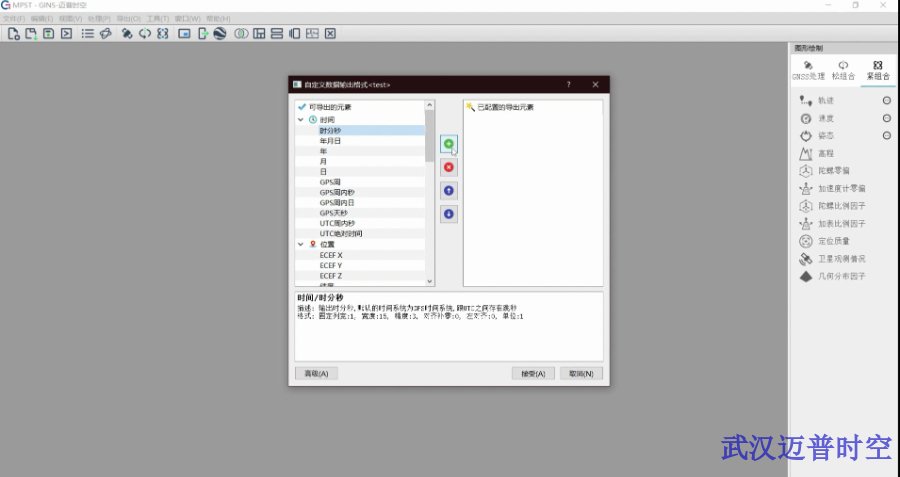
迈普时空MP-GINS软件提供的SDK开发包,为系统集成商和大型企业用户打开了二次创新的大门,使得高精度组合导航解算能力能够像积木一样被灵活拼接和调用。SDK包含了丰富的API接口函数、详尽的开发文档和典型的调用示例,开发者可以在Visual Studio等主流开发环境中,通过C++或C#等编程语言轻松调用MP-GINS的核、心功能。无论是需要将POS解算功能嵌入到无人机地面站软件中,实现飞行数据的闭环处理;还是希望开发一个基于云计算的批量数据处理平台,为用户提供SaaS服务;亦或是在无人驾驶仿真测试平台中集成高精度轨迹生成模块,SDK都能够提供坚实的底层支撑。这种开放式的合作模式,赋予了合作伙伴更大的技术自主、权和商业想象力,共同构建更加繁荣的高精度定位应用生态。迈普时空MP-GINS输出结果支持自定义格式,满足各类专业应用系统的数据对接需求。新疆轨检小车处理软件公司
迈普时空MP-GINS软件的自动零速修正功能,是专门针对城市测量中频繁启停工况设计的智能误差抑制技术。当移动测量车辆遇到红灯或交通拥堵需要临时停车时,组合导航系统如果继续按照惯性进行解算,微小偏差会随时间累积。MP-GINS软件能够通过检测IMU数据特征,智能识别出车辆处于静止状态的时刻,并立即触发零速修正机制。在静止期间,软件将速度真值锁定为零,利用这一信息反向估计和修正惯导的零偏误差、安装误差角等系统误差参数。当车辆再次起步时,系统已经过一轮误差清洗,能够以更纯净的状态重新开始导航。这种在频繁启停过程中不断自动“校零”的能力,对于保证城市、长距离移动测量的姿态精度和位置精度至关重要,它有效防止了误差的长时间积累,确保从早到晚的长时间作业都能保持高精度。黑龙江轨道检测仪后处理软件厂迈普时空MP-DAM支持IMU安装角和双天线安装角现场标定,即时获取精确标定结果。
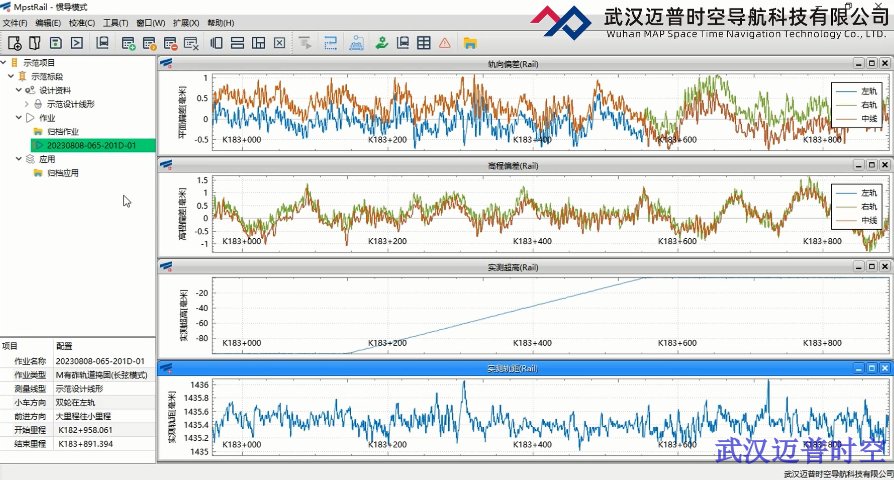
轨道不平顺是衡量轨道质量的核、心指标,它与列车运行的平稳性、安全性和乘客的舒适度直接相关。InsRail软件的轨道不平顺参数分析模块,能够基于高精度的轨道三维坐标,自动计算和输出全套的轨道不平顺指标。在轨向不平顺方面,软件通过分析轨道中线的横向偏差,识别出不同弦长下的轨向不良区段;在高低不平顺方面,软件通过分析轨面高程的纵向波动,准确捕捉高低不平顺的位置和幅值;在三角坑方面,软件基于基长计算轨面扭曲程度,识别可能导致轮载转移的安全隐患;在超高不平顺方面,软件分析实际超高与设计超高的偏差,评估曲线通过质量。通过对这些参数的定期监测和历史数据的对比分析,工务部门可以全、面掌握线路质量的变化趋势,从被动维修转向预测性维护,科学制定维修计划,优化资源配置。
迈普时空MP-GINS软件在设计之初就深刻洞察了用户群体的多元化需求,因此在用户体验上实现了专业性与易用性的完美平衡。对于刚刚接触组合导航技术的新用户,软件的工程向导功能堪称贴心的技术导师,它通过清晰的步骤引导和智能化的默认参数设置,帮助用户轻松完成从新建工程、导入数据、选择模式到输出结果的全过程,即使是首、次使用也能在短时间内掌握基本操作流程。而对于那些在该领域深耕多年、对数据处理有独特见解的资、深专、家,软件则敞开了高级选项的大门,提供了诸如IMU安装误差精细标定、GNSS解算策略自定义、数据平滑滤波参数调整、多基站权重设置等数十项可调参数。这种分层级的功能设计,既保证了软件的低门槛上手体验,又满足了专业用户对数据处理过程的完全掌控欲,使得MP-GINS能够成为从高校实验室到专业测绘院、从初创企业到大型国企的通用选择。MP-GINS双系统惯导数据处理完整支持北斗+GPS,符合自主可控发展战略。
多基站模式处理:破、解长距离作业精度衰减难题 在长距离带状测绘项目中,随着测区与基准站距离的增加,GNSS差分精度会不可避免发生衰减。MP-GINS创新的多基站处理模式,允许用户同时接入多个地面基准站的观测数据,通过联合解算和加权优化,有效抑制距离相关误差,显、著提升长测程的定位精度。这一功能对于铁路线路勘察、高速公路测量、油气管道巡检等长距离带状工程具有极高的实用价值,用户无需频繁迁移基准站即可获得全线高精度轨迹,大、大提升了外业效率和数据一致性。MP-GINS软件工程向导助新用户快速上手,高级选项满足专业用户的行业特定需求。新疆轨检小车处理软件公司
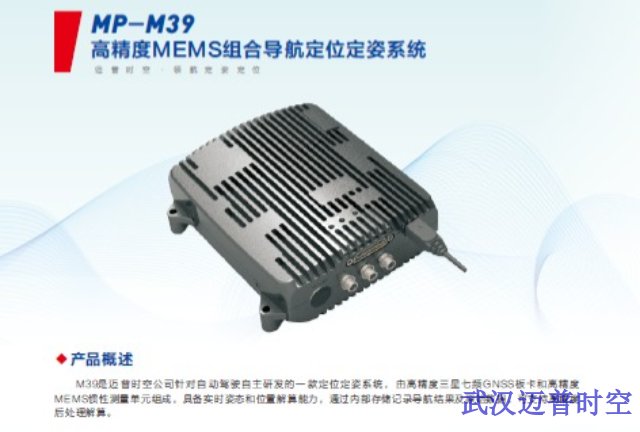
MP-GINS搭配迈普时空POS系列硬件,软硬协同设计让系统集成更简单、性能更卓、越。新疆轨检小车处理软件公司
铁路轨道检查仪数据后处理软件软件特点:
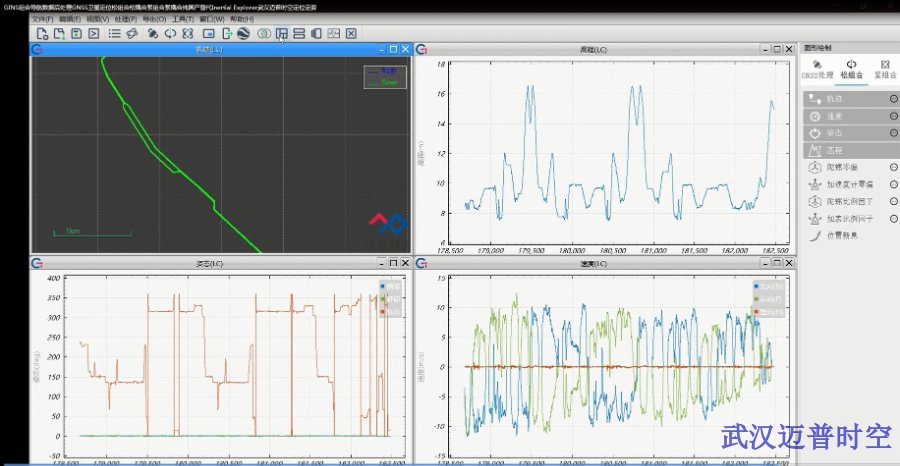
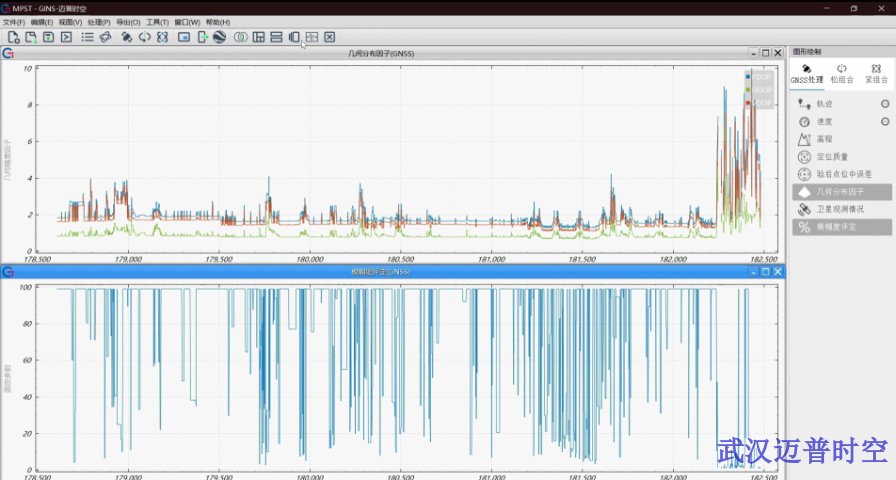
(1)GNSS动态差分后处理的定位与测速解算支持北斗与GPS系统,处理速度极快,可靠性高,精度高。
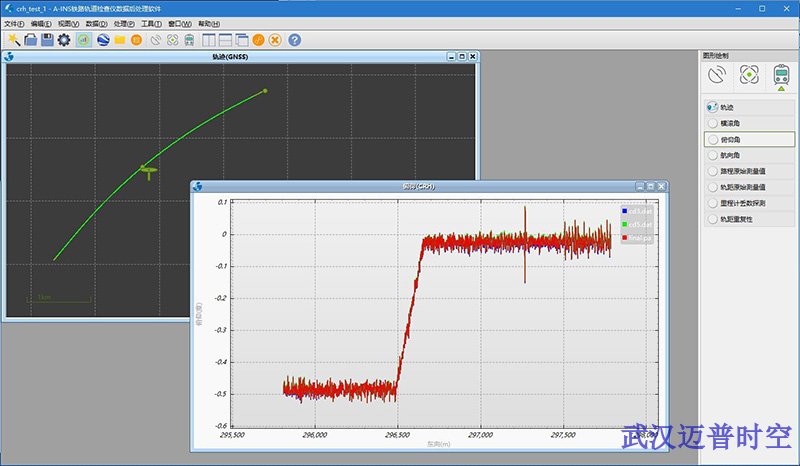
(2)A-INS组合导航解算,加入惯导仪器数据进行解算,支持GNSS、里程计、非完整性约束、零速修正等辅助信息,大、大提高定位精度与可靠性,同时能够提供姿态信息。
(3)高精度轨道参数测量通过测量数据得出高精度的轨道中线和左右钢轨的三维坐标、轨道三维姿态、轨道里程和实测轨道距值。
(4)计算轨道调整量包括左右钢轨轨向调整量(平面调整量)、高程调整量、轨道超高、轨距偏差等各项参数。
(5)分析轨道不平顺参数包括轨向不平顺、高低不平顺、三角坑和超高不平顺等各项轨道不平顺参数。
(6)轨道形变位置分析可以精确确定轨道形变发生的位置,里程定位误差不大于5厘米。 新疆轨检小车处理软件公司
武汉迈普时空导航科技有限公司汇集了大量的优秀人才,集企业奇思,创经济奇迹,一群有梦想有朝气的团队不断在前进的道路上开创新天地,绘画新蓝图,在湖北省等地区的仪器仪表中始终保持良好的信誉,信奉着“争取每一个客户不容易,失去每一个用户很简单”的理念,市场是企业的方向,质量是企业的生命,在公司有效方针的领导下,全体上下,团结一致,共同进退,**协力把各方面工作做得更好,努力开创工作的新局面,公司的新高度,未来武汉迈普时空导航科技供应和您一起奔向更美好的未来,即使现在有一点小小的成绩,也不足以骄傲,过去的种种都已成为昨日我们只有总结经验,才能继续上路,让我们一起点燃新的希望,放飞新的梦想!