迈普时空MP-GINS软件在数据处理精度上树立了行业标、杆,它能够实现厘米级的定位精度,为各类高精度测绘项目提供了可靠的数据基础。具体技术指标显示,在基线长度小于25公里的范围内,软件能够达到水平精度2厘米+1ppm、垂直精度3厘米+1ppm的优异表现,这意味着即使是在长达10公里的基线两端,其水平误差也能控制在3厘米以内,完全满足1:500大比例尺测图、精密工程测量和变形监测等严苛应用的需求。这一精度水平的实现,得益于软件核、心算法对GNSS载波相位观测值的精细处理和对IMU误差模型的准确标定,它能够有效消除卫星轨道误差、电离层对流层延迟以及惯性器件漂移等多种误差源的影响。无论是应用于无人机航空摄影测量中的高精度姿态控制,还是地面移动扫描系统中的轨迹解算,MP-GINS都能确保蕞终成果的几何精度,让用户的后处理数据经得起任何专业检验。迈普时空MP-GINS车载IMU安装角自动标定,简化系统集成流程,确保安装偏差准确补偿。陕西轨道检测仪后处理软件技术服务
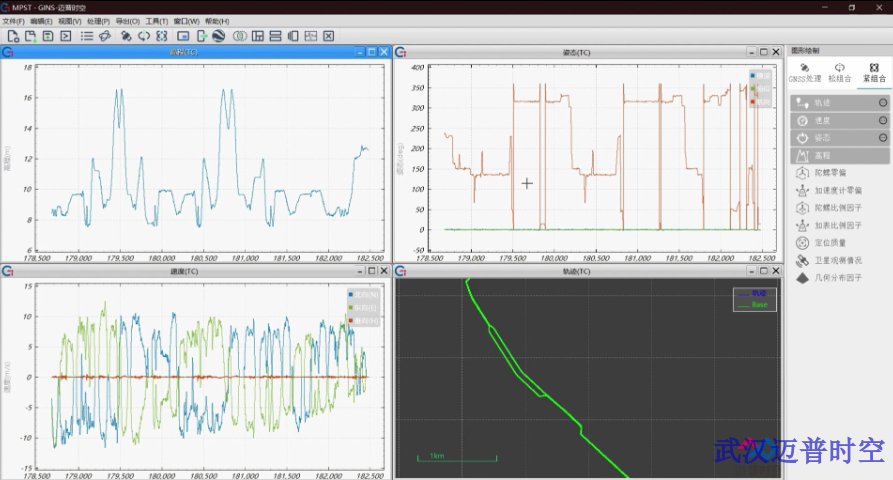
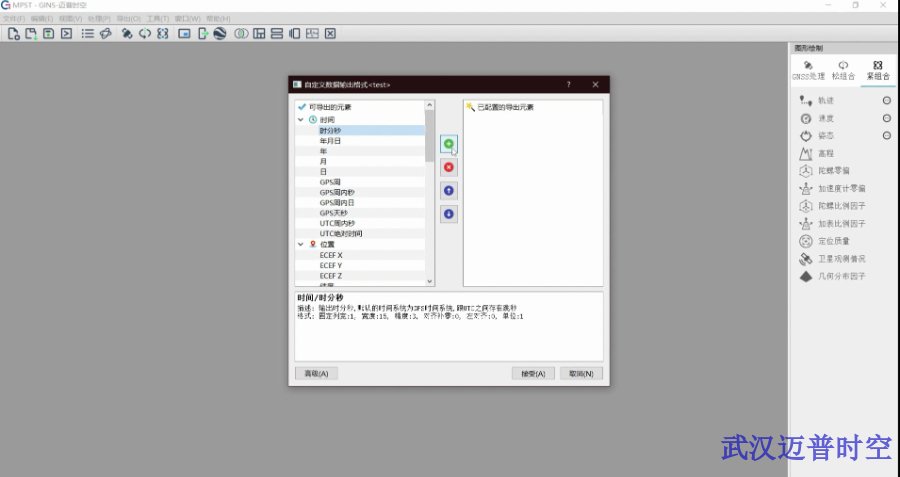
迈普时空MP-DAM实时监控软件的解码功能,不只只是简单的数据回放,它为用户提供了一套完整的组合导航数据后处理分析工具。当外业采集结束后,用户可以将原始数据文件导入MP-DAM,软件能够快速解码并解析出组合导航结果,生成标准格式的文本文件,方便用户在Excel中进行统计分析或在MATLAB中进行二次开发。同时,软件还支持一键生成KML文件,用户可以直接在Google Earth中打开,以三维视角浏览整个作业轨迹,检查是否有明显的偏离或数据空洞。这种从实时监控到后处理分析的无缝衔接,使得MP-DAM不只是一个现场工具,更是一个轻量级的数据检查和质量初评平台。用户可以在外业现场立即回放数据,初步确认数据质量合格后再收队,大、大提高了外业工作的效率和成果的可靠性。云南高精度POS数据后处理软件服务商迈普时空MP-GINS紧耦合技术让低等级惯导在城市复杂环境中依然输出高精度结果。
迈普时空MP-DAM实时监控软件支持多种数据接收方式,能够适应各种现场硬件连接环境。在实验室或设备调试阶段,用户可以通过串口线直接连接设备,进行参数配置和数据监控,这种方式简单可靠。在外业移动测量车上,软件则可以通过网口连接,实现高速率数据流的稳定传输,支持更高的数据输出频率和更丰富的数据内容。软件还支持同时连接多个串口或网口设备,可以同时监控主系统和备份系统的运行状态。对于需要进行远程监控的应用场景,软件支持将实时数据通过网络转发到远端的监控中心,实现异地同步监控。这种灵活多样的连接方式,确保了无论是在研发测试、设备集成还是外业生产等不同阶段,MP-DAM都能作为可靠的监控平台发挥作用。
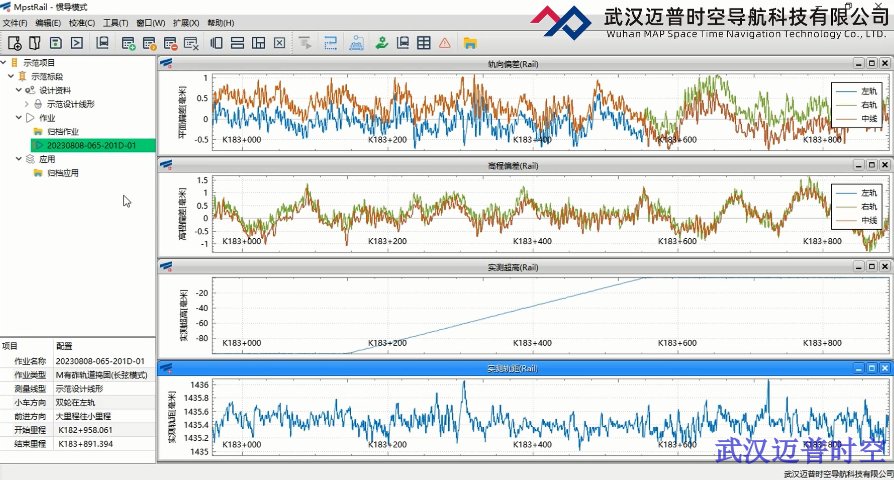
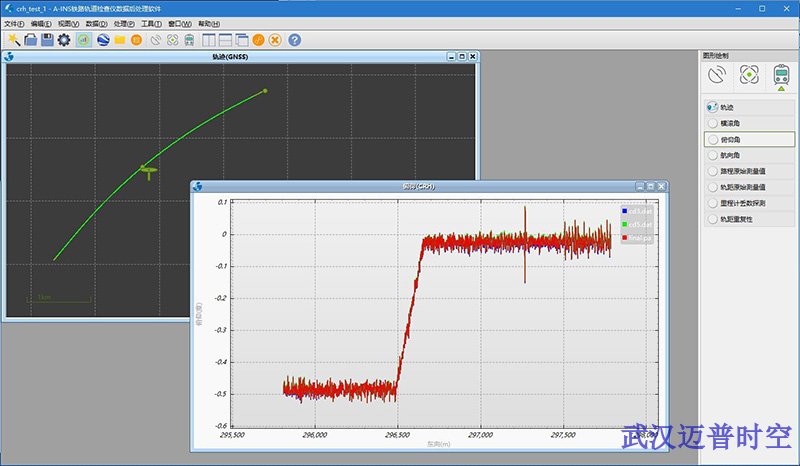
轨道精调是新建铁路开通前和运营线路周期性维护中蕞关键的作业环节,其核、心在于计算出科学、经济、可操作的调整量。InsRail软件的轨道调整量估计模块,正是为这一核、心需求提供了智能化的解决方案。软件以设计线型或目标平顺线型为基准,将实测的轨道三维坐标与基准线型进行精确比对,通过蕞优化算法计算出将当前轨道调整至目标状态所需的蕞小调整量。这些调整量包括:左右钢轨的轨向调整量,即平面上的拨道量;左右钢轨的高程调整量,即垂向上的起道量;以及根据曲线超高要求计算出的超高调整量。软件还会输出轨距偏差校正值,指导作业人员调整轨距杆。这些计算结果可以直接导出为精调作业指导书,现场作业人员可以按图索骥,精、准地进行起道拨道作业,一次调整到位,避免了传统方法中“测量-调整-再测量”的多次反复,大幅提高了精调作业的效率和精度。MP-DAM解码组合导航结果文件可生成KML及TXT,便于后续分析与成果展示。
迈普时空MP-GINS软件的车载运动约束功能,是针对陆上交通工具运动特性而开发的精度增强技术,它巧妙地将车辆的物理运动规律作为虚拟传感器融入组合导航解算中。在车辆正常行驶过程中,除非发生侧滑或跳跃,否则其侧向和垂向的速度理论上应为零,这就是所谓的非完整性约束。MP-GINS软件将这一先验知识作为强约束条件加入卡尔曼滤波器,当GNSS信号短时中断时,这些运动约束能够有效抑制惯导航向和水平姿态的误差漂移。同时,软件还利用车辆的速度脉冲信号或CAN总线数据作为里程计辅助,精确测量车辆的前向位移。这些车载辅助功能的综合运用,使得MP-GINS在城市峡谷、林荫道等信号频繁遮挡的环境中,依然能够输出比单纯依靠IMU积分平滑得多的轨迹,大、大提高了数据的内符合精度和外业采集的一次成功率。迈普时空MP-GINS的Event事件输出、降采样输出、目标点投影满足专业应用需求。云南高精度POS数据后处理软件服务商
MP-GINS车载辅助功能集成自动对准、里程计辅助、车辆运动约束和自动零速修正。陕西轨道检测仪后处理软件技术服务
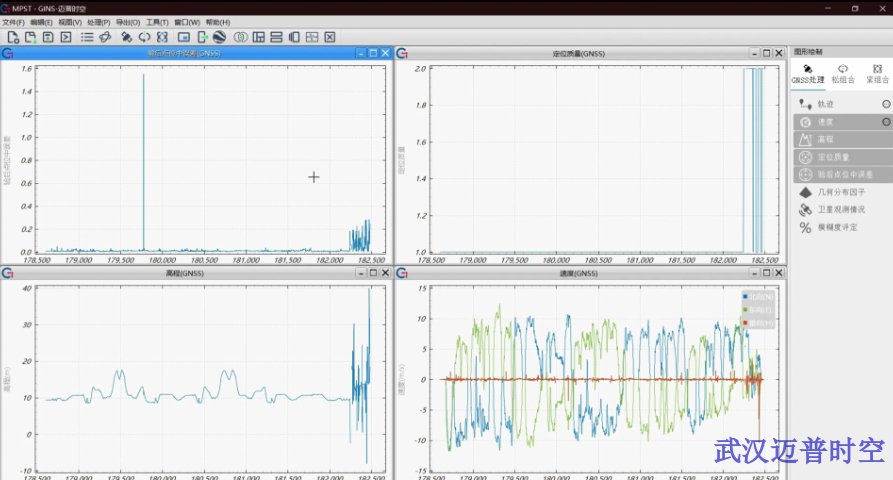
迈普时空MP-GINS软件的高精度定向能力,使其在双天线测向应用中表现出色,为需要精确航向信息的应用场景提供了可靠的技术支撑。软件支持双天线GNSS数据的联合解算,能够利用两个天线之间的载波相位差分观测值,精确解算出基线的方向,进而获得载体的航向角。相比于单天线+IMU的组合方式,双天线模式提供的航向信息是绝、对航向,不存在磁偏角干扰,也不会随时间漂移。MP-GINS软件进一步将双天线解算的航向作为高精度观测值引入组合导航滤波器,与IMU的角速度测量值进行深度融合。这种融合方式使得系统即使在GNSS信号短暂丢失时,也能凭借IMU保持短时高精度航向;而当GNSS恢复时,又能用绝、对航向对IMU的累积误差进行修正。软硬件结合的优化设计,使得MP-GINS成为船载测量、车载测绘、航空遥感等领域获取高精度姿态信息的理想选择。陕西轨道检测仪后处理软件技术服务
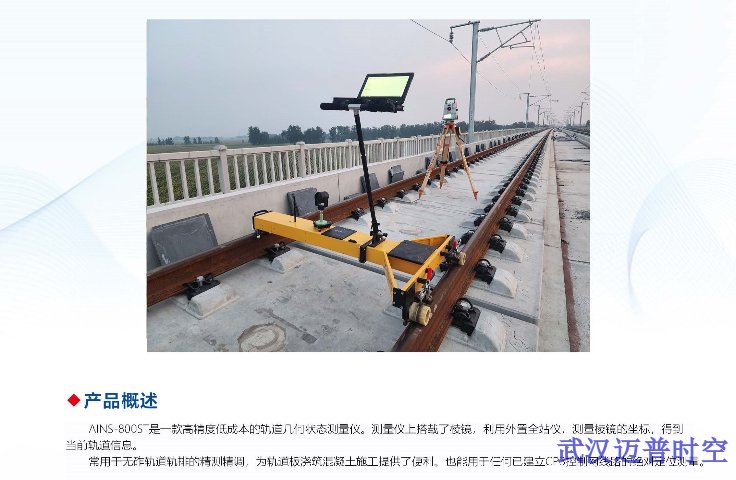
武汉迈普时空导航科技有限公司(简称“迈普时空”)是一家专业从事北斗精密定位定姿及应用的高、新、技、术企业。公司依托武汉大学卫星导航定位技术研究中心由中国工程院院士、“千人、计划”、“长江学者”、海外归国专、家5人合伙创立。公司致力于北斗GNSS/INS组合导航产品软硬件系统的集成、研发与应用,以定位定姿系统(POS)作为其GNSS/INS组合导航产品和服务的突破口,面向国内外车载、机载和船载的高精度定位定姿应用,在突破测绘遥感应用的基础上,为精密工程测量、移动测绘、高铁轨道几何形变检测等工程技术应用提供综合技术服务;为精细农业机械、无人机遥感、车载移动测绘、自动驾驶汽车等提供精、准定位定姿设备。