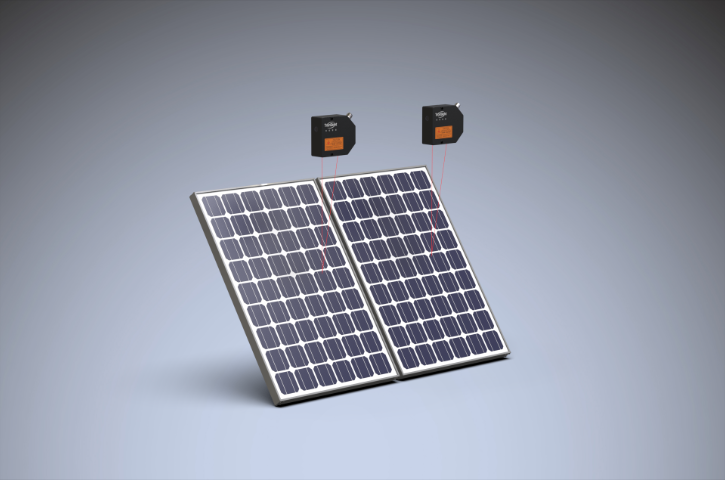
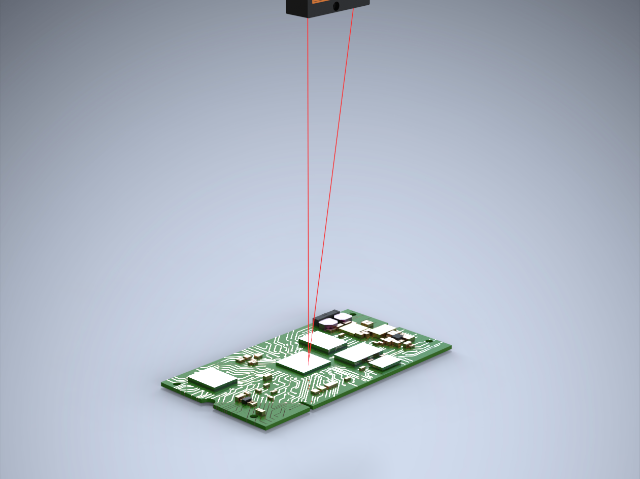
综上所述,激光位移传感器检验校准装置的优点在于:1、通过所述电子千分表221,使得所述激光位移传感器4的检验精度极大提高。2、通过所述电动伸缩双直线导轨11,简化了检验流程、当设备闲置时收缩导轨可节约占地面积。虽然以上描述了本实用新型的具体实施方式,但是熟悉本技术领域的技术人员应当理解,我们所描述的具体的实施例只是说明性的,而不是用于对本实用新型的范围的限定,熟悉本领域的技术人员在依照本实用新型的精神所作的等效的修饰以及变化,都应当涵盖在本实用新型的权利要求所保护的范围内。激光位移传感器在半导体行业的应用案例。东莞激光位移传感器设备生产

带通滤光片,设置于成像物镜的入射光路上。聚焦透镜,设置于激光器的出射光路上。可选地,上述感光元件为线阵感光元件,线阵感光元件的多个感光单元沿直线排列,该直线的延伸方向为多个感光单元的主要排列方向。上述也可以是感光元件为面阵感光元件,面阵感光元件包括以矩形排列的多个感光单元,面阵感光元件的长边延伸方向为多个感光单元的主要排列方向。此外,上述成像物镜可以为单一镜片,且成像物镜的物侧面和像侧面皆为非球面;或者,成像物镜为多个透镜组成的透镜组。国内激光位移传感器推荐厂家它抗干扰能力强,能够在复杂环境下正常工作。
从理论分析和实际状况来看,不管是哪种被测的道路表面,也无论其材料、颜色、反射率、表面粗糙度等是否均匀,它对检测结果造成的影响主要表现在:表面激光散射点经过光学成像镜头成像后,其像点的大小、形状、光强严格来讲是随机变化的,成像的光斑并不均匀对称。在激光位移传感器中,像面上像点光斑的不对称分布是影响激光位移传感器精度的主要因素。此外,影响传统类型激光位移传感器检测精度的另一个重要因素是该传感器中的光电接收芯片的光电特性。当激光位移传感器的接收芯片采用CCD(光电耦合器件)芯片时,由于常用的CCD芯片在光照很强时,会产生饱和拖尾现象,并由此直接造成像点光斑的极大不对称,这对检测结果会产生极大影响,严重降低检测精度。
从图3所示的成像光学系统结构图可看出,在整个物面并不垂直于光轴时,经过系统成像以后得到的像面也不垂直于光轴,与光轴存在一定的夹角β,设计的lastβ优化值取为60.4628°,此时像面上可得到比较理想的光斑分布。在工作范围内不同视场的散射光均能很好地成像于探测器。在图4中可看到不同视场的成像光斑形状,此点列图表明成像光斑分布均匀,但还存在一定的剩余像差,主要为球差,光斑大小可见表2,光斑直径在20μm左右。同时根据设计结果可得像距为33.092mm,经计算tanα/tanβ=0.6137,di/do=0.6145,此物镜设计基本满足于Scheimpflug理想成像条件。它具有高度稳定性和可靠性。
在感光元件的多个感光单元的主要排列方向为子弧矢向的情况下,成像物镜本身的MTFS>MTFT、或者在感光元件的多个感光单元的主要排列方向为子午方向的情况下,成像物镜本身的MTFT>MTFS,使得解析结果满足条件;和/或在成像物镜前和/或在成像物镜后加入能够引入像散的光学元器件,并且配合微调所述成像物镜与所述感光元件之间的相对距离使得解析结果满足条件。反光元件,反光元件设置在成像物镜的出射光路上,成像物镜的出射光经反光元件反射后,入射到感光元件。高精度激光位移传感器可以用于测量液体的位移,如液位的变化等。国内激光位移传感器推荐厂家
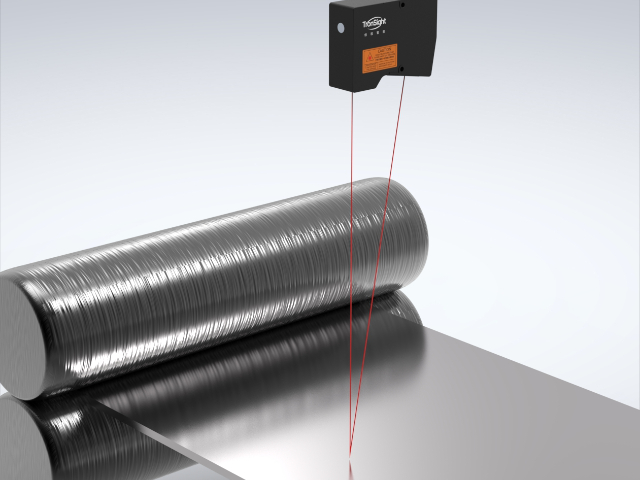
光谱共焦位移传感器是一种高精度的光学测量仪器,能够实现非接触式的表面形貌测量。东莞激光位移传感器设备生产
激光位移传感器的测量精度容易受到被测物体表面特征的影响,为了减小测量误差,在整形镜设计中应尽量使出射光斑在有效的测量范围内实现光斑小且均匀。针对传感头小型化设计的要求,半导体激光器体积小、重量轻的优点正好符合这一要求,但其光束质量并不理想,需要对其进行光束整形。半导体激光器快慢轴的光束分布极不对称:快轴发散角较大,半角的典型值为30~40°,光束呈高斯分布,发光范围的半宽度为0.6~0.8μm,慢轴发散角的半角典型值为3~6°,光束分布不规则,发光范围半宽度为50~100μm。因此,在不允许能量损失的情况下,要求整形系统的物方数值孔径(NA)>0.573;但由于光束的快轴能量呈高斯分布,通常取半宽度(FWHM)为20°,此时NA=0.342。系统物距应尽量小一些,但考虑到工艺问题,不宜过小,选定为2.5mm。为了便于设计,将系统倒置,整个系统的主要要求为:工作波长为785±10nm,像方NA=0.342,像距l′=2.5mm,物距l=40~60mm,焦距f=3~4mm。东莞激光位移传感器设备生产