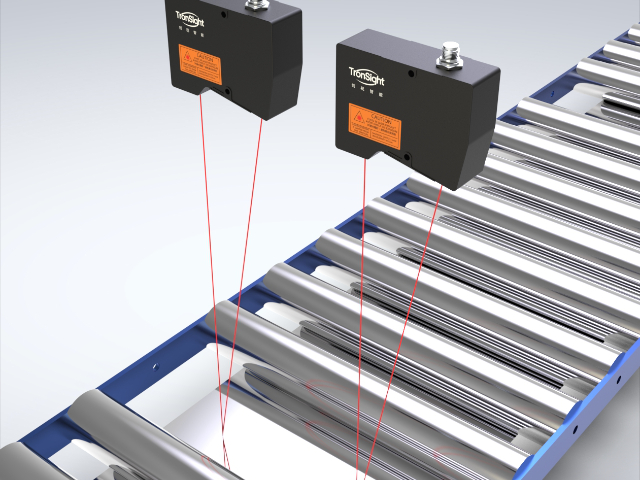
如权利要求2所述的激光位移传感器检验校准装置,其特征在于:所述微调装置包括一蜗轮蜗杆机构、一电子测量仪以及一微调平台;所述微调平台设于所述电动伸缩双直线导轨上端的尾部,所述微调平台的末端向上设有一延伸部;所述蜗轮蜗杆机构设于所述微调平台的前端;所述电子测量仪的一端抵接于所述延伸部,另一端抵接于所述蜗轮蜗杆机构。如权利要求3所述的激光位移传感器检验校准装置,其特征在于:所述蜗轮蜗杆机构包括一横向蜗杆、一蜗轮以及一位移调节把手;所述横向蜗杆的一端与所述激光红外线接收挡板的背面固接,另一端与所述电子测量仪抵接;所述位移调节把手与所述蜗轮的中心固接。激光位移传感器在新能源锂电行业的应用案例。新品激光位移传感器欢迎选购

从理论分析和实际状况来看,不管是哪种被测的道路表面,也无论其材料、颜色、反射率、表面粗糙度等是否均匀,它对检测结果造成的影响主要表现在:表面激光散射点经过光学成像镜头成像后,其像点的大小、形状、光强严格来讲是随机变化的,成像的光斑并不均匀对称。在激光位移传感器中,像面上像点光斑的不对称分布是影响激光位移传感器精度的主要因素。此外,影响传统类型激光位移传感器检测精度的另一个重要因素是该传感器中的光电接收芯片的光电特性。当激光位移传感器的接收芯片采用CCD(光电耦合器件)芯片时,由于常用的CCD芯片在光照很强时,会产生饱和拖尾现象,并由此直接造成像点光斑的极大不对称,这对检测结果会产生极大影响,严重降低检测精度。赣州激光位移传感器源头直供厂家激光位移传感的工作原理是什么?

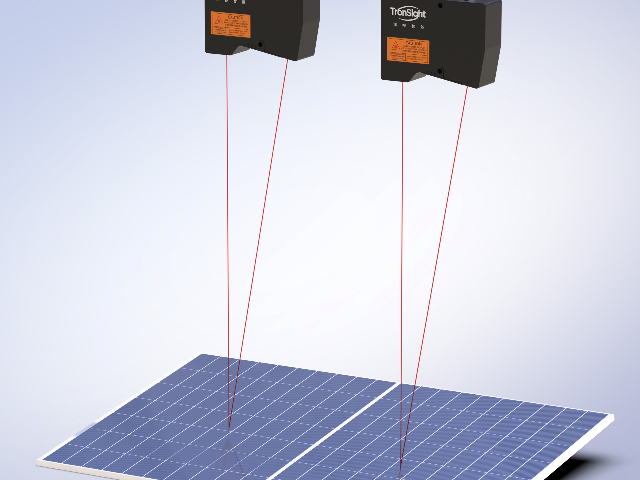
传统的接触式平面检测精度低、稳定性差及对对象物检测条件要求苛刻,已逐渐被现代非接触式平面检测所替代。非接触式激光平面检测系统以其高精度、高分辨率及不受对象物材质、颜色或倾斜度的影响等优点,可对任何对象物进行平面检测。介绍系统结构和激光位移传感器的工作机理,并进行平面定性检测和定量检测试验,用OpenGI。绘制及拟合三维曲面。试验结果表明,该系统平面检测结果较好地反映出对象物平面起伏情况,并且达到系统的精度要求。
在图1所示的实施例中,成像物镜6包含以下两种结构形式:(形式一)成像物镜6为物侧面和像侧面都为非球面的单一非球面镜片,(形式二)成像物镜6是由多个镜片组合而成的透镜组。综上所述,本发明在激光位移传感器的光学系统设计时,利用增加像散,在感光元件的感光单元沿着S方向排列的情况下,拉高成像物镜S方向的MTF值同时降低T方向上的MTF值,使得线阵感光元件上的光斑呈现长条状态,进而实现以下技术效果:降低激光位移传感器中成像物镜的设计难度,同时降低了设备的成本;它们通常具有小巧的尺寸和轻便的重量,可以方便地安装在各种设备和系统中。

随着现代化工业的发展,激光位移传感器作为高精度、高响应的非接触测量仪器,在光电技术检测领域得到了大范围的应用。其采用的激光三角法原理在理论上已相当成熟,但在实际应用中还有一定的困难。由于三角法建立在理想成像的基础之上,所以三角法能否准确实现还要依赖于所采用的光学系统。现阶段,国外此类的高精度物镜设计处于前沿水平,并拥有比较成熟的产品,但其多透镜组合与非球面的加工方式在制造成本上相当昂贵。国内对激光位移传感器光学系统的研究主要还处于实验性阶段,尚没有形成产品化。针对目前市场上对激光位移传感器的大范围需求,本文从简单实用的角度出发,利用CODEV光学设计软件对激光三角法进行实际光路模拟与优化设计,形成了一整套具有优良成像特性的光学系统,为传感器的产品化生产提供了理论依据。高精度激光位移传感器具有较高的灵敏度,能够检测微小的位移变化。原装激光位移传感器市场价格
这种传感器具有较高的稳定性和可靠性,能够长时间稳定地工作。新品激光位移传感器欢迎选购
所述微调装置2包括一蜗轮蜗杆机构21、一电子测量仪22以及一微调平台23;所述微调平台23设于所述电动伸缩双直线导轨11上端的尾部,所述微调平台23的末端向上设有一延伸部231;所述蜗轮蜗杆机构21设于所述微调平台23的前端;所述电子测量仪22的一端抵接于所述延伸部231,另一端抵接于所述蜗轮蜗杆机构21。所述蜗轮蜗杆机构21包括一横向蜗杆211、一蜗轮(未图示)以及一位移调节把手212;所述横向蜗杆211的一端与所述激光红外线接收挡板5的背面固接,另一端与所述电子测量仪22抵接;所述位移调节把手212与所述蜗轮固接;当旋转所述位移调节把手212时通过所述蜗轮联动所述横向蜗杆211进行横向位移。新品激光位移传感器欢迎选购