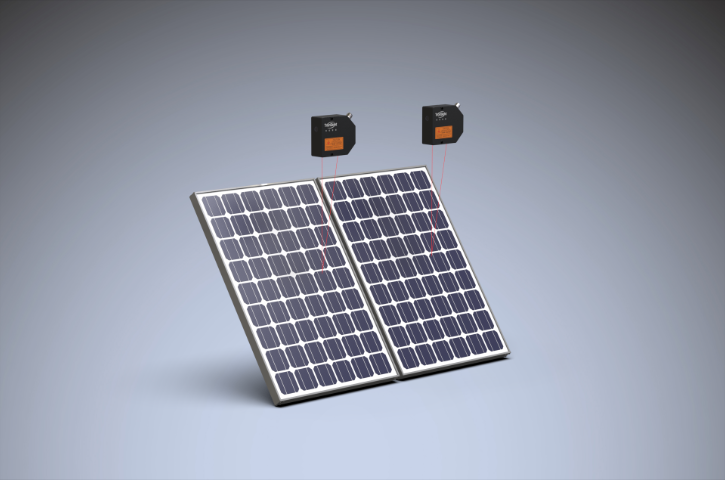
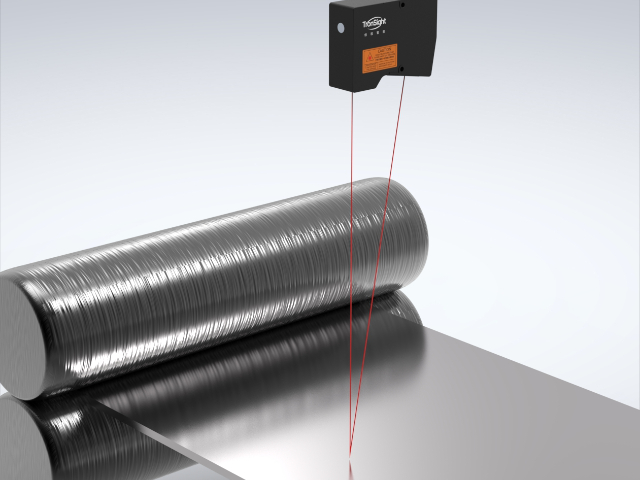
系统的整体结构如图1所示。从图1可以看出,整个系统由上位机、激光位移传感器和平台运动控制系统三部分组成。激光位移传感器由激光位移控制器、感测头和监视器组成。平台运动控制系统主要由平移台运动控制器、驱动器、电源和二维电动平移台组成。系统的部分设备如图2所示。图2列出了激光位移传感器感测头和二维电动平移台。图3为激光位移传感器感测头测量对象物原理。参考距离根据被测对象物的变化可测量范围为2 mm,基准距离为30 mm,传感器显示解析度为0.3μm,线性度达到满量程的0.3%,即精度达到6μm。使用激光位移传感器测量目标物时,必须让接收器获得来自目标物的反射光。奉贤区激光位移传感器定做

所述可伸缩导轨1包括一电动伸缩双直线导轨11、一No.1支撑件15、一第二支撑件16、一滑动轮12、一伸缩制动开关13以及一控制面板14;所述电动伸缩双直线导轨11包括一伺服电机(未图示)、一双直线导轨111以及一丝杆(未图示),所述丝杆设于所述双直线导轨111内部,所述丝杆与所述双直线导轨111动联接,所述伺服电机设于所述双直线导轨111的末端且与所述丝杆连接,所述伺服电机通过所述丝杆联动所述双直线导轨111进行伸缩;所述No.1支撑件15安装在所述电动伸缩双直线导轨11固定端的底部,所述第二支撑件16安装在所述电动伸缩双直线导轨11可伸缩端的底部;所述滑动轮12设于所述第二支撑件16的底部,所述电动伸缩双直线导轨11可通过所述滑动轮12进行伸缩;所述伸缩制动开关13设于所述第二支撑件16的侧面,用于伸缩制动的开启与关闭;所述控制面板14与所述电动伸缩双直线导轨11电连接,所述控制面板14用于控制所述电动伸缩双直线导轨11的伸缩距离。嘉定区激光位移传感器源头直供厂家高精度激光位移传感器采用激光技术,能够实现非常精确的位移测量。

除了上述具体的技术手段外,道路检测激光位移传感器的整体性能提升还需要依赖于硬件设计与软件算法的协同优化。在硬件方面,采用高精度、高稳定性的激光器和探测器是关键。这些器件的性能直接决定了系统的测量精度和稳定性。同时,合理的光路设计和紧凑的机械结构也是必不可少的,它们能够减少光路中的能量损失和干扰,提高系统的整体效率。在软件算法方面,除了前面提到的图像处理技术和自适应光学控制算法外,还需要开发一套完整的数据处理和分析系统。该系统能够实时接收传感器采集的数据,进行滤波、去噪、校准等预处理操作,然后运用先进的数学模型和算法对位移信息进行精确计算。
在软件算法方面,除了前面提到的图像处理技术和自适应光学控制算法外,还需要开发一套完整的数据处理和分析系统。该系统能够实时接收传感器采集的数据,进行滤波、去噪、校准等预处理操作,然后运用先进的数学模型和算法对位移信息进行精确计算。同时,系统还应具备自我学习和优化的能力,能够根据历史数据和实时反馈自动调整参数和策略,以适应不断变化的检测环境。优化后的道路检测激光位移传感器将在道路养护、车辆自动驾驶、智能交通系统等领域发挥重要作用。它们的稳定性使得测量结果具有较高的重复性和可信度。

2、与传统激光位移传感器相比,本发明所涉及的激光位移传感器在光学系统中,S方向的成像质量更高,进而从理论上可提高其测量精度;3、通过增加像散使线阵感光元件上的光斑信号呈现长条状态,增大光斑信号与像元之间的接触面积,进而降低机械件变形对信噪比的影响。在以上描述的实施例中,感光元件的感光单元沿着水平方向(将弧矢方向定义为水平方向)排列,将成像物镜6和感光元件7所组成的成像系统在子午方向上的MTF值降低,而将弧矢方向上的MTF值拉高。在其他实施例中,感光元件的感光单元沿着竖直方向(将子午方向定义为竖直方向)排列,此时,可以将成像物镜6和感光元件7所组成的成像系统在弧矢方向上的MTF值降低,而将子午方向上的MTF值拉高。这样,同样能够达到上述类似的技术效果。以上所述only为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。它可以用于测量物体的形状和轮廓,以提供准确的几何信息。高速激光位移传感器货真价实
为什么要使用激光位移传感器呢?奉贤区激光位移传感器定做
要想在工作范围内得到好的光斑质量,可采用柱面镜或非球面实现,另外波前编码和切趾法在延拓焦深方面也有很好的效果[3,4],但这样的光学系统相对较复杂,元件较多,不宜装调,成本也会增长。因此,在精度允许的情况下,可考虑全部采用球面镜,不考虑焦深延拓,用变倍的方法实现在40、45、50、55、60mm物距处光斑大小尽量均匀一致。根据光谱分布,设定中心波长权重为3,边缘波长权重为1。要消掉少量的色差,系统至少需要两片镜片。根据以上要求选定了一个初始结构,经过优化得到以下best设计结果。图2为优化后的镜头结构(像距在50mm处)。表1为effective工作范围内轴上视场的光斑大小分布。奉贤区激光位移传感器定做