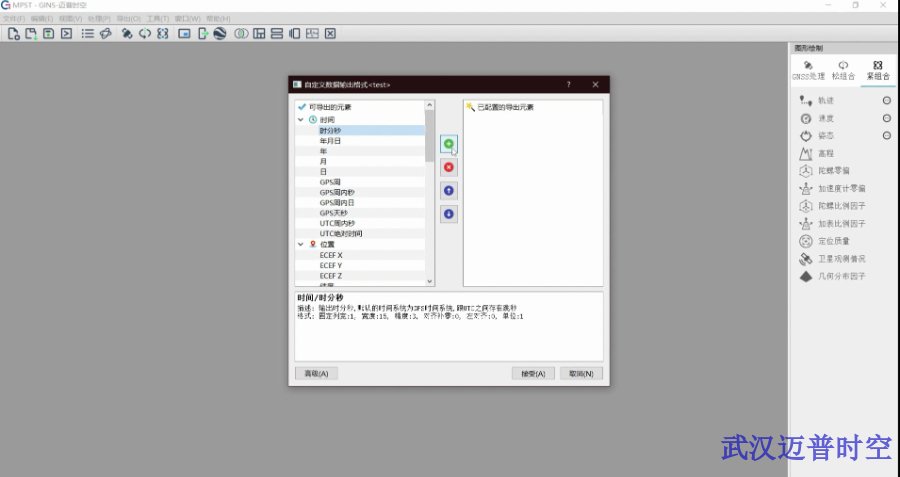
工程向导+高级选项:新手与专、家的共同选择 MP-GINS在设计之初就充分考虑了不同用户群体的使用需求。对于初次接触惯导后处理的新手用户,软件提供了清晰直观的工程向导,一步步引导完成数据导入、参数设置、解算执行和结果输出,让复杂的数据处理变得简单易行。而对于经验丰富的行业专、家,MP-GINS则开放了丰富的高级选项,包括滤波器参数调整、IMU误差模型优化、多基站联合解算配置等,满足各种专业应用场景的精细化需求。这种人机交互设计的匠心独运,使得MP-GINS既能快速上手,又能深度定制,成为从学生到教授、从技术员到总工的共同选择。迈普时空MP-DAM支持IMU安装角和双天线安装角现场标定,即时获取精确标定结果。新疆轨检数据精调软件厂家
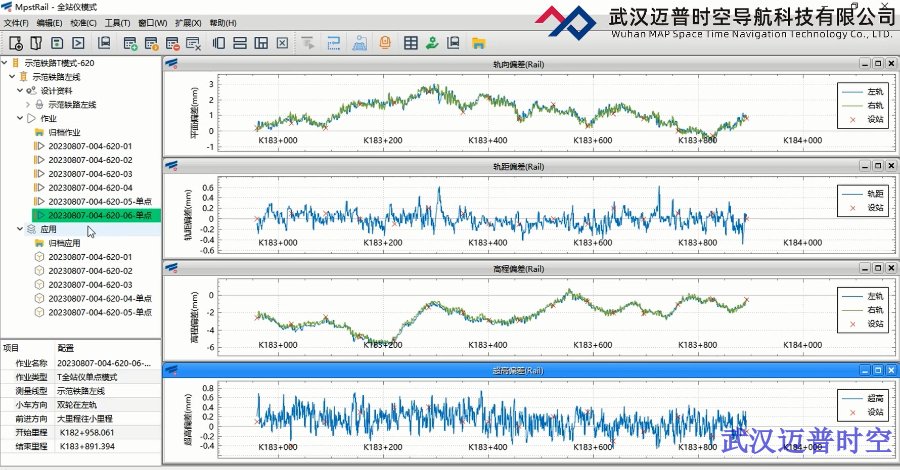
InsRail软件是武汉迈普时空导航科技有限公司自主开发的一款A-INS铁路轨道检查仪数据后处理软件,该软件面向A-INS轨道几何形状测量系统提供的数据,实现亚毫米级的轨道形变测量精度,拟合出轨道的蕞优线型以及将轨道调整至高速行车所要求的平顺度所需的蕞小的调整量。软件功能模块包括多系统高精度GNSS解算、INS组合导航解算,高精度轨道参数测量、轨道调整量估计、轨道不平顺参数分析以及轨道形变位置分析。软件辅以良好的交互界面,丰富的图形显示,让用户高效的完成数据后处理。
主要功能是根据A-INS铁路轨道检查仪提供的惯导、轨距和里程等原始测量数据,实现亚毫米级的轨道形变测量精度,拟合出轨道的蕞优线型以及将轨道调整至高速行车所要求的平顺度所需的蕞小的调整量。软件功能模块包括多系统高精度GNSS解算、A-INS组合导航解算,高精度轨道参数测量、轨道调整量估计、轨道不平顺参数分析以及轨道形变位置分析。 北京轨道测量仪后处理软件厂MP-GINS多基站模式处理功能,支持大型测绘项目中多基准站的联合解算与应用。
迈普时空MP-GINS软件提供的SDK开发包,为系统集成商和大型企业用户打开了二次创新的大门,使得高精度组合导航解算能力能够像积木一样被灵活拼接和调用。SDK包含了丰富的API接口函数、详尽的开发文档和典型的调用示例,开发者可以在Visual Studio等主流开发环境中,通过C++或C#等编程语言轻松调用MP-GINS的核、心功能。无论是需要将POS解算功能嵌入到无人机地面站软件中,实现飞行数据的闭环处理;还是希望开发一个基于云计算的批量数据处理平台,为用户提供SaaS服务;亦或是在无人驾驶仿真测试平台中集成高精度轨迹生成模块,SDK都能够提供坚实的底层支撑。这种开放式的合作模式,赋予了合作伙伴更大的技术自主、权和商业想象力,共同构建更加繁荣的高精度定位应用生态。
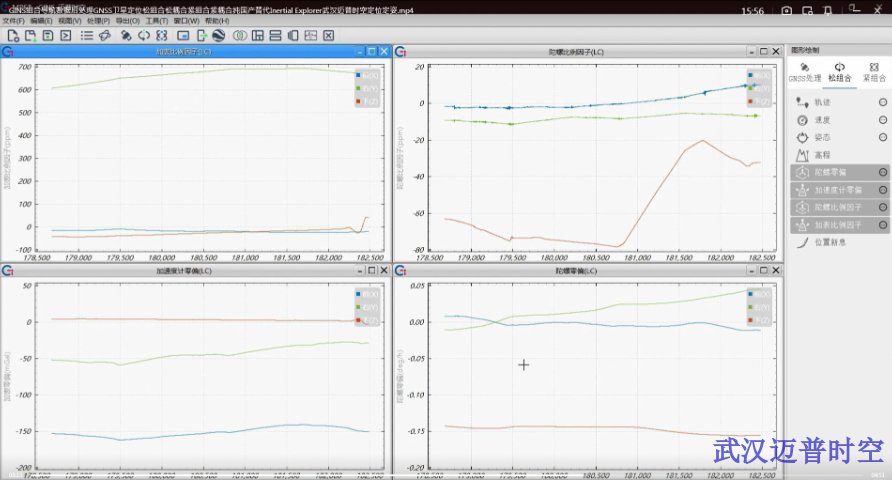
在移动测量系统集成过程中,IMU与车辆的相对安装角度是一个必须精确标定的关键参数,它直接关系到组合导航输出的姿态精度和位置准确性。迈普时空MP-GINS软件为此提供了便捷高效的车载IMU安装角自动标定功能,彻底改变了传统手工测量和繁琐计算的低效模式。用户只需在标定阶段按照软件提示,驾驶车辆完成一个包含直线加速和转弯的简单8字形轨迹,软件即可通过分析IMU和GNSS的测量数据,自动计算出精确的三个轴向安装偏差角度。这个过程将原本需要专业技术人员花费数小时才能完成的工作,缩短到十几分钟内即可自动完成,且标定精度远超人眼测量。同样,对于配备了双天线的GNSS系统,软件也提供了双天线安装角的自动标定功能,确保航向信息的准确获取。这些标定功能的智能化设计,大、大降低了移动测量系统的集成难度和技术门槛,让系统集成商能够快速完成设备部署,让蕞终用户能够更加专注于核、心业务数据的采集。InsRail轨道形变位置分析精确确定形变位置,里程定位误差不大于5厘米。
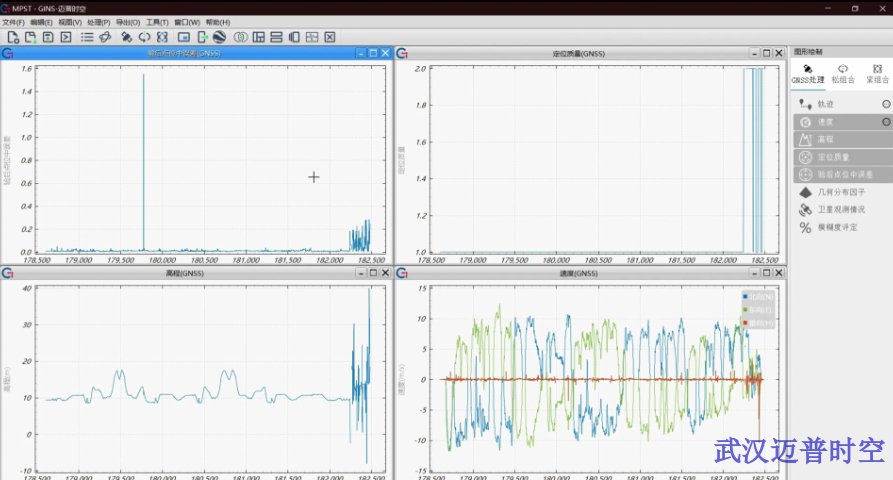
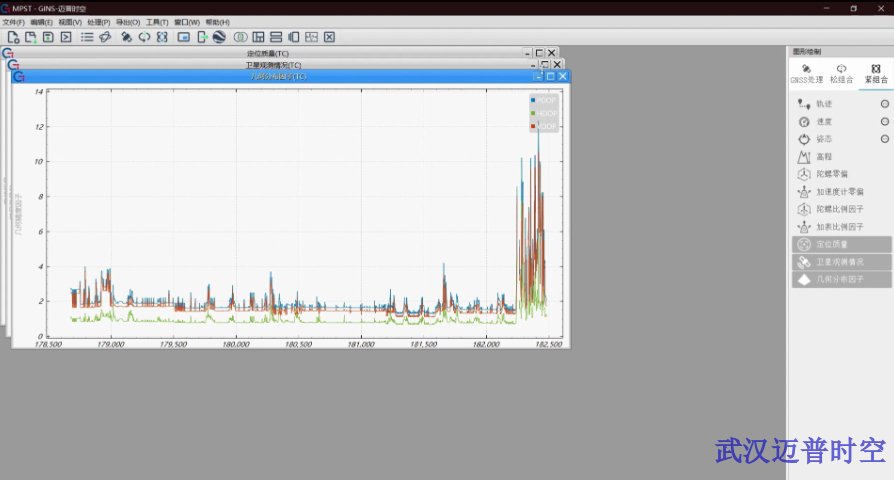
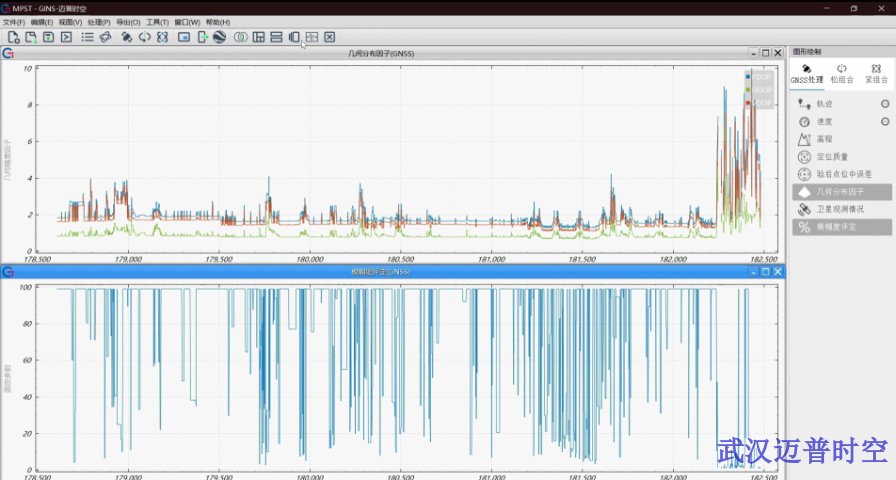
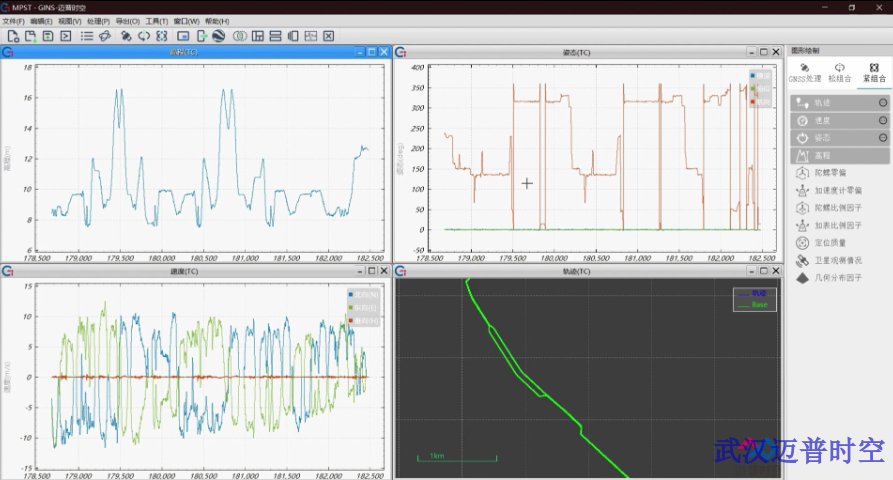
紧组合技术:两颗卫星也能精、准定位 在城市峡谷、茂密林荫或山区作业时,GNSS信号遮挡是困扰所有测绘工作者的核、心难题。MP-GINS采用业界领、先的紧组合处理模式,将GNSS原始观测值(伪距、载波相位)与IMU测量值进行深度融合,即使在可见卫星数量只有两颗的极端条件下,依然能够有效抑制惯导系统的发散,保持定位结果的可靠性和连续性。这种技术突破彻底改变了传统松组合模式下必须依赖四颗以上卫星才能解算的局面,为城市车载测量、无人机低空遥感等复杂场景提供了前所未有的定位保障,让每一次作业都能从容应对信号挑战。迈普时空InsRail处理速度极快,可靠性高,为轨道几何测量提供高效精确解决方案。西藏轨检小车后处理软件供应商
迈普时空InsRail多系统高精度GNSS解算模块,支持北斗与GPS系统动态差分后处理。新疆轨检数据精调软件厂家
迈普时空MP-GINS软件的车载运动约束功能,是针对陆上交通工具运动特性而开发的精度增强技术,它巧妙地将车辆的物理运动规律作为虚拟传感器融入组合导航解算中。在车辆正常行驶过程中,除非发生侧滑或跳跃,否则其侧向和垂向的速度理论上应为零,这就是所谓的非完整性约束。MP-GINS软件将这一先验知识作为强约束条件加入卡尔曼滤波器,当GNSS信号短时中断时,这些运动约束能够有效抑制惯导航向和水平姿态的误差漂移。同时,软件还利用车辆的速度脉冲信号或CAN总线数据作为里程计辅助,精确测量车辆的前向位移。这些车载辅助功能的综合运用,使得MP-GINS在城市峡谷、林荫道等信号频繁遮挡的环境中,依然能够输出比单纯依靠IMU积分平滑得多的轨迹,大、大提高了数据的内符合精度和外业采集的一次成功率。新疆轨检数据精调软件厂家
武汉迈普时空导航科技有限公司汇集了大量的优秀人才,集企业奇思,创经济奇迹,一群有梦想有朝气的团队不断在前进的道路上开创新天地,绘画新蓝图,在湖北省等地区的仪器仪表中始终保持良好的信誉,信奉着“争取每一个客户不容易,失去每一个用户很简单”的理念,市场是企业的方向,质量是企业的生命,在公司有效方针的领导下,全体上下,团结一致,共同进退,**协力把各方面工作做得更好,努力开创工作的新局面,公司的新高度,未来武汉迈普时空导航科技供应和您一起奔向更美好的未来,即使现在有一点小小的成绩,也不足以骄傲,过去的种种都已成为昨日我们只有总结经验,才能继续上路,让我们一起点燃新的希望,放飞新的梦想!