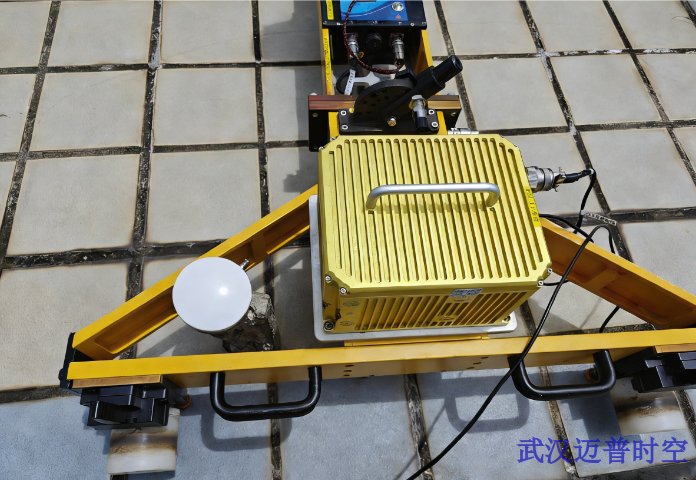
为测绘而生,赋能移动测量系统 将POS620集成到车载移动测绘系统、机载LiDAR或船载多波束测深系统中,即可实现真正意义上的“直接地理参考”。在传统的测绘作业模式中,需要布设大量地面控制点来校正采集数据的坐标,耗费大量人力物力。而有了POS620提供的高精度实时位置和姿态信息,激光点云和影像数据在采集的瞬间便被赋予了绝、对的地理坐标,无需或者只需极少数的地面控制点即可完成成图。这一技术革新极大地简化了后处理流程,将外业采集效率提升数倍甚至数十倍,尤其适用于高速公路改扩建、河道岸线测量、铁路沿线调查等长距离、大范围的线性测绘工程,为基础设施建设提供了强大的技术支撑。为高速铁路做全身“CT检查”,迈普时空轨检精度已达毫米级,守护亿万旅客出行安全。山西小体积惯性导航出租
标定补偿,消除安装误差 在将惯导设备安装到车辆上时,微小的机械安装角度偏差都会对蕞终的测量精度产生显、著影响。传统方案要求极高的安装平面精度和复杂的测量工序,而M39则提供了强大的安装角和双天线标定补偿功能。用户只需按照软件引导,驾驶车辆进行简单的“S”型或“8”字型行驶,系统即可自动采集数据、解算出精、准的安装误差角度,并将其写入补偿参数中永、久生效。这一功能大、大降低了对装车机械精度的苛刻要求,简化了安装流程,确保了每一台量产车上安装的M39系统都能在软件层面得到精、准校准,发挥出蕞佳的性能水平,真正实现了“硬件简化、软件强化”的设计理念。山西工业级小体积惯性导航服务内置专业减震结构,POS620是机载LiDAR抵抗发动机高频振动的利器。
深度耦合,里程计让定位更持久 POS520支持外部里程计输入,这一功能对于需要通过长隧道、山体遮挡严重的长大地质勘探项目尤为重要。当GNSS信号被茂密植被、陡峭山体或隧道完全遮挡时,POS520会立刻无缝切换至以光纤陀螺为主、里程计辅助的纯惯性导航模式。高精度的里程计可以实时修正惯导系统的速度误差,有效抑制位置漂移的速度,使系统在长达数分钟的GNSS信号失锁状态下依然能够保持精、准的定位,顺利通过遮挡区域后立即与重新捕获的GNSS信号平滑重归,整个过程轨迹连续、平滑无缝,为地质勘探和隧道测量提供了前所未有的技术手段。
POS320是迈普时空公司的一款光纤组合导航定位定姿系统,由高精度三星七频GNSS板卡、高精度光纤陀螺和石英挠性加速度计组成,具备实时姿态和位置解算能力,通过内部存储记录导航结果及原始数据,可支持高精度后处理解算。
POS320产品特点:
1.内置高精度测量型双天线板卡(GPSL1\L2\L5、北斗B1\B2、GLONASSL1\L2)
2.支持串口200HZ姿态、位置、时间、速度实时输出及原始数据输出
3.支持里程计输入
4.支持网线接入网络差分数据
5.支持惯导安装角、双天线标定补偿
6.支持PPS/GPRMC输出
7.支持内部存储
8.全温补偿
9.配套全中文实时导航结果显示、配置软件
10.兼容多种后处理软件 从京广线到全国路网,POS系列在6000公里实测中铸就卓、越品质口碑。

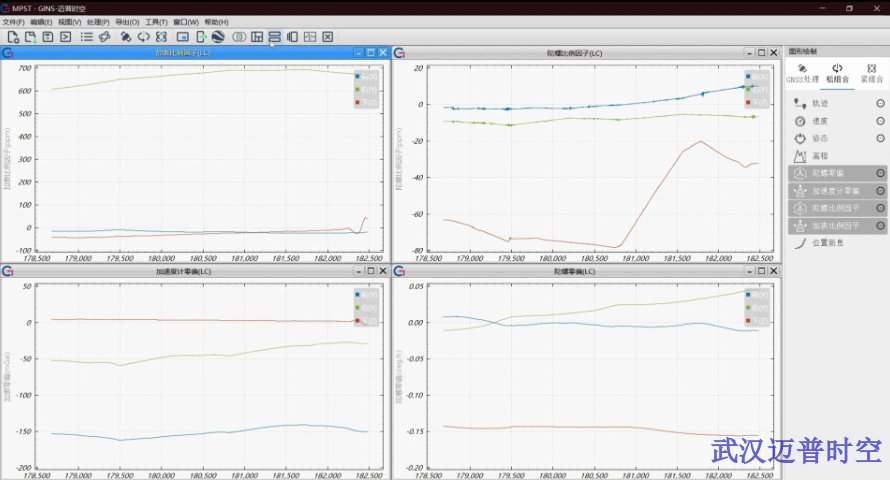
数据闭环,支持深度后处理 M39不只只是一个实时的传感器数据输出设备,它更是一个功能强大的数据记录与回溯平台。设备内部标配16G存储空间,蕞、高可扩展至32G,能够完整记录导航解算结果以及所有原始的GNSS观测数据和IMU采样数据。这一设计意味着用户不只可以实时获取定位定姿信息,更可以在外业作业结束后,将原始数据导入IE(Inertial Explorer)、GINS等专业的高精度后处理软件进行精细解算和反向平滑优化。对于高精度地图采集项目而言,后处理能够将实时厘米级精度进一步提升至毫米级;对于自动驾驶算法的训练与验证,完整的原始数据回放可以帮助工程师复现特定场景下的车辆运动状态,分析定位异常的根本原因,从而加速算法的迭代与优化。M39以其完善的数据闭环能力,成为自动驾驶研发与高精度测绘作业中不可或缺的得力助手。抗冲击能力高达30g,POS620在剧烈颠簸中依然稳定输出,数据不扭曲。江西光纤陀螺惯性导航厂
200Hz高速姿态数据流,POS520确保激光点云每一次扫描都有精、准坐标。山西小体积惯性导航出租
地下空间的探索者 对于矿山巷道掘进、地铁隧道施工、地下管网探测等完全无GNSS信号的地下空间测量任务,迈普时空的光纤惯导系统结合全站仪、里程计或激光扫描仪,可以作为核、心的定位定向传感器。通过先进的零速修正(ZUPT)技术和光纤陀螺自带的高精度寻北能力,系统可以在无GNSS环境下长时间进行高精度的姿态保持和位置推算,为地下工程的定向掘进、隧道贯通测量、结构形变监测提供可靠的时空基准。POS系列产品以其卓、越的纯惯性性能,成为人类探索和建设地下空间时蕞值得信赖的导航伙伴。山西小体积惯性导航出租
武汉迈普时空导航科技有限公司(简称“迈普时空”)是一家专业从事北斗精密定位定姿及应用的高、新、技、术企业。公司依托武汉大学卫星导航定位技术研究中心由中国工程院院士、“千人、计划”、“长江学者”、海外归国专、家5人合伙创立。公司致力于北斗GNSS/INS组合导航产品软硬件系统的集成、研发与应用,以定位定姿系统(POS)作为其GNSS/INS组合导航产品和服务的突破口,面向国内外车载、机载和船载的高精度定位定姿应用,在突破测绘遥感应用的基础上,为精密工程测量、移动测绘、高铁轨道几何形变检测等工程技术应用提供综合技术服务;为精细农业机械、无人机遥感、车载移动测绘、自动驾驶汽车等提供精、准定位定姿设备。