汽车电子测试模组的网络安全测试能力应对车载网络的信息安全威胁,支持 CAN 总线的消息注入攻击测试,验证 ECU 对伪造控制指令的防御能力;以太网测试模块可模拟 DoS 攻击、端口扫描等网络攻击手段,评估车载网络的防护策略。模组能检测 ECU 的固件加密强度,验证安全启动流程的有效性,确保符合 ISO/SAE 21434 网络安全标准。通过预设的攻击脚本库,测试工程师可快速执行标准化的网络安全测试,生成风险评估报告,为汽车电子的安全防护设计提供改进方向。车规级测试要求严苛?虎连产品为安全与稳定而生。浙江稳定汽车电子自动化测试
智能驾驶汽车电子测试模组需具备多传感器仿真能力,其视觉仿真模块可输出 LVDS 格式的虚拟摄像头信号,帧率达 60fps,分辨率支持 1920×1080;雷达仿真模块能生成点云数据,模拟不同距离、速度的目标物;激光雷达仿真则可提供百万点级的 3D 点云,模拟雨、雾等天气对传感器的影响。传感器数据同步精度控制在 1ms 以内,确保多传感器融合算法的测试有效性。通过与场景引擎(如 Prescan)对接,模组可复现海量真实交通场景,从各方面验证自动驾驶系统的感知与决策能力。浙江稳定汽车电子自动化测试汽车电子测试换型频繁?虎连模组快换方案助力产线柔性。
汽车电子测试模组的故障注入功能是验证系统容错能力的关键,可模拟导线短路、信号丢失等 20 余种故障模式。通过集成的继电器矩阵,模组能在毫秒级时间内切换电路状态,注入短路至电源 / 地、断路等硬件故障;软件层面则可篡改总线信号,模拟传感器漂移、通信错误等软故障。故障注入的时序控制精度达 1μs,能复现车辆行驶中的瞬态故障。在功能安全测试(ISO 26262)中,该功能用于验证电子系统在故障条件下的降级策略,确保达到预期的 ASIL 等级要求。
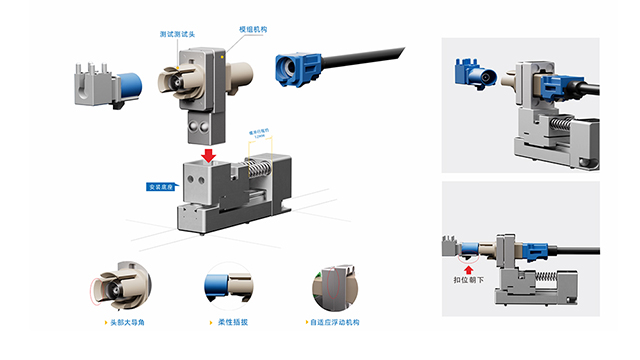
汽车电子测试转接头在自动驾驶系统测试中面临特殊挑战。为验证多传感器融合算法,转接头需同时传输摄像头的 LVDS 信号、毫米波雷达的射频信号、激光雷达的点云数据等多种类型信号,这要求转接头具备混合信号传输能力。在高动态测试场景中,如车辆加速、制动过程中的传感器响应测试,转接头需保持信号传输的连续性,避免因振动导致的瞬时断开。针对冗余设计的自动驾驶电子系统,转接头需支持双通道并行测试,确保主备系统的测试数据同步采集,为自动驾驶系统的功能安全与预期功能安全(SOTIF)验证提供可靠连接。汽车电子测试转接头的阻抗匹配,直接影响汽车电子高频信号的测试精度。
汽车电子测试模组的电磁兼容性(EMC)测试辅助功能帮助评估电子部件的抗干扰能力,通过脉冲发生器模块输出 ISO 7637 规定的电快速瞬变脉冲群(EFT)、浪涌等干扰信号,幅度可达 ±2kV。干扰注入方式支持耦合夹、直接注入等多种模式,模拟不同的干扰耦合路径。模组同步采集被测件在干扰下的输出信号,分析其性能变化,自动记录抗干扰阈值。配合 EMC 暗室,该功能可完成汽车电子部件的辐射发射与抗扰度测试,为产品的 EMC 认证提供前期验证。轻量化汽车电子测试转接头,减轻汽车电子测试设备的携带与操作负担。浙江稳定汽车电子自动化测试
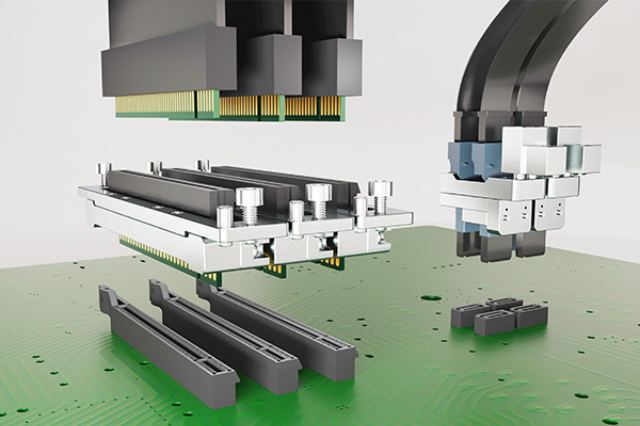
模块化汽车电子测试转接头,可通过更换插头适配不同汽车电子测试场景。浙江稳定汽车电子自动化测试
汽车电子测试模组的合规性测试模块内置国际与行业标准的测试流程,如 ISO 11898(CAN 总线)、ISO 14230(KWP2000)、SAE J1939(商用车网络)等。测试序列严格遵循标准中的测试条件与判定准则,确保测试结果的威严性。针对地区性法规,如中国的 GB/T 19951、欧盟的 ECE R10 等,汽车电子测试模组提供专门的测试模板,帮助企业满足不同市场的准入要求。合规性测试报告则自动生成符合标准要求的格式,减少人工整理的工作量,加快产品的认证进程。浙江稳定汽车电子自动化测试