- 品牌
- hictrl
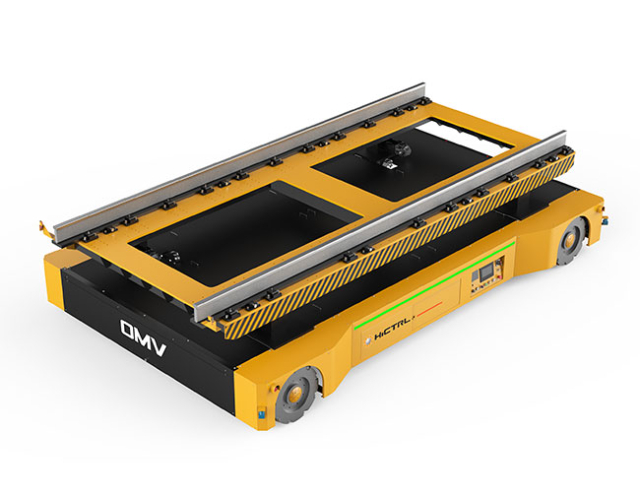
- 型号
- OMV
麦克纳姆轮与传统车轮在运动原理、性能特点、应用场景等方面存在差异,通过对比可更清晰地展现其优势与不足。在运动能力方面,传统车轮只能沿轴线方向移动,转向需要转弯半径,运动灵活性受限;而麦克纳姆轮可实现全向移动,无需转弯即可完成横向、斜向移动和原地旋转,在狭窄空间内的适应性更强。在承载能力方面,传统车轮与地面为线接触,承载能力较强,但压力分布不均;麦克纳姆轮与地面为点接触,接触点分布均匀,承载能力略低于同尺寸传统车轮,但通过优化结构设计可有效提升,现代麦克纳姆轮的承载能力已能满足多数工业场景需求。麦克纳姆轮重载AGV在汽车制造业的应用?库存麦克纳姆轮应用范围

深耕铁路运输领域,这款麦克纳姆轮可实现5-80吨级重载适配,完美契合铁路调车、装备检修等场景需求。优化轮体结构与承重设计,搭配耐磨聚氨酯辊子,提升在铁路货场粗糙地面的适应性,使用寿命达行业水平。凭借全向移动能力,可实现重载列车横向平移、原地旋转对位,配合5G+北斗定位技术,完成无人化调运与集装箱转运。在轨道装备检修场景中,可带动升降平台在车底狭窄空间灵活移动,实现部件拆装转运。有效压缩调车作业时间,减少人工操作,为铁路运输构建高效、安全、智能的全向移动生态。 常规麦克纳姆轮保养麦克纳姆轮重载AGV未来能否替代传统叉车?

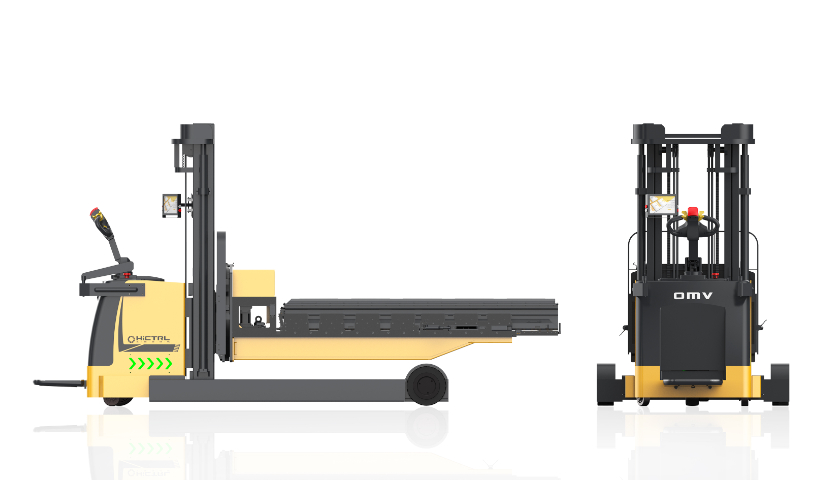
麦克纳姆轮作为一种具有全向移动能力的特殊车轮,原理在于斜向辊子与轮毂的巧妙组合。与传统车轮不同,麦克纳姆轮的轮毂周边均匀分布着一系列可自由转动的小辊子,这些辊子并非垂直于轮毂轴线,而是以 45° 角倾斜安装。当车轮旋转时,轮毂的驱动力会分解为两个垂直方向的分力:一个沿车轮滚动方向提供前进动力,另一个则垂直于滚动方向产生侧向推力。通过调整车辆四个麦克纳姆轮的转速和转向,利用力的合成与分解原理,即可实现前进、后退、横向平移、斜向移动以及原地旋转等多种运动模式,无需改变车身方向就能灵活调整位置。从结构设计来看,麦克纳姆轮主要由轮毂、斜向辊子、轴销、轴承和轮辋组成。轮毂通常采用铝合金或工程塑料一体成型,确保结构刚性的同时减轻重量;辊子表面多采用聚氨酯或橡胶材质,既保证了与地面的摩擦力,又能有效缓冲震动;轴销与轴承的配合则让辊子实现低阻力自由转动,减少能量损耗。根据辊子倾斜方向的不同,麦克纳姆轮可分为 A 型和 B 型,车辆需通过 A、B 型轮的对称布置,才能实现全向移动功能。这种结构设计既保留了传统车轮的承载能力,又突破了运动方向的限制,成为全向移动技术的载体。
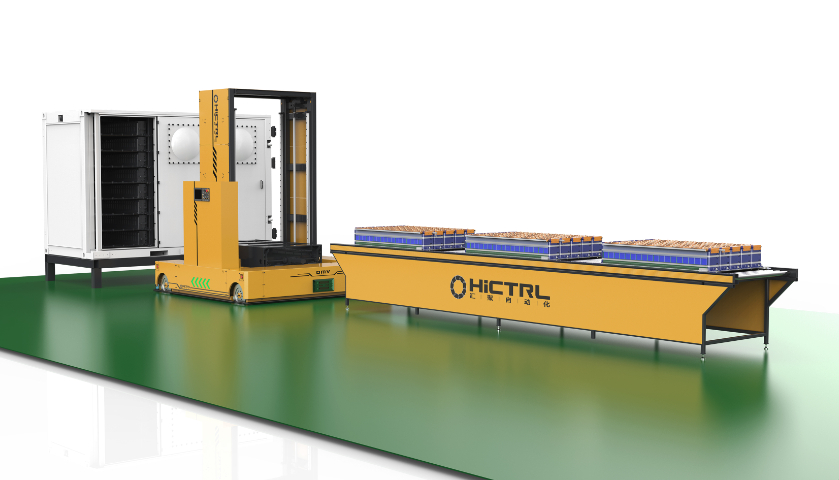
重构智慧铁路:麦克纳姆轮的重载运输情况麦克纳姆轮的技术优势与铁路运输“空间受限、精度要求高、重载需求大”的痛点高度契合,正推动铁路运输向智能无人化升级。在朔黄铁路黄骅港站,麦克纳姆轮智能调车平台可实现5000吨级重载列车的横向平移与对位,作业时间压缩20%,人工操作次数减少90%,年运能提升千万吨级;轨道检修场景中,其升降全向车能在车底狭窄空间自由调整姿态,实现电机、制动系统等大部件的拆装;集装箱货场里,重载AGV需7米宽通道即可完成20尺集装箱90度转向,让货场利用率提升至新高度。 麦克纳姆轮AGV存在哪些技术瓶颈?

在科技飞速发展的情况下,移动设备的灵活性和机动性成为了提升效率的关键因素。麦克纳姆轮,作为一种具有特殊性的轮式结构,正带领着全向移动技术的新潮流。麦克纳姆轮的设计独具匠心,其外缘周围安装了一圈倾斜 45° 的滚子,通常由 6 到 8 个滚子组成,这些滚子采用聚氨酯材料制成,具备高弹性、耐磨、抗撕裂和抗冲击等特性,确保了轮子的耐用性和出色性能。这种独特的结构使得麦克纳姆轮突破了传统轮式移动的方向限制,让设备能够在平面上实现任意方向的移动,包括前进、后退、横向平移、斜向移动以及原地旋转。洋工程制造中,麦克纳姆轮AGV如何解决复杂地形下的重载转运难题?便宜的麦克纳姆轮调整
麦克纳姆轮重载AGV的价格范围?库存麦克纳姆轮应用范围
多技术融合将拓展麦克纳姆轮的应用边界。一方面,它将与 “悬浮技术” 结合 —— 在车轮内部加入磁悬浮模块,减少辊子与轮辋的摩擦,降低噪音(可降至 40 分贝以下),同时提升转速(可达 500 转 / 分钟),适合对噪音和速度要求高的场景(如医院手术室、电子车间)。另一方面,它将与 “变形技术” 结合 —— 设计可折叠、可伸缩的轮辋结构,在需要通过狭窄通道时,车轮可收缩直径(减少占用空间);在需要提升越障能力时,车轮可展开辊子(增加接触面积),适合特种作业机器人(如废墟救援、地下管道巡检)。此外,绿色节能也将成为未来的重要发展方向。通过优化辊子的结构设计(如采用镂空式辊子,减少材料用量与重量),降低车轮的转动阻力,从而减少电机的能耗;研发 “能量回收” 功能 —— 在设备减速或下坡时,通过车轮的反向旋转带动电机发电,为电池充电,延长设备的续航时间(可提升 20%-30%),适合户外巡检机器人、物流 AGV 等需要长时间作业的场景。库存麦克纳姆轮应用范围

从工作原理来看,每个麦克纳姆轮都由电机驱动。当需要前进或后退时,四个轮子如同普通车轮一样同向旋转;若要实现 “蟹行”,即横向平移,例如向右平移,左侧的前后两轮向前旋转,右侧的前后两轮向后旋转,此时轮子的滚子与地面的摩擦力会分解为前后和横向两个方向的分力,两侧轮子产生的向右横向分力叠加,车辆便顺利完成平移;而原地掉头时,左前轮和右后轮向前旋转,右前轮和左后轮向后旋转,两侧轮子旋转方向相反,产生的推动力相互对立,车辆就只能原地旋转。麦克纳姆轮凭借其突出的全向移动能力,在众多领域展现出了巨大的应用价值。在工业生产中,AGV 搬运机器人配备麦克纳姆轮后,能够在工厂流水线狭窄的通道间自由穿梭,搬运物料,...
- 库存麦克纳姆轮租赁 2026-01-26
- 节能麦克纳姆轮生产过程 2026-01-25
- 自动化麦克纳姆轮耗材 2026-01-25
- 加工麦克纳姆轮电话 2026-01-25
- 特殊麦克纳姆轮解决方案 2026-01-25
- 通用麦克纳姆轮服务价格 2026-01-25
- 国产麦克纳姆轮处理方法 2026-01-25
- 省电麦克纳姆轮值多少钱 2026-01-25
- 什么是麦克纳姆轮有哪些 2026-01-25
- 整套麦克纳姆轮实时价格 2026-01-25


- 新能源麦克纳姆轮变速 2026-01-21
- 什么是麦克纳姆轮联系人 2026-01-21
- 库存麦克纳姆轮应用范围 2026-01-21
- 低温麦克纳姆轮售后服务 2026-01-21
- 加工麦克纳姆轮批发厂家 2026-01-21
- 哪些麦克纳姆轮产业 2026-01-21




- 小型储能入柜车以客为尊 01-26
- 机械储能入柜车保养 01-26
- 一体化储能入柜车按需定制 01-26
- 整套储能入柜车实时价格 01-26
- 大规模储能入柜车价格表 01-26
- 靠谱的储能入柜车利润是多少 01-26
- 环保储能入柜车运动 01-26
- 便捷式储能入柜车大小 01-26
- 哪些储能入柜车推荐货源 01-26
- 半自动储能入柜车调整 01-26