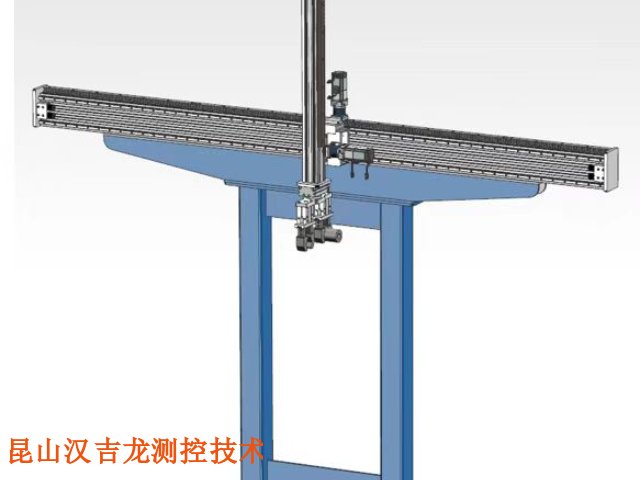
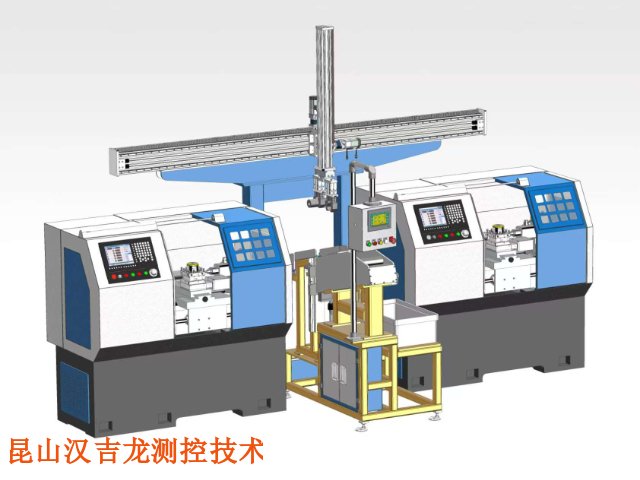
汉吉龙测控有限公司提供自动化智能机器人实验台在教学领域具有多方面的应用,涵盖了从基础教学到专业技能培养以及创新实践等多个层面,以下是具体介绍:基础课程教学机械原理与设计:通过让学生观察智能机器人实验台的机械结构,如关节连接方式、传动装置等,帮助学生理解机械原理中的杠杆、齿轮传动、连杆机构等知识。学生...
自动化智能机器人实验台基本参数
- 品牌
- VALENIAN/瓦伦尼安
- 型号
- VT-ZP500
- 类型
- 自动化实训台
- 加工定制
- 是
- 用途
- 教学实训
- 电机功率
- 2
- 外形尺寸
- 1200X1000X1500
- 重量
- 10
- 产地
- 苏州
- 厂家
- 昆山汉吉龙测控技术有限公司
自动化智能机器人实验台企业商机
安全与稳定性问题安全漏洞:软件可能存在安全漏洞,容易受到网络,从而影响实验台的正常运行,甚至导致机器人失控等安全。例如,***可能通过软件漏洞入侵实验台系统,篡改机器人的指令。稳定性问题:软件可能存在内存泄漏、程序崩溃等稳定性问题,影响实验的正常进行。例如,长时间运行软件后,由于内存泄漏导致系统资源耗尽,软件崩溃,使实验台无法继续工作。误操作:软件的操作界面设计不合理或用户对软件不熟悉,可能导致误操作,对实验台和机器人造成损坏。例如,用户在软件中误设置了机器人的运动参数,导致机器人在运行过程中与周围物体发生碰撞。数据处理问题的解决办法有哪些?如何自动化智能机器人实验台与软件配合时出现问题?针对兼容性问题。自动化为实验台带来机遇了吗?预测性自动化智能机器人实验台写论文
轨迹规划与优化方面模型预测操控算法(MPC):通过建立机器人的运动模型,预测机器人在未来一段时间内的运动轨迹,然后在每个操控周期内,基于预测结果和当前状态,优化计算出**优的操控输入序列,使机器人沿着**接近理想的轨迹运动,从而提高轨迹精度,减少运动偏差。基于样条曲线的轨迹规划算法:如采用B样条曲线等方法进行轨迹规划,可生成平滑、连续的运动轨迹,避免轨迹中的不连续点或突变,减少机器人在运动过程中的冲击和振动,保证机器人能够精确地按照预设轨迹运动,提高操作的平稳性和精度。增强系统鲁棒性方面滑模操控算法:在系统状态空间中定义一个滑动面,使系统在受到外部干扰或模型不确定性影响时,能迅速调整到滑动面上并保持在滑动面上运动,对系统的参数变化和外部干扰具有很强的鲁棒性,确保机器人在复杂的实验环境或存在干扰的情况下,仍能保持较高的操作精度。鲁棒操控算法:设计时充分考虑了系统模型的不确定性和可能存在的外部干扰,通过优化操控参数和结构,使系统在各种不确定因素下都能保持稳定的性能,保证机器人的运动精度不受影响,提高实验台在不同工况下的可靠性和准确性。 机电一体化自动化智能机器人实验台特点自动化智能机器人实验台厂家?

多传感器融合与反馈方面基于视觉反馈的操控算法:利用视觉传感器获取机器人当前的位置、姿态以及周围环境信息,与目标状态进行对比,然后根据偏差调整机器人的运动。视觉反馈能提供丰富的环境信息,使机器人能够实时感知并避开障碍物,精确地对准目标,常用于需要高精度操作的实验场景。多传感器融合操控算法:将多种传感器(如视觉、力觉、惯性传感器等)的数据进行融合处理,综合利用各传感器的优势,为运动操控算法提供更***、准确的信息。例如,力觉传感器可用于精确操控机器人与物体的接触力,在进行装配、抓取等操作时,结合视觉和力觉反馈的操控算法能使机器人更精确地完成任务,提高操作的准确性和成功率。提高实验台在不同工况下的可靠性和准确性。
提升自动化智能机器人实验台性能可以从以下几个方面入手:硬件升级更新**部件:将实验台的操控器升级为运算速度更快、处理能力更强的型号,可提高对机器人的操控精度和响应速度。把电机更换为扭矩更大、转速更高、精度更高的伺服电机,能使机器人的运动更加平稳、准确。对传感器进行升级,如采用精度更高的激光雷达、视觉传感器等,以提升机器人对环境的感知能力。优化机械结构:检查并加固实验台及机器人的机械连接部位,减少运动过程中的振动和松动,提高整体的稳定性。采用更传动装置,如高精度的滚珠丝杠、同步带等,可降低传动误差,提高运动传递的准确性。根据实验需求,对机器人的机械臂、关节等结构进行优化设计,增强其负载能力和运动灵活性。 智能实验台拓展机器人应用领域;

自动化智能机器人实验台硬件选型选用成熟的商业组件:优先选择市场上成熟的、经过验证的硬件产品,避免自行开发高成本的定制化硬件。例如,在选择处理器、传感器时,可选用主流的、性价比高的产品。考虑开源硬件平台:利用开源硬件平台,如Arduino、RaspberryPi等,这些平台具有丰富的资源和社区支持,可以迅速搭建实验原型,降低硬件开发成本。优化硬件配置:根据实验台的实际性能需求,合理配置硬件资源,避免过度配置造成资源浪费和成本增加。比如,根据数据处理量和运算速度的要求,选择合适性能的处理器和内存。软件研发利用开源软件和框架:使用开源的操作系统、机器人开发框架(如ROS)、算法库等,减少软件开发的工作量和成本。这些开源资源通常有活跃的社区支持,可方便地获取技术支持和更新。代码复用和共享:建立企业内部的代码库,鼓励研发人员在项目中复用已有的代码,提高代码的利用率,减少重复开发。采用敏捷开发方法:采用敏捷开发方法,迅速迭代,及时发现和解决问题,避免在开发后期因需求变更等原因导致的大规模返工。 自动化智能机器人实验台的性价比高不高呢?天津自动化智能机器人实验台
自动化智能机器人实验台的售后服务好不好呢?预测性自动化智能机器人实验台写论文
瓦伦尼安教学设备有限公司降低功能复杂的自动化智能机器人实验台的研发成本,可从以下几个方面入手:设计优化简化设计:对实验台的功能进行***梳理,去除不必要的复杂功能和组件,在满足**需求的基础上,使设计尽可能简洁。例如,若某些功能在实际应用场景中很少用到,可考虑舍去2。模块化设计:将实验台划分为多个**的功能模块,如机械结构模块系统模块、传感器模块等。这样可以提高模块的复用性,便于后续的维护和升级,同时也有利于不同团队并行开发,提高研发效率2。标准化设计:尽量采用标准化的零部件、接口和协议,如使用标准的电机、传感器、通信接口等。这样可以降低采购成本,增加零部件的通用性和互换性,减少定制化带来的高昂费用2。 预测性自动化智能机器人实验台写论文
与自动化智能机器人实验台相关的文章

新一代自动化智能机器人实验台供应商
- 气动系统自动化智能机器人实验台使用方法 2025-03-02
- 重载自动化智能机器人实验台实验 2025-03-02
- 6轴自动化智能机器人实验台原理 2025-03-02
- VALENIAN自动化智能机器人实验台贴牌 2025-03-01
- 自动生产线自动化智能机器人实验台厂家 2025-03-01
- HOJOLO自动化智能机器人实验台贴牌 2025-03-01
- 昆山自动化智能机器人实验台怎么样 2025-02-26
- 常见自动化智能机器人实验台哪里买 2025-02-26
- 江苏自动化智能机器人实验台连接 2025-02-26
- HOJOLO自动化智能机器人实验台企业 2025-02-25
- 维护自动化智能机器人实验台原理 2025-02-25
- 新一代自动化智能机器人实验台服务 2025-02-24
与自动化智能机器人实验台相关的产品

与自动化智能机器人实验台相关的新闻
-
工业自动化智能机器人实验台使用方法 2025-02-22 19:06:15常见类型工业机器人实验台:主要模拟工业生产中的机器人应用场景,如焊接、装配、搬运等,通常具有较高的负载能力和精度,可用于研究工业机器人的控制策略和优化生产流程。服务机器人实验台:侧重于机器人在服务领域的应用,如家庭服务、酒店服务、导览服务等,注重人机交互、环境感知和自主导航等功能的研究和开发。医疗机...
-
预测性自动化智能机器人实验台 2025-02-21 07:08:15自动化智能机器人实验台硬件选型选用成熟的商业组件:优先选择市场上成熟的、经过验证的硬件产品,避免自行开发高成本的定制化硬件。例如,在选择处理器、传感器时,可选用主流的、性价比高的产品。考虑开源硬件平台:利用开源硬件平台,如Arduino、RaspberryPi等,这些平台具有丰富的资源和...
-
江苏自动化智能机器人实验台企业 2025-02-21 17:06:45hojolo 结合分析目的故障诊断:要检测机器人是否存在故障及确定故障位置,可选择基于规则的诊断算法、故障树分析法,也可采用神经网络诊断算法、支持向量机等有监督学习算法,通过训练故障样本数据来实现准确诊断。性能评估:评估机器人的运动精度、性能等,可使用均方误差(MSE)、峰值信噪比(PSNR)、...
-
HOJOLO自动化智能机器人实验台保修 2025-02-20 00:21:02自动化智能机器人实验台通常是可以与不同软件配合的,以下从其与多种软件配合的类型及方式进行介绍:常见可配合的软件类型编程软件:实验台常与C、C++、Python等编程语言的开发软件配合,用于编写机器人的程序,实现各种动作和任务逻辑。如在ROS(机器人操作系统)环境下,常使用Python或C...
与自动化智能机器人实验台相关的问题
新闻资讯
产品推荐
-
质量设备安装对心校准仪怎么用
2026-04-29 -
无线联轴器不对中测量仪贴牌
2026-04-29 -

AS100对中仪定制
2026-04-29 -

AS联轴器振动红外对中仪服务
2026-04-29 -
电机轴对中激光仪电话
2026-04-29 -

专业百分表对中仪保养
2026-04-29 -
ASHOOTER激光联轴器对中仪批发
2026-04-29 -
专业级激光联轴器对中仪装置
2026-04-29 -

多功能无线激光对中仪哪家好
2026-04-29