- 品牌
- hictrl
- 型号
- omv
停车机器人是一种自动化设备,旨在解决城市停车难的问题。随着城市化进程的加快,停车难已成为困扰许多城市居民和管理者的一大难题。停车机器人通过先进的技术手段,提供了一种高效、智能的停车解决方案。停车机器人通常采用自动化导引系统(AGV),能够在停车场内自主导航,无需人工干预。它们能够自动识别空闲停车位,并将车辆停放到指定位置。当车主需要取车时,机器人会将车辆从停车位中取出,并送至取车点。总之,停车机器人作为一种新兴的停车解决方案,具有广阔的发展前景。随着技术的不断进步和成本的降低,停车机器人有望在更多城市得到广泛应用,为解决停车难问题提供有力支持。停车机器人的适用场景有哪些?常见停车机器人联系人
随着城市化进程的加速,车辆数量急剧增长,停车难已成为困扰城市居民的一大难题。传统停车场不仅占用大量土地资源,而且在高峰时段往往一位难求,给人们的出行带来了极大的不便。在此背景下,智能停车系统的出现如同一股清流,为城市交通管理带来了变化。智能停车系统集成了物联网、大数据、云计算等技术,通过智能化手段实现了停车资源的配置和利用。它利用安装在停车场内的传感器或摄像头等设备,实时监测车位占用情况,并将这些信息实时上传至云端服务器。车主只需通过手机APP或导航系统,就能轻松查询到周边空闲车位的位置、数量以及费用信息,节省了寻找车位的时间和精力。多功能停车机器人生产过程停车机器人的能源供应方式是什么?

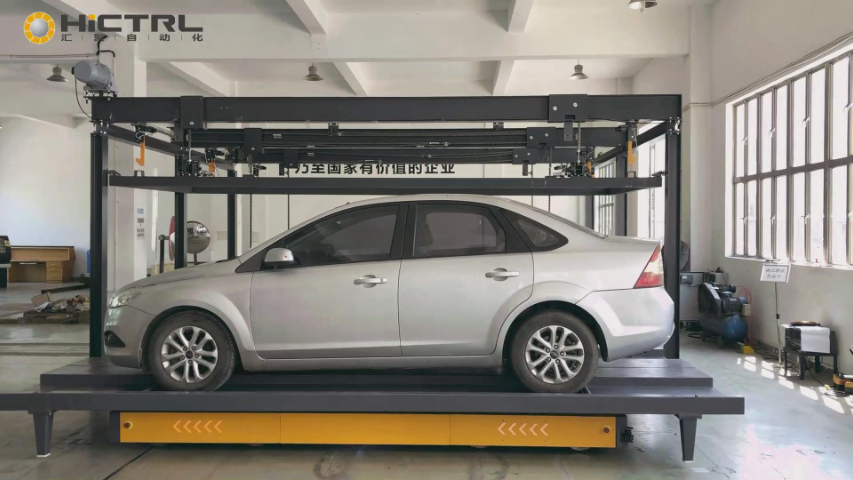
在高楼林立的老城区或空间受限的区域,停车难是一个普遍问题。停车机器人可以利用其自动导航和避障技术,在狭小的空间内自由穿梭。停车机器人还可以结合立体车位设计,节省停车空间,提高停车效率。企事业单位的停车场需要对内部车辆和来访车辆进行有序管理。停车机器人可以通过车牌识别等技术自动识别车辆信息,实现无人化收费和车辆管理。停车机器人还可以根据车辆进出情况和车位使用情况智能调度车位资源,优化停车场的利用效率。停车机器人在多个应用场景中都展现出了其独特的优势和价值。随着技术的不断进步和应用场景的不断拓展,停车机器人有望在未来实现更广泛的应用和普及。
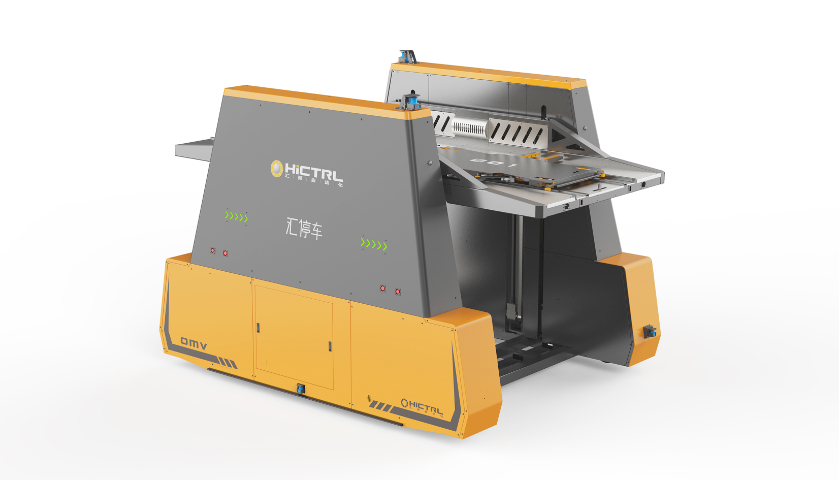
未来停车场的智能解决方案随着城市化进程的加速,停车难问题日益凸显。为了这一难题,停车机器人应运而生,成为未来停车场的智能解决方案。一、停车机器人设计理念停车机器人以智能化、自动化为设计理念,旨在通过机器人技术和物联网技术,实现停车场的无人化、智能化管理。这种设计理念不仅提高了停车效率,还降低了人力成本,为车主提供了更加便捷的停车服务。二、停车机器人的技术参数停车机器人采用高精度传感器、智能系统等技术,具备自主导航、避障等功能。其技术参数包括最大载重、行驶速度、精度等,均达到行业水平。这些技术参数保证了停车机器人在复杂环境下的稳定运行和作业。用户使用停车机器人的体验如何?
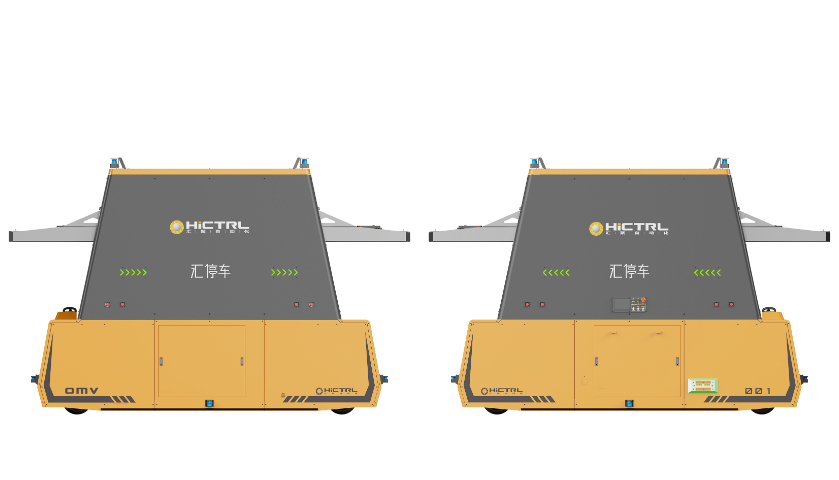
路径规划的目标是找到从当前位置到目标位置的短路径。常用的方法是A*算法,它考虑了路径的代价和启发式估计,并根据这些因素评估路径的优劣。机器人根据实时地图和位置信息,结合目标位置和环境条件,找到一条安全的路径。当停车机器人确定了路径后,它开始执行操作。机器人利用激光雷达和摄像头等设备进行导航,在行驶过程中通过实时感知环境并调整行动。机器人可以根据传感器数据对路径进行微调,以适应环境变化。一旦到达目标位置,机器人可以使用机械臂等设备完成停车操作,如开启车门或拨动驻车杆。停车机器人的维护成本如何?是否需要技术人员进行操作和维护?综合停车机器人调试
停车机器人在搬运车辆时,如何确保安全性和稳定性?常见停车机器人联系人
随着物联网、大数据和人工智能等技术的不断发展,停车机器人也在向智能化方向迈进。未来的停车机器人将能够自主学习和优化搬运策略,根据实时数据调整搬运方式和路径。这将进一步提高运输效率,降低能耗和成本,同时提升用户体验。促进绿色运输停车机器人的使用还有助于推动绿色运输的发展。由于采用了驱动技术和节能设计,停车机器人在搬运过程中能够减少能源消耗和排放。此外,通过优化运输路径和减少空驶时间,停车机器人还有助于降低整体运输过程中的碳排放量。综上所述,停车机器人作为未来汽车运输的力量,正在逐步改变着我们的运输方式和效率。随着技术的不断进步和应用场景的不断拓展,停车机器人有望在未来发挥更加重要的作用,为汽车生产和物流行业带来更大的变革和发展机遇。常见停车机器人联系人
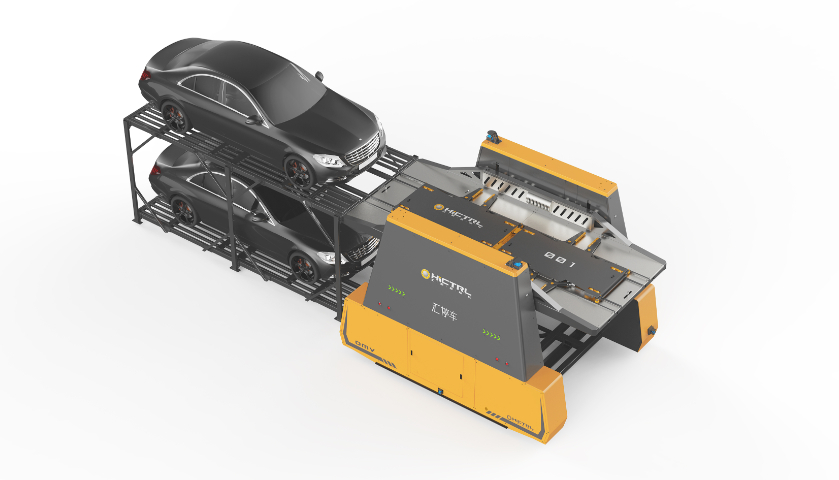
在繁忙的都市生活中,停车问题一直是困扰车主们的难题。然而,随着科技的飞速发展,停车机器人正逐渐成为解决这一问题的新宠。这些高度智能化的设备以其独特的优势,为城市停车管理带来了变化。停车机器人集成了导航技术、传感器技术,实现车辆的自动化停放和取出。车主只需将车辆停放在区域,停车机器人便会迅速的接过“重任”,将车辆安全的停放在停车位上。当车主需要取车时,停车机器人同样会迅速响应,将车辆送回到车主的身边。停车机器人一般多少钱?靠谱的停车机器人编号路径规划的目标是找到从当前位置到目标位置的短路径。常用的方法是A*算法,它考虑了路径的代价和启发式估计,并根据这些因素评估路径的优劣。机器人根据实时地图和位...
- 国内停车机器人厂家直销 2024-12-23
- 微型停车机器人价格查询 2024-12-23
- 购买停车机器人哪个好 2024-12-23
- 本地停车机器人值多少钱 2024-12-22
- 供应停车机器人价格多少 2024-12-22
- 智能停车机器人按需定制 2024-12-21
- 附近哪里有停车机器人售后服务 2024-12-21
- 哪些停车机器人利润是多少 2024-12-21
- 户外停车机器人执行标准 2024-12-21
- 户外停车机器人调试 2024-12-21

- 附近停车机器人优势 2024-12-20
- 户外停车机器人功效 2024-12-20
- 整套停车机器人产业 2024-12-20
- 进口停车机器人功效 2024-12-20
- 小型停车机器人解决方案 2024-12-19
- 哪里有停车机器人编号 2024-12-19





- 销售智能无人叉车哪个好 12-23
- 国内停车机器人厂家直销 12-23
- 低温麦克纳姆轮互惠互利 12-23
- 加工麦克纳姆轮调试 12-23
- 附近哪里有麦克纳姆轮现货 12-23
- 低温麦克纳姆轮拆装 12-23
- 使用智能无人叉车联系人 12-23
- 什么是储能入柜车电话 12-23
- 常见麦克纳姆轮调试 12-23
- 大型麦克纳姆轮电话 12-23