- 品牌
- hictrl
- 型号
- omv
随着物联网、大数据和人工智能等技术的不断发展,停车机器人也在向智能化方向迈进。未来的停车机器人将能够自主学习和优化搬运策略,根据实时数据调整搬运方式和路径。这将进一步提高运输效率,降低能耗和成本,同时提升用户体验。促进绿色运输停车机器人的使用还有助于推动绿色运输的发展。由于采用了驱动技术和节能设计,停车机器人在搬运过程中能够减少能源消耗和排放。此外,通过优化运输路径和减少空驶时间,停车机器人还有助于降低整体运输过程中的碳排放量。综上所述,停车机器人作为未来汽车运输的力量,正在逐步改变着我们的运输方式和效率。随着技术的不断进步和应用场景的不断拓展,停车机器人有望在未来发挥更加重要的作用,为汽车生产和物流行业带来更大的变革和发展机遇。停车机器人优势在哪?户外停车机器人调试
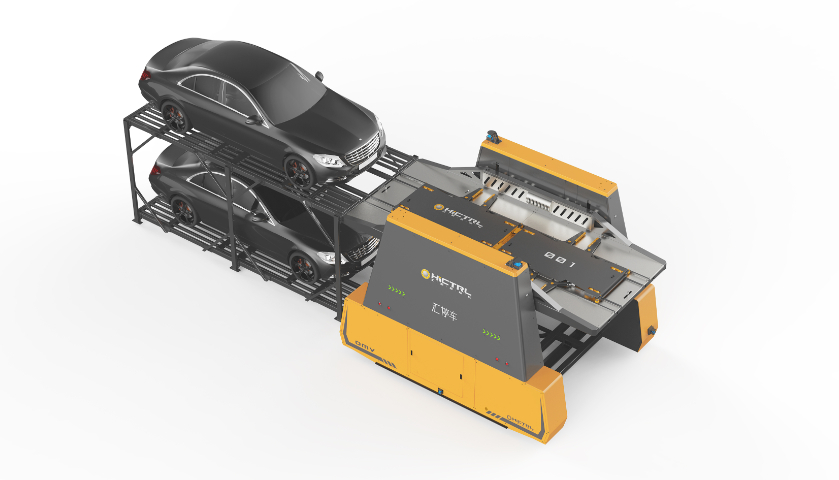
在高楼林立的老城区或空间受限的区域,停车难是一个普遍问题。停车机器人可以利用其自动导航和避障技术,在狭小的空间内自由穿梭。停车机器人还可以结合立体车位设计,节省停车空间,提高停车效率。企事业单位的停车场需要对内部车辆和来访车辆进行有序管理。停车机器人可以通过车牌识别等技术自动识别车辆信息,实现无人化收费和车辆管理。停车机器人还可以根据车辆进出情况和车位使用情况智能调度车位资源,优化停车场的利用效率。停车机器人在多个应用场景中都展现出了其独特的优势和价值。随着技术的不断进步和应用场景的不断拓展,停车机器人有望在未来实现更广泛的应用和普及。大规模停车机器人大小停车机器人的发展趋势如何?

停车机器人的优势显而易见。首先,它们能够大幅提高停车效率,缩短停车和取车的时间,为车主们节省宝贵的时间成本。其次,通过优化停车场的布局和停车位的使用,停车机器人能够增加停车数量。。此外,它们还能够减少环境污染,降低车辆存取车期间的能耗和尾气排放,为城市的可持续发展做出贡献。然而,停车机器人的发展也面临着一些挑战。例如,机器人的机械结构复杂,需要高精度的设计和制造,导致成本较高。同时,停车机器人的安全性和可靠性也需要,以确保车辆在停放和取出过程中的安全。此外,停车机器人的普及还需要得到政策法规的支持和推动,以及社会各界的认可和接受。
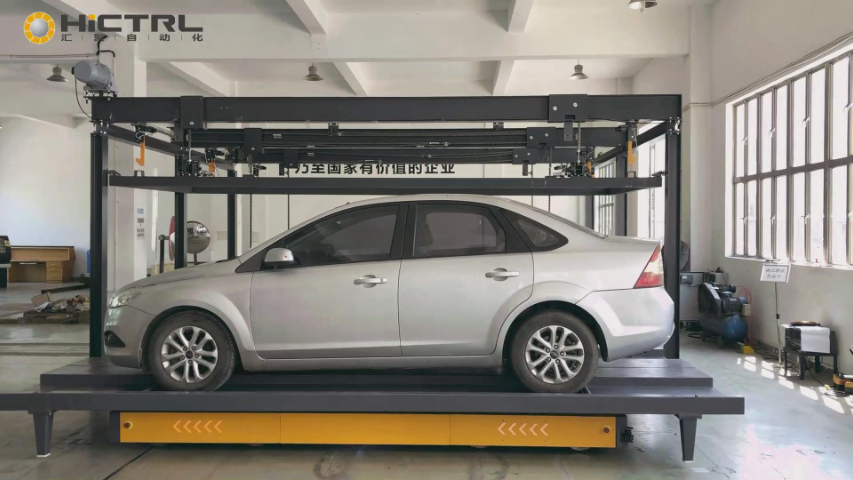
停车机器人通过结合自主研发的自动导航系统、多车自动调度系统和手机APP,实现全程无人全自动泊车、取车。车主只需将车驶入车库门内,自动泊车机器人就可以将车稳稳停好;取车时,车主只需通过APP发出取车指令,自动泊车机器人就会将车送到车主面前。整个过程无需人工干预,提高了停车效率。
停车机器人广泛应用于商业停车场、公共停车场等场所。在商业停车场中,停车机器人可以节省大量的人力资源,提高停车场的运营效率。在公共停车场中,停车机器人可以提高城市停车资源的利用率。 相比传统停车方式,使用停车机器人会增加多少成本?
停车机器人的优势1.提高效率:停车机器人能够大幅度提高汽车运输的效率。相比传统的人工或机械搬运方式,停车机器人能够实现更准确的搬运作业,减少等待时间和人工成本。2.降低成本:随着技术的不断成熟和规模化应用,停车机器人的成本将逐渐降低。同时,由于其能够减少人工干预和降低运输过程中的损耗,因此有望为汽车运输行业带来的成本节约。3.减少污染:停车机器人通常采用电力驱动,相比传统的燃油驱动设备,其排放更少,对环境的影响更小。此外,通过优化运输路径和减少等待时间,停车机器人还能进一步降低能源消耗和碳排放。停车机器人的用户评价。工业停车机器人调整
停车机器人是如何工作的?户外停车机器人调试
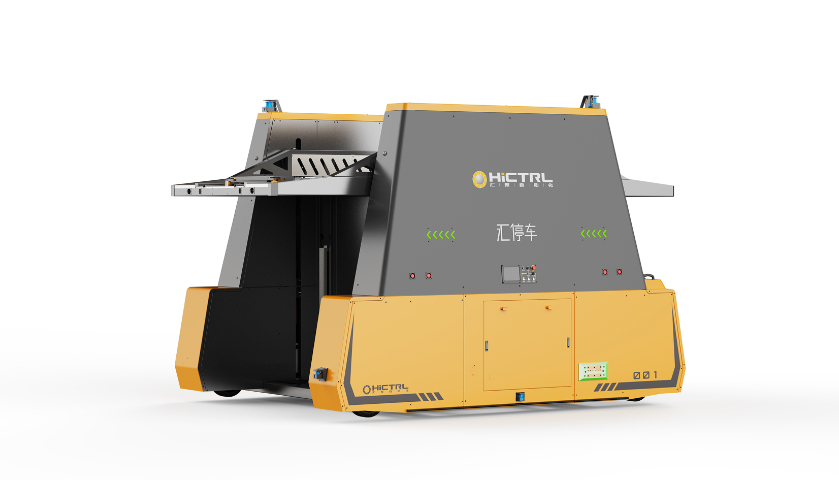
停车机器人作为智能停车解决方案的重要组成部分,正逐渐在城市停车管理中发挥重要作用。以下是对停车机器人的详细介绍:一、工作原理与技术特点工作原理停车机器人通过集成的传感器、摄像头和导航系统,能够识别车辆的位置和状态。车主只需将车辆驶入停车区域,机器人便会自动接过车辆,并将其安全地停放至预定的停车位。取车时,车主通过手机APP或停车场管理系统发出指令,机器人便会将车辆送回至取车区域。技术特点高精度:采用导航和技术,确保机器人在搬运过程中的准确性和稳定性。智能调度:通过自主研发的调度系统,机器人能够分配和管理停车位,避免车位浪费和拥堵。灵活性强:采用麦克纳姆全向轮等技术,使机器人在狭小空间内也能自由穿梭和停放车辆。安全性高:机器人具备多重安全防护措施,如紧急停止按钮、碰撞检测等,确保在搬运过程中的安全性。户外停车机器人调试
在智慧园区建设浪潮下,物联网集成停车机器人作为园区静态交通管理的枢纽,实现了停车服务与园区整体智能化系统的深度融合,构建“停车-安防-调度-服务”一体化管理生态。该产品不仅具备高效泊车功能,更集成了物联网、大数据、人工智能等前沿技术,可与园区门禁系统、访客系统、监控系统、能源管理系统无缝对接,实现数据互通与智能联动。产品价值在于构建全场景智慧服务体系:车主进入园区后,通过车牌自动识别即可触发停车预约与路径引导,机器人提前做好接车准备;停车过程中,系统实时监测车库环境、车位状态与车辆安全,同步联动安防监控确保园区安全;取车时,可通过园区APP实现一键取车、无感支付,并联动园区导航系统为车主规划离...
- 低温停车机器人技术指导 2026-01-30
- 国产停车机器人怎么样 2026-01-25
- 便宜的停车机器人优势 2026-01-20
- 销售停车机器人大概价格多少 2026-01-20
- 自动化停车机器人哪个好 2026-01-17
- 新能源停车机器人推荐货源 2026-01-17
- 直销停车机器人标准 2026-01-17
- 整套停车机器人哪个好 2026-01-17
- 整套停车机器人网上价格 2026-01-17
- 小型停车机器人用户体验 2025-12-25


- 一体化停车机器人保养 2025-12-18
- 销售停车机器人系列 2025-12-18
- 哪里有停车机器人网上价格 2025-12-18
- 小型停车机器人电话 2025-12-18
- 哪里有停车机器人变速 2025-12-18
- 绿色环保停车机器人以客为尊 2025-12-18



- 销售麦克纳姆轮服务价格 01-30
- 特种停车机器人批发厂家 01-30
- 常见麦克纳姆轮方案设计 01-30
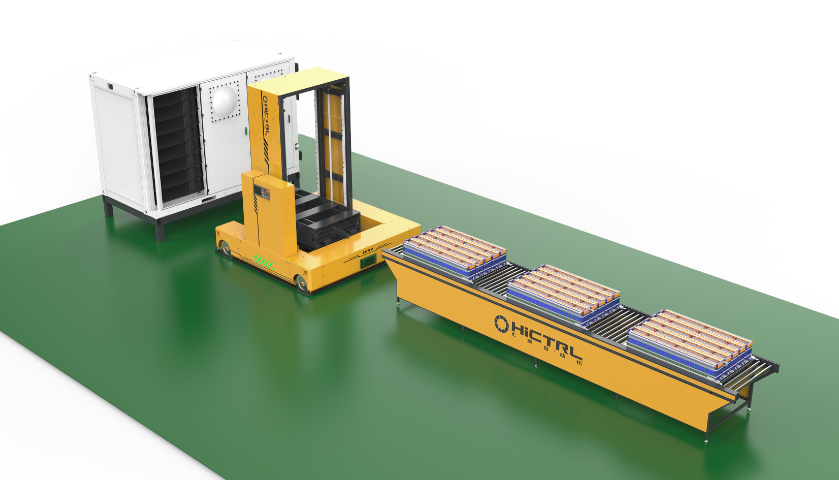
- 国产储能入柜车定义 01-30
- 靠谱的储能入柜车规格 01-30
- 户外麦克纳姆轮网上价格 01-30
- 自动化储能入柜车技术指导 01-30
- 销售麦克纳姆轮一体化 01-30
- 国产麦克纳姆轮采购信息 01-30
- 特种麦克纳姆轮生产过程 01-30