所述微调装置2包括一蜗轮蜗杆机构21、一电子测量仪22以及一微调平台23;所述微调平台23设于所述电动伸缩双直线导轨11上端的尾部,所述微调平台23的末端向上设有一延伸部231;所述蜗轮蜗杆机构21设于所述微调平台23的前端;所述电子测量仪22的一端抵接于所述延伸部231,另一端抵接于所述蜗轮蜗杆机构21。所述蜗轮蜗杆机构21包括一横向蜗杆211、一蜗轮(未图示)以及一位移调节把手212;所述横向蜗杆211的一端与所述激光红外线接收挡板5的背面固接,另一端与所述电子测量仪22抵接;所述位移调节把手212与所述蜗轮固接;当旋转所述位移调节把手212时通过所述蜗轮联动所述横向蜗杆211进行横向位移。激光位移传感器是一种非接触式的测量设备,利用激光技术进行精确的距离测量。温州激光位移传感器设备生产
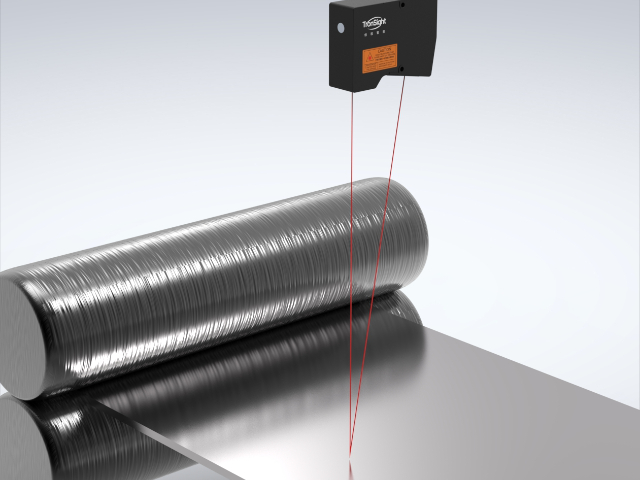
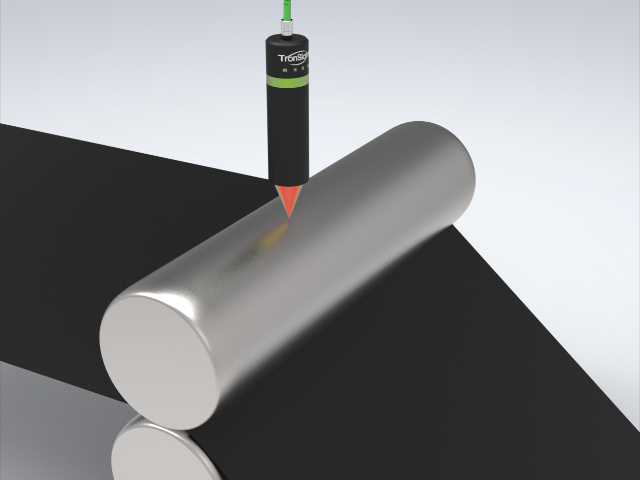
系统的整体结构如图1所示。从图1可以看出,整个系统由上位机、激光位移传感器和平台运动控制系统三部分组成。激光位移传感器由激光位移控制器、感测头和监视器组成。平台运动控制系统主要由平移台运动控制器、驱动器、电源和二维电动平移台组成。系统的部分设备如图2所示。图2列出了激光位移传感器感测头和二维电动平移台。图3为激光位移传感器感测头测量对象物原理。参考距离根据被测对象物的变化可测量范围为2 mm,基准距离为30 mm,传感器显示解析度为0.3μm,线性度达到满量程的0.3%,即精度达到6μm。苏州激光位移传感器行情它可以实时测量物体的位移,并提供高精度的测量结果。

与通常在室内使用的工业检测或实验研究检测激光位移传感器不同的是,用于道路检测的激光位移传感器要面临使用条件变化多、使用环境更苛刻且无固定规律可循等诸多问题。公知的路面按铺设材料分为沥青路面和水泥路面。对于水泥路面,一般来讲路表面的反射强度比较均匀,但也存在特殊的局部镜面和高反射率的材料;另外,水泥路面还存在经过特殊处理的人工刻制沟槽(通常称为路面构造深度),这些人工刻制的沟槽可用于提高路面抗滑性能。以上这些情况在采用工业检测或实验研究检测激光位移传感器检测路面指标,特别是检测路面构造深度时,就必须采取必要的措施以减小或消除各种不利因素造成的影响。对于沥青路面,情况就更为复杂,除了路面存在泛油、各种污染物(如油物等)和路面修补等情况外,沥青道路表面的级配设计变化使路面的颗粒大小不一、路面使用材料的不同、结构上的构造深度、路面上的标志线以及路面长期使用后路面的磨光等都对激光位移传感器的检测精度产生影响。
随着科学技术的迅猛发展,具有非接触、高精度、稳定性好、可自动化及易于与计算机相结合等特点的激光位移检测技术在自动检测、机器人视觉、计算机辅助设计与制造等领域得到了广泛的应用,已将逐渐取代传统的接触式检测技术,成为现代检测技术很重要的手段和方法。非接触式激光平面检测系统主要利用激光位移传感器与平台运动控制系统来检测对象物平面平整度。位移传感器用来测量目标物体的距离,按与对象物的接触类型它分为两类:主要有使用差动电压等形式的接触式与使用磁场、超声波、激光等形式的非接触式。由于非接触式激光位移传感器具有高精度表面扫描的特点,系统选择基恩士公司的LT一9001Series型激光位移传感器,该激光位移传感器可以对任何对象物进行高精密度的位移测定,例如可以对微细工件、粗面工件的高度进行测定,还可以测量电路板上的焊锡以及测定透明体的表面和厚度。平台运动控制系统选择丹纳赫公司的ULTIMAC—G型控制器和二维电动平移台。云南丽江天文工作站2.4mm天文望远镜终端的拼接CCD相机为了得到更清晰的天体图像,将采用该非接触式激光平面检测系统,对拼接CCD相机平面平整度进行检测。它具有较长的使用寿命,能够长时间稳定地运行。
根据物体表面的散射特性,可确定入射光与成像透镜光轴的夹角。激光入射到被测物体表面,散射光强度成椭球型分布[6]。当入射光垂直入射时,α值越小,成像透镜接收到的散射光强度越大,但角度过小对探测器分辨率要求及制作工艺上都有较高难度,综合考虑取α值为21.8°,由仪器的测量范围±10mm可得到物距为53.85mm。通常情况下,库克三元组有很好的成像效果[7],因此选择库克三元组作为成像透镜的初始结构进行优化。优化过程中以各个镜片表面的半径为变量,控制厚度在适当范围,同时将像面与光轴的夹角β设为可变,采用CODEV的横向像差与波像差相结合的方式进行优化,得到下面的结果。图3为优化后的成像光学系统它可以实时监测物体的位移变化,提供准确的数据支持。宁德激光位移传感器的用途和特点
激光位移传感器可以实现微米级的位移测量。温州激光位移传感器设备生产
提高采样频率,利用前一次采样得到的结果,分析判断物体表面的反射光强,然后适时调整激光器发射的激光束的强度,以减小由于反射光强变化大而产生的测量误差。这种方法在很大限度上改进了由于饱和产生的误差,但仍然无法从根本上解决由于物体表面在激光光斑散射的小范围内的反射率不同以及由于存在表面颗粒变化导致成像光斑不对称等因素产生的测量误差。本实用新型的目的在于对现有技术存在的问题加以解决,提供一种结构合理、使用方便、可减小甚至消除路面检测过程中由于成像光斑不均匀或不对称产生的测量误差,进而有效提高位移检测精度的道路检测激光位移传感器。温州激光位移传感器设备生产