根据本发明实施例的激光位移传感器主要包括激光器(例如,可以是CN1 06855391B5激光二极管)1、聚焦透镜2、窗口玻璃3、带通滤光片5、成像物镜(也可称为接收物镜)6、感光元件7以及反光元件8。其中,该激光位移传感器用于对被测物体4进行测量。在图1所示的结构中,省略了激光位移传感器的外壳。实际上,上述窗口玻璃3可以设置在激光位移传感器的外壳上,供激光器所发出的光通过。激光位移传感器的工作过程如下:由激光二极管1发射的激光束通过聚焦透镜2聚焦、窗口玻璃3滤光后,照射在被测物体4的表面形成一个测量光斑,激光束可以垂直入射到被测物体4表面(即垂直入射),也可与被测物体4表面成一定的角度(即斜入射)。该测量光斑由成像物镜6成像,并在感光元件7形成测量信号。激光位移传感器可以用于测量机械零件的尺寸和形状。珠海激光位移传感器产品原理
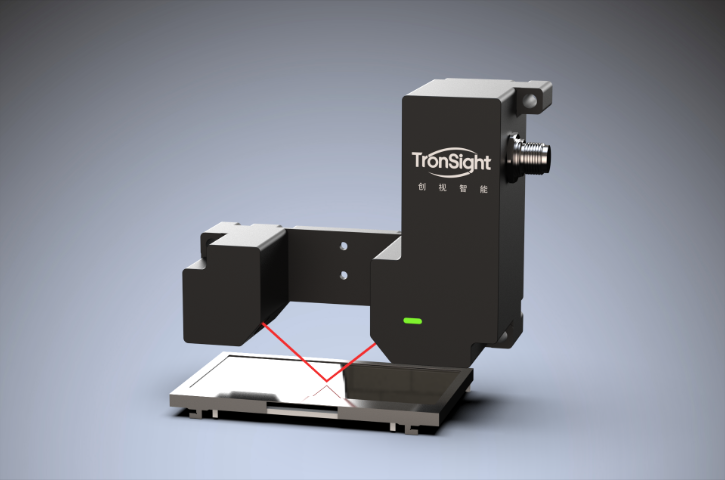
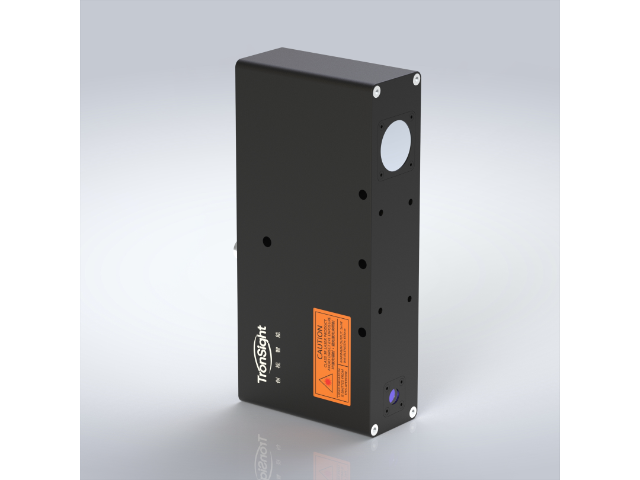
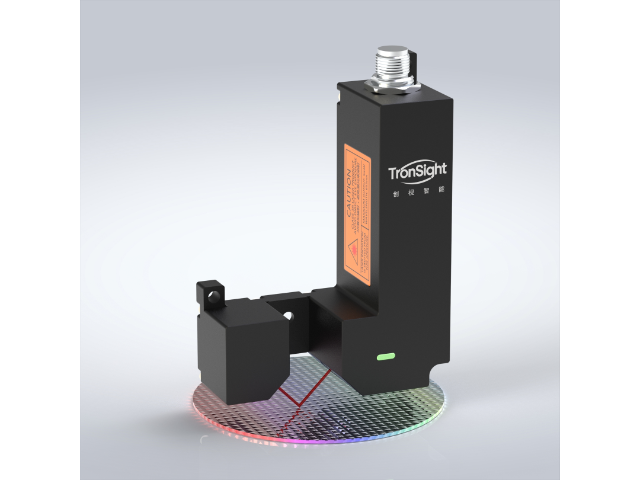
系统的整体结构如图1所示。从图1可以看出,整个系统由上位机、激光位移传感器和平台运动控制系统三部分组成。激光位移传感器由激光位移控制器、感测头和监视器组成。平台运动控制系统主要由平移台运动控制器、驱动器、电源和二维电动平移台组成。系统的部分设备如图2所示。图2列出了激光位移传感器感测头和二维电动平移台。图3为激光位移传感器感测头测量对象物原理。参考距离根据被测对象物的变化可测量范围为2 mm,基准距离为30 mm,传感器显示解析度为0.3μm,线性度达到满量程的0.3%,即精度达到6μm。常州激光位移传感器工厂无论是在工业生产、医疗诊断还是科学研究,它都发挥着巨大作用,为我们提供了准确而可靠的测量数据。

要想在工作范围内得到好的光斑质量,可采用柱面镜或非球面实现,另外波前编码和切趾法在延拓焦深方面也有很好的效果[3,4],但这样的光学系统相对较复杂,元件较多,不宜装调,成本也会增长。因此,在精度允许的情况下,可考虑全部采用球面镜,不考虑焦深延拓,用变倍的方法实现在40、45、50、55、60mm物距处光斑大小尽量均匀一致。根据光谱分布,设定中心波长权重为3,边缘波长权重为1。要消掉少量的色差,系统至少需要两片镜片。根据以上要求选定了一个初始结构,经过优化得到以下best设计结果。图2为优化后的镜头结构(像距在50mm处)。表1为effective工作范围内轴上视场的光斑大小分布。
加工-测量-再加工-再测量是非球面加工的必要过程。非球面透镜的高精度检测不仅包括非球面表面形状的检测,还包括非球面中心偏差的测量。要求非球面透镜的形状误差在几厘米到几十厘米的范围内小于1μm。受现有冷加工工艺、车床运动误差、磨削力变形及检测误差的限制,加工的非球面光学元件会产生一些质量缺陷,无法保证跨尺度的产品满足高精度要求。为了使非球面透镜表面形状误差、中心偏差等参数满足设计精度要求,往往需要利用被加工非球面工件的中心偏差检测信息进行多误差校正和补偿加工。高精度激光位移传感器具有较高的精确度,能够满足精密测量的需求。
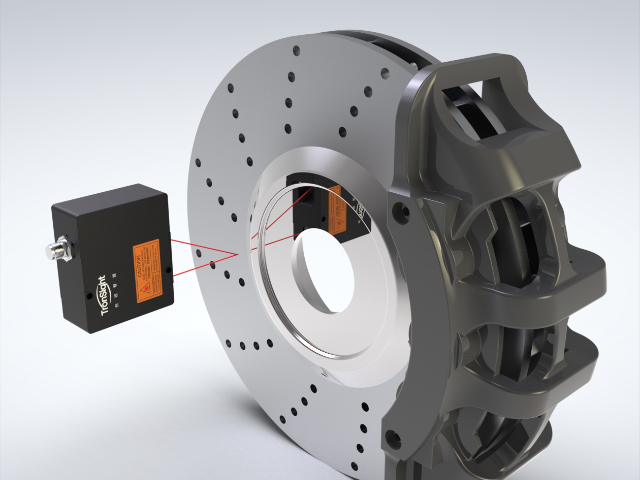
针对目前国内自主研制的激光位移传感器精度低,测量范围小等问题,提出了一种采用光学设计软件预先仿真整个激光位移传感器光学系统的方法。在分析系统各部分的光学特性的基础上,结合具体要求设计了一个激光位移传感器的光学系统,其工作范围为(50±10)mm。采用系统分割的方法,将整个光学系统分为两部分进行设计,No.1部分是激光束的整形透镜,要求在有效的工作范围内得到小而均匀的出射光斑,设计结果表明,在测量范围内,光斑大小能够控 制在10-1mm量级;另一部分是被测面散射光接收的成像物镜,该系统的特点是物面和像面相对于光轴都有一定的角度,实验结果表明其成像满足Scheimpflug条件。 激光位移传感器在汽车行业的应用案例。珠海激光位移传感器产品原理
这些传感器具有广泛的应用领域。它们可以用于测量各种材料的位移,包括金属、塑料和液体等。珠海激光位移传感器产品原理
带通滤光片,设置于成像物镜的入射光路上。聚焦透镜,设置于激光器的出射光路上。可选地,上述感光元件为线阵感光元件,线阵感光元件的多个感光单元沿直线排列,该直线的延伸方向为多个感光单元的主要排列方向。上述也可以是感光元件为面阵感光元件,面阵感光元件包括以矩形排列的多个感光单元,面阵感光元件的长边延伸方向为多个感光单元的主要排列方向。此外,上述成像物镜可以为单一镜片,且成像物镜的物侧面和像侧面皆为非球面;或者,成像物镜为多个透镜组成的透镜组。珠海激光位移传感器产品原理