如权利要求2所述的激光位移传感器检验校准装置,其特征在于:所述微调装置包括一蜗轮蜗杆机构、一电子测量仪以及一微调平台;所述微调平台设于所述电动伸缩双直线导轨上端的尾部,所述微调平台的末端向上设有一延伸部;所述蜗轮蜗杆机构设于所述微调平台的前端;所述电子测量仪的一端抵接于所述延伸部,另一端抵接于所述蜗轮蜗杆机构。如权利要求3所述的激光位移传感器检验校准装置,其特征在于:所述蜗轮蜗杆机构包括一横向蜗杆、一蜗轮以及一位移调节把手;所述横向蜗杆的一端与所述激光红外线接收挡板的背面固接,另一端与所述电子测量仪抵接;所述位移调节把手与所述蜗轮的中心固接。高精度激光位移传感器具有较高的灵敏度,能够检测微小的位移变化。赣州激光位移传感器货真价实

进一步地,所述可伸缩导轨包括一电动伸缩双直线导轨、一No.1支撑件、一第二支撑件、一滑动轮、一伸缩制动开关以及一控制面板;所述No.1支撑件安装在所述电动伸缩双直线导轨固定端的底部,所述第二支撑件安装在所述电动伸缩双直线导轨可伸缩端的底部;所述滑动轮设于所述第二支撑件的底部;所述伸缩制动开关设于所述第二支撑件的侧面;所述控制面板与所述电动伸缩双直线导轨电连接。进一步地,所述微调装置包括一蜗轮蜗杆机构、一电子测量仪以及一微调平台;所述微调平台设于所述电动伸缩双直线导轨上端的尾部,所述微调平台的末端向上设有一延伸部;所述蜗轮蜗杆机构设于所述微调平台的前端;所述电子测量仪的一端抵接于所述延伸部,另一端抵接于所述蜗轮蜗杆机构。福州激光位移传感器厂家激光位移传感器在新能源锂电行业的应用案例。

要想在工作范围内得到好的光斑质量,可采用柱面镜或非球面实现,另外波前编码和切趾法在延拓焦深方面也有很好的效果[3,4],但这样的光学系统相对较复杂,元件较多,不宜装调,成本也会增长。因此,在精度允许的情况下,可考虑全部采用球面镜,不考虑焦深延拓,用变倍的方法实现在40、45、50、55、60mm物距处光斑大小尽量均匀一致。根据光谱分布,设定中心波长权重为3,边缘波长权重为1。要消掉少量的色差,系统至少需要两片镜片。根据以上要求选定了一个初始结构,经过优化得到以下best设计结果。图2为优化后的镜头结构(像距在50mm处)。表1为effective工作范围内轴上视场的光斑大小分布。
如权利要求1所述的激光位移传感器检验校准装置,其特征在于:所述可伸缩导轨包括一电动伸缩双直线导轨、一number one支撑件、一第二支撑件、一滑动轮、一伸缩制动开关以及一控制面板;所述number one支撑件安装在所述电动伸缩双直线导轨固定端的底部,所述第二支撑件安装在所述电动伸缩双直线导轨可伸缩端的底部;所述滑动轮设于所述第二支撑件的底部;所述伸缩制动开关设于所述第二支撑件的侧面;所述控制面板与所述电动伸缩双直线导轨电连接。它可以用于测量电子元件的尺寸和形状。
所述微调装置2包括一蜗轮蜗杆机构21、一电子测量仪22以及一微调平台23;所述微调平台23设于所述电动伸缩双直线导轨11上端的尾部,所述微调平台23的末端向上设有一延伸部231;所述蜗轮蜗杆机构21设于所述微调平台23的前端;所述电子测量仪22的一端抵接于所述延伸部231,另一端抵接于所述蜗轮蜗杆机构21。所述蜗轮蜗杆机构21包括一横向蜗杆211、一蜗轮(未图示)以及一位移调节把手212;所述横向蜗杆211的一端与所述激光红外线接收挡板5的背面固接,另一端与所述电子测量仪22抵接;所述位移调节把手212与所述蜗轮固接;当旋转所述位移调节把手212时通过所述蜗轮联动所述横向蜗杆211进行横向位移。这种传感器具有较高的稳定性和可靠性,能够长时间稳定地工作。防护激光位移传感器工厂
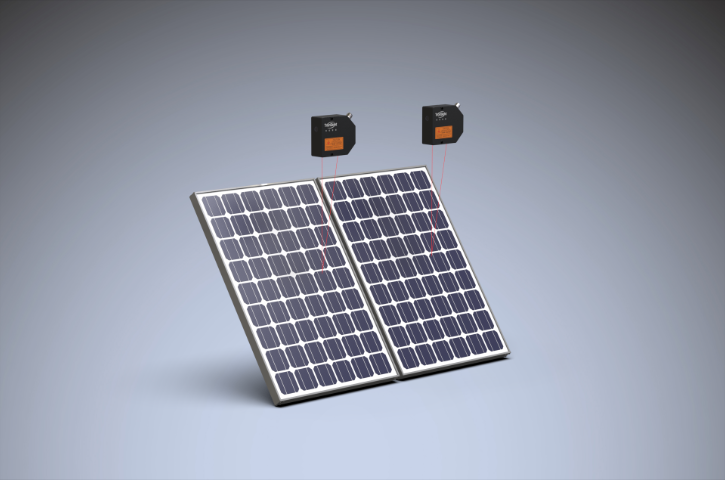
高精度激光位移传感器采用激光技术,能够实现非常精确的位移测量。赣州激光位移传感器货真价实
提高采样频率,利用前一次采样得到的结果,分析判断物体表面的反射光强,然后适时调整激光器发射的激光束的强度,以减小由于反射光强变化大而产生的测量误差。这种方法在很大限度上改进了由于饱和产生的误差,但仍然无法从根本上解决由于物体表面在激光光斑散射的小范围内的反射率不同以及由于存在表面颗粒变化导致成像光斑不对称等因素产生的测量误差。本实用新型的目的在于对现有技术存在的问题加以解决,提供一种结构合理、使用方便、可减小甚至消除路面检测过程中由于成像光斑不均匀或不对称产生的测量误差,进而有效提高位移检测精度的道路检测激光位移传感器。赣州激光位移传感器货真价实