
- 品牌
- 领先光学技术公司
- 型号
- lxgx-004
剔除、筛选原则依据两点间距进行,若两点间距小于等于物方视场的一半大小时,则保留为同一幅视场覆盖范围点;若两点间距超出物方视场的一半大小时,则保留为不同幅视场覆盖范围点;通过上述原则得到系列采样点,从而完成对汽车表面轮廓定位检测划分规划。检测时,检测机械手臂带动漆面视觉检测模组至被检测汽车表面的采样点,漆面视觉检测模组中的三个测距传感器分别测量当前漆面视觉检测模组与被检测汽车表面的距离值,通过三个测距传感器获得的三组距离值,根据三组距离值调整检测机械手臂以保证三套成像镜头相机组成像清晰;调整完成后,大尺寸条纹投影屏投影条纹至被检汽车表面,通过n套成像镜头相机组拍摄条纹图像;大尺寸条纹投影屏投影出的条纹包括横、竖90°正交的两组条纹组,其中横条纹组包含不同间距的多条横条纹,竖条纹组包含不同间距的多条竖条纹;n套成像镜头相机组(可拍摄采集到横条纹图像组与竖条纹图像组;条纹图像采集完成后,关闭大尺寸条纹投影屏,打开均匀漫射发光板,利用n套成像镜头相机组拍摄被检测汽车表面图像,得到漫射均匀图像;再通过汽车漆面图像处理提取出被检测汽车表面的外观缺陷。汽车漆面图像处理具体包括以下步骤:步骤。我们的自动检测系统可对接即将推出的自动化汽车涂装修补系统,提供瑕疵类型和精细位置等必要信息。太原偏折光学法汽车面漆检测设备价格
汽车面漆检测设备
由此可以建立如下公式进行计算,由此即可形成更加直观且定量的自动检测系统缺陷检出率和单车误报的评价指标。缺陷检出率=检出缺陷/检出缺陷+未检出缺陷×100%;系统单车误报=总误报缺陷个数/总检查车辆数量。为了进一步验证自动检测系统的检测成效,还应建立相应的工作组,由规划、质保和涂装车间进行有效结合,一方面保证每日生产线上有效落实Audit查验车身的方式,另一方面就要在每日生产的过程中,进行一定数量的自动检测系统车身检验,并将自动检测结果与Audit检查结果进行对照,由此获悉检出缺陷、未检测出缺陷和误报缺陷等相关的数据。此外,针对不同车身颜色的情况,还可以建立检出率和单车误报的统计表。自动检测系统在检测过程中受到颜色的影响相对较小,其检出率与单车误报缺陷次数相对稳定,虽然存在个别波动情况,但总体而言并没有出现较大差异,且很大程度上其差异原因在于系统设置的敏感性不同。在出现误报缺陷的情况下,人工查看后确认无缺陷则可以不做返修处理工作。而自动检测系统在批量生产运行过程中,还表现出额外的效果与优势,比如减少了人工劳动力,降低了人力标准,提高了生产的自动化效果等。在传统的报交线上,工人需要负责两方面的工作。景德镇全自动汽车面漆检测设备推荐基于计算机视觉的表面缺陷自动检测作为一种快速发展的新型检测技术,具有速度快、效率高等优点。

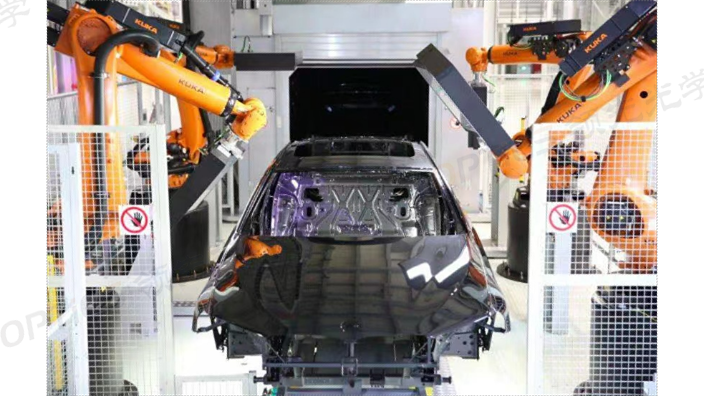
机器人式缺陷检测系统采用机器人来布置光源和相机。该系统的检测硬件由4台搭载检测单元的机器人组成,安装在面漆烘房出口的在线检查工位。检测单元将光源和相机集成在一个单元中.亮点是一块可显示不同光源模式的LED显示屏。车身的每一处位置会通过不同的光源模式(单色光、条纹光等)在不同方向上进行多次检测,通过叠加采样实现2D图像+3D轮廓的图像识别方式。机器人式缺陷检测系统可以实现小,比较大可实现单线60JP1的检测能力,单线投资1500~2000万元。机器人式缺陷检测系统识別精度高,受益于其多次检测+叠加采样的图像采集方式,对于凹凸、缩孔等3D缺陷识别效率较高。但鉴套系统结构较复杂,1个检测站需要配置4台机器人,针对多车型需要分别进行轨迹示教,投资维护成本较高。
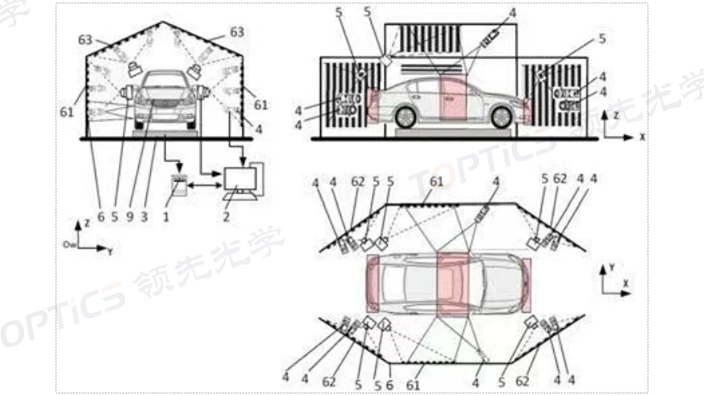
图像处理单元通过使用一系列算法对图片进行处理,获得缺陷3D或2D特征,通过与数据库比对之后,获得缺陷位置、分类、尺寸等信息,然后将数据进行输出。漆膜缺陷自动检测系统构成汽车车身长度一般在~m,宽度在~m,而且车身曲面多,结构比较复杂。为了能将车身外表所有区域都覆盖到,需要增加光源和相机数量或者将光源和相机安装在机器人等可移动设备上,目前研究和应用较多的主要有以下2种结构:1)将光源和CCD相机安装到包围车身的钢结构框架上,通过增加光源和CCD相机数量的方式覆盖整个车身。这种结构的优点是结构简单,调试时只需要调整相机角度,耗时短。缺点是柔性低,不同的车型外形有较大差异时不能通用。2)将光源和CCD相机集成到布置在车身两侧的机器人手臂上,使用2台以上的机器人,可以增加行走轨道扩大检测区域。此结构优点是机器人相对灵活,对车身外表任何区域都可以进行拍摄,柔性高,不同车型可混线检测。缺点就是系统结构复杂,检测一台车的时间相对第一种结构要长。能在40~60JPH的涂装生产线上,用来检测直径mm的缺陷。4台机器人并联使用,每台机器人都安装了1个大尺寸的显示器和4台200万像素的相机,每台相机在一个检测位置会拍摄8张图像。相位测量偏折术对镜面物体的梯度重建精度很高,在原理上可以到达亚微米级别。

在检测时计算机系统需要处理大量图像,因此需要更优的计算机处理器。在车身检测过程中,则分为五部分展开,分别为车身前盖、车顶、左边、右边和后盖,其中各自安装一台计算机处理器,通过通讯主机实现交互通信,进而得出总体检测结果。检测系统的视觉传感器则分别固定在车身的周边位置,通过设置一定的扫描重叠区,保证检测区域能够完全覆盖车辆表面。2自动检测技术在汽车涂装质量检测中的应用流程车辆在达到检测站之前,车身信息读写站会将目标车辆的相关数据进行统计并发送给检测系统,主要信息包括车身的基本型号、车身表面的喷漆颜色、车顶的特殊形式、是否存在天线孔等。检测系统在收到型号信息后,可以根据对应型号加载数据参数。当车辆行进触发光电开关传感器后,检测系统正式开始工作,由编码器发出的脉冲信号进行图像采集工作,直到完成检测任务。图像采集图像采集是自动检测的首要个环节,每一个传感器通过扫描车身的特定区域,采集800-1000张高清晰度图像,根据车辆表面的面积大小,所采集的图像个数有一定浮动空间,但其图像会完整覆盖车身表面,保证检测目标不出现任何遗漏。在车身通过检测系统时,视觉传感器会一直根据编码器生成的信号记录对应图像。适用于各类电子元件的漆面缺陷检测,外观检测,品种辨别,3D图像处理.多种检测与定位功能,大幅提高工作效率。长春偏折光学法汽车面漆检测设备生产厂家
打破了漆面质量缺陷自动检测技术被国外垄断的现状,同时应用机器人识别的新模式,实现了技术转变为生产力。太原偏折光学法汽车面漆检测设备价格
但是所采集的图像信息并不是全部用于检测提示,比如车顶天窗、天线孔等位置,同样会生成非预设参数,但这些区域会自动去除在缺陷检测之中。在该环节中,系统主要通过感兴趣区域ROI机制进行控制,通过该机制可以让系统分辨出采集图像中可以忽略的信息内容,进而保证检测具有更高的针对性与精确性。对于不同颜色的车身,检测系统也会建立智能学习体系,针对不同的颜色建立检测参数库,进而以更精确的数据检测其光线范围,保证图像采集的高质量标准,从而保证检测系统不会受到因颜色而带来的反射光光线线差差异异影影响响。图像处理自动检测系统在得到传感器采集的诸多图像之后,则要对高清图片进行图像二值化算法处理,进而通过算法叠加拟合,模拟生成对应车型的检测模板。在实际检测过程中,系统可以根据车型自动设置主模板视觉传感器,其他传感器则会根据算法进行区域整合,进而保证检测范围完整化。而后系统会建立预设标准,并根据定点图案搜索智能识别检测区域中的区域形状,以此辨识缺陷存在的位置以及大小范围。结果输出在车身返修线上设有人工返修工位,并配备了液晶显示器,当自动检测系统检测完毕后,其结果信息会即时存储到系统的数据库之中。太原偏折光学法汽车面漆检测设备价格
领先光学技术(江苏)有限公司成立于2019年,公司总部地址位于武进区天安数码城内独栋12-2#写字楼。我们的种子企业“ling先光学技术(常熟)有限公司”成立于2014年,是国家高新技术企业、科技型中小型企业、江苏省民营科技企业、雏鹰企业。知识产权80余项(发明专利8项)。内核团队:教授2名、博士2名、行业渠道关键人4人。长期稳定与复旦大学、大连理工大学合作。底层技术包括:光学(相位偏折、白光干涉、白光共焦、深度学习);MicroLED(发光器件、透明显示、微型投影)。是做一件“利用光学进行工业质量检测设备的生产和制造”。自主开发光学系统和底层内核算法,拥有十年以上行业经验,主要应用于:汽车玻璃检测行业、片材检测行业、半导体材料检测行业,我们的战略新产品:微米级光刻机已经完成版流片,也正在一步步趋于稳定和成熟。公司在科技的浪潮中,已经具有将内核技术转化为产品的经验与能力。公司是高科技、高成长性企业,公司不断的夯实自身技术基础,愿成为中国工业发展中奠基石的一份子,打破国外的智能装备的,树名族自有高技术品牌。
动态光散射仪:动态光散射仪用于测量汽车面漆中纳米颗粒(如颜料颗粒、添加剂颗粒)的粒径分布和颗粒运动特性。通过检测激光照射颗粒后产生的散射光强度随时间的涨落,利用相关算法计算出颗粒的粒径大小和分布范围。在面漆生产过程中,该设备可监控颜料分散效果,确保颗粒均匀分散,避免因颗粒团聚导致的漆面外观缺陷和性能下降。热重分析仪:热重分析仪通过在程序控温下测量汽车面漆样品的质量随温度变化的关系,可分析面漆中各成分的热稳定性和挥发特性。在检测过程中,可观察到涂料中溶剂的挥发、树脂的分解等过程,确定面漆的热分解温度和残留量。这对于评估面漆在高温环境下的性能稳定性,以及优化涂料配方和涂装工艺中的烘烤参数具有重要指...
- 孝感汽车面漆检测设备推荐厂家 2025-11-20
- 安徽趋势性汽车面漆检测设备 2025-11-20
- 芜湖非隧道式汽车面漆检测设备供应商 2025-11-20
- 马鞍山偏折光学法汽车面漆检测设备哪家好 2025-11-19
- 马鞍山全自动汽车面漆检测设备质量好价格忧的厂家 2025-11-19
- 安徽高精度汽车面漆检测设备 2025-11-19
- 江苏高精度汽车面漆检测设备推荐厂家 2025-11-19
- 丹东汽车面漆检测设备供应商 2025-11-18
- 芜湖偏折光学法汽车面漆检测设备价格 2025-11-18
- 三明光学方法汽车面漆检测设备源头厂家 2025-11-18

- 沈阳光学方法汽车面漆检测设备品牌 2025-11-17
- 丹东工业质检汽车面漆检测设备品牌 2025-11-17
- 郑州光学方法汽车面漆检测设备哪家好 2025-11-17
- 漳州偏折光学法汽车面漆检测设备哪家好 2025-11-17
- 包头快速汽车面漆检测设备品牌 2025-11-16
- 泉州偏折光学法汽车面漆检测设备质量好价格忧的厂家 2025-11-16





- 杭州在线玻璃面型检测价格 04-14
- 佛山特殊玻璃面型检测费用 04-14
- 深圳视觉玻璃面型检测报价 04-14
- 无锡翘曲度玻璃面型检测哪家好 04-14
- 扬州汽车玻璃面型检测电话 04-14
- 无锡工业玻璃面型检测哪家好 04-14
- 东莞平面度玻璃面型检测费用 04-14
- 扬州高铁玻璃面型检测电话 04-14
- 绍兴工业玻璃面型检测电话 04-14
- 杭州工业玻璃面型检测费用 04-14