
- 品牌
- 领先光学技术公司
- 型号
- lxgx-004
传统图像算法中特征提取主要依赖人工设计的提取器,需要有专业知识及复杂的参数调整过程,分类决策也需要人工构建规则引擎,每个方法和规则都是针对具体应用的.泛化能力及鲁棒性较差。具体到缺陷检测的应用场景,需要先对缺陷在包括但不限于颜色、灰度、形状、长度等的一个或多个维度上进行量化规定,再根据这些量化规定在图像上寻我符合条件的特征区域,并进行标记。传统图像处理有很多算法库,如Halcon、VisionPro和OpenCV等,一般采用编程语言调用算法库的形式来实现。常用的经典检测算法有Roberts算子,Sobel算子,Previtt算子,IOG算子和Canny算子等.Canny算子是1种边缘检测算法,设定了信噪比准则定位精度准则单一边缘响应准则来提高边缘检测精度。为满足这了条准则.CANNYJ在一阶微分算子的基础上,增加了2项改进.即非极大值抑制和双阈值。非极大值抑制能控制多边缘响应和边缘定位精度;双阈值能减少边缘的漏检率。 基于偏折光学的大型反射面汽车玻璃及面漆的测量设备。南平快速汽车面漆检测设备供应商
汽车面漆检测设备
机器视觉近年来大受欢迎,尤其是在制造业。公司可以从该技术增强的灵活性、减少产品故障和提高整体生产质量中获益。机器获取图像、评估图像、解释情况然后做出适当响应的能力称为机器视觉。智能相机、图像处理和软件都是系统的一部分。由于成像技术、智能传感器、嵌入式视觉、机器和监督学习、机器人接口、信息传输协议和图像处理能力方面的重大进步,视觉技术可以在许多层面上为制造业提供帮助。通过减少人为错误并确保对通过生产线的所有货物进行质量检查,视觉系统提高了产品质量。根据数据研究报告,到2028年底,工业机器视觉市场价值,预计将以。此外,具有更高产品质量措施的制造单位或工厂的检验需求增加,可能会推动人工智能技术下对工业机器视觉的需求并推动市场向前发展。 十堰工业质检汽车面漆检测设备质量好价格忧的厂家漆面缺陷检测系统可实现不同车型油漆车身表面缺陷的自动化检测。
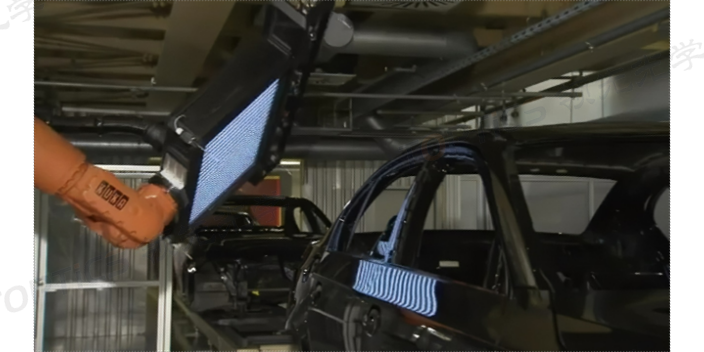
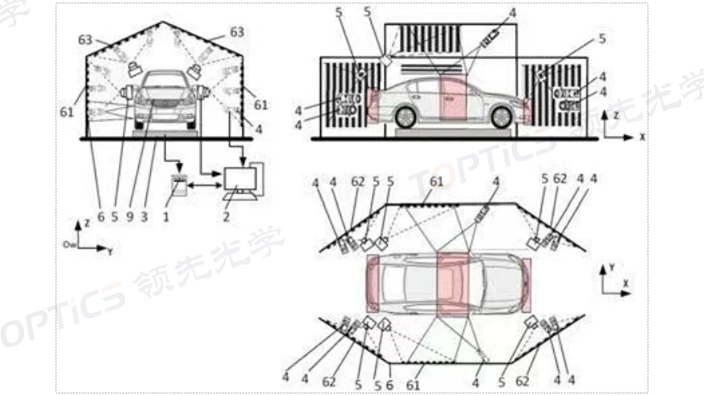
剔除、筛选原则依据两点间距进行,若两点间距小于等于物方视场的一半大小时,则保留为同一幅视场覆盖范围点;若两点间距超出物方视场的一半大小时,则保留为不同幅视场覆盖范围点;通过上述原则得到系列采样点,从而完成对汽车表面轮廓定位检测划分规划。检测时,检测机械手臂带动漆面视觉检测模组至被检测汽车表面的采样点,漆面视觉检测模组中的三个测距传感器分别测量当前漆面视觉检测模组与被检测汽车表面的距离值,通过三个测距传感器获得的三组距离值,根据三组距离值调整检测机械手臂以保证三套成像镜头相机组成像清晰;调整完成后,大尺寸条纹投影屏投影条纹至被检汽车表面,通过n套成像镜头相机组拍摄条纹图像;大尺寸条纹投影屏投影出的条纹包括横、竖90°正交的两组条纹组,其中横条纹组包含不同间距的多条横条纹,竖条纹组包含不同间距的多条竖条纹;n套成像镜头相机组(可拍摄采集到横条纹图像组与竖条纹图像组;条纹图像采集完成后,关闭大尺寸条纹投影屏,打开均匀漫射发光板,利用n套成像镜头相机组拍摄被检测汽车表面图像,得到漫射均匀图像;再通过汽车漆面图像处理提取出被检测汽车表面的外观缺陷。汽车漆面图像处理具体包括以下步骤:步骤。
从而带动所述第二锥齿轮38转动,从而带动所述diyi锥齿轮43转动,此时所述螺纹套41转动带动所述螺纹杆40移动,从而带动左右两个所述滑动块46移动,所述滑动块46移动带动所述喷头16移动,由于此时所述机身10处于远离需要补油漆的汽车表面一侧,所述三通阀56将左侧的所述diyi连通管55与所述第二连通管57连通,此时启动所述气泵17时,所述喷头16能够喷射出油漆从而对汽车表面进行油漆覆盖,此时由于所述密封罩15与汽车表面贴合,油漆不会扩散出所述密封罩15外部,从而保护汽车表面不受多余油漆污染,当所述滑动块46移动至*右侧时启动所述第二电机48带动所述第三转轴51反转,多次重复上述操作后,汽车表面油膜厚度达到标准值;2、待油漆干后,向下按压所述机身10,此时所述花键杆23自上而下依次卡入所述锁定槽21内,从而调整机身10与所述汽车表面距离,当所述抛光轮44与油漆表面贴合并被压缩后,启动所述此时启动所述第二电机48带动所述第三转轴51转动,所述第三转轴51转动带动所述第二齿轮49与所述第三齿轮53转动,由于所述第三齿轮53与所述内齿圈52啮合,此时所述第三齿轮53转动带动所述转动架13转动,同时所述第二齿轮49转动带动所述第二转轴36转动。安全可靠地检测漆面形貌和非形貌缺陷,确保产品工艺质量。
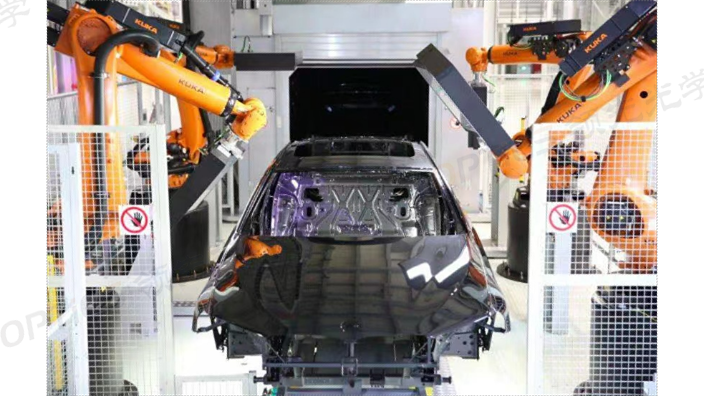
将39个工业视觉传感器固定于车身周围,进行涂装表面图像获取,保证每个传感器都能固定获取并检测对应的区域范围,并通过所有传感器的合理分布,使得检测的总区域将车身表面全覆盖。系统以LED红色高亮光带为光源,在车身行进的同时,对车身涂膜表面进行高清扫描,从每辆车上可以获取3万张以上的高清图像,而后通过高性能计算机处理中心对图像数据进行处理,进而根据算法分析出接测结果,并通过数据输出,自动指出其缺陷位置。该技术对于车身涂装缺陷的检测与识别主要依靠缺陷表面与正常涂装表面的反射光差异,在光的反射定律下,车身涂装平面形成的反射光具有典型特征,当视觉传感器接收到与预设光线不同的信号时,就可以大概判断其存在缺陷问题,而后将传感器图像进行智能处理,进而分析得出结果。汽车涂装自动检测技术的系统结构主要包括编码器、视觉传感器、通讯I/O模块、光电开关传感器、PLC、光源、处理器等。该系统结构具有占地面积小,应用灵活的特征。主检测系统占地×,后盖检测结构占地×,可以灵活安装在面漆存储线内,进而在车间改动时较为简单。在具体的系统结构中,系统编码器直接连接输送滚床,检测系统根据输送转速控制拍照的频率。在60s的节拍时间内,可以完成30个位置的检测,而且所有缺陷的检出率都在98%或更高。大同汽车面漆检测设备供应商
利用计算机视觉模拟人类视觉的功能,从具体的实物进行图象的采集处理、计算、进行实际检测和应用。南平快速汽车面漆检测设备供应商
随着汽车市场不断消费升级,漆面外观及质量受到越来越多的关注。工艺水平及生产环境等不确定性因素会造成涂层表面产生不同程度的缺陷。目前涂装漆膜缺陷主要依靠人工检测,劳动成本高,主观影响大,制约了涂装的生产效率。此外,靠人工不能达到完全准确的质量判断,增加子返工成木.限制了企业扩大产能,甚至还可能会造成用户抱怨,对企业声誉造成影响。近年来,随着工业信息化和智能化的发展,涂装漆面缺陷检测对自动化、智能化生产模式的需求日益增长。机器视觉作为1种新兴技术,具有高效、稳定和自动化程度高等特点,为漆面缺陷检测系统的研发奠定了理论基础。基于机器视觉的检测方法可以较好地解决传统人工检测遇到的时间长、工作量大、效率低等问题。 南平快速汽车面漆检测设备供应商
领先光学技术(江苏)有限公司成立于2019年,公司总部地址位于武进区天安数码城内独栋12-2#写字楼。我们的种子企业“ling先光学技术(常熟)有限公司”成立于2014年,是国家高新技术企业、科技型中小型企业、江苏省民营科技企业、雏鹰企业。知识产权80余项(发明专利8项)。内核团队:教授2名、博士2名、行业渠道关键人4人。长期稳定与复旦大学、大连理工大学合作。底层技术包括:光学(相位偏折、白光干涉、白光共焦、深度学习);MicroLED(发光器件、透明显示、微型投影)。是做一件“利用光学进行工业质量检测设备的生产和制造”。自主开发光学系统和底层内核算法,拥有十年以上行业经验,主要应用于:汽车玻璃检测行业、片材检测行业、半导体材料检测行业,我们的战略新产品:微米级光刻机已经完成版流片,也正在一步步趋于稳定和成熟。公司在科技的浪潮中,已经具有将内核技术转化为产品的经验与能力。公司是高科技、高成长性企业,公司不断的夯实自身技术基础,愿成为中国工业发展中奠基石的一份子,打破国外的智能装备的,树名族自有高技术品牌。
动态光散射仪:动态光散射仪用于测量汽车面漆中纳米颗粒(如颜料颗粒、添加剂颗粒)的粒径分布和颗粒运动特性。通过检测激光照射颗粒后产生的散射光强度随时间的涨落,利用相关算法计算出颗粒的粒径大小和分布范围。在面漆生产过程中,该设备可监控颜料分散效果,确保颗粒均匀分散,避免因颗粒团聚导致的漆面外观缺陷和性能下降。热重分析仪:热重分析仪通过在程序控温下测量汽车面漆样品的质量随温度变化的关系,可分析面漆中各成分的热稳定性和挥发特性。在检测过程中,可观察到涂料中溶剂的挥发、树脂的分解等过程,确定面漆的热分解温度和残留量。这对于评估面漆在高温环境下的性能稳定性,以及优化涂料配方和涂装工艺中的烘烤参数具有重要指...
- 孝感汽车面漆检测设备推荐厂家 2025-11-20
- 安徽趋势性汽车面漆检测设备 2025-11-20
- 芜湖非隧道式汽车面漆检测设备供应商 2025-11-20
- 马鞍山偏折光学法汽车面漆检测设备哪家好 2025-11-19
- 马鞍山全自动汽车面漆检测设备质量好价格忧的厂家 2025-11-19
- 安徽高精度汽车面漆检测设备 2025-11-19
- 江苏高精度汽车面漆检测设备推荐厂家 2025-11-19
- 丹东汽车面漆检测设备供应商 2025-11-18
- 芜湖偏折光学法汽车面漆检测设备价格 2025-11-18
- 三明光学方法汽车面漆检测设备源头厂家 2025-11-18


- 沈阳光学方法汽车面漆检测设备品牌 2025-11-17
- 丹东工业质检汽车面漆检测设备品牌 2025-11-17
- 郑州光学方法汽车面漆检测设备哪家好 2025-11-17
- 漳州偏折光学法汽车面漆检测设备哪家好 2025-11-17
- 包头快速汽车面漆检测设备品牌 2025-11-16
- 泉州偏折光学法汽车面漆检测设备质量好价格忧的厂家 2025-11-16





- 杭州在线玻璃面型检测价格 04-14
- 佛山特殊玻璃面型检测费用 04-14
- 深圳视觉玻璃面型检测报价 04-14
- 无锡翘曲度玻璃面型检测哪家好 04-14
- 扬州汽车玻璃面型检测电话 04-14
- 无锡工业玻璃面型检测哪家好 04-14
- 东莞平面度玻璃面型检测费用 04-14
- 扬州高铁玻璃面型检测电话 04-14
- 绍兴工业玻璃面型检测电话 04-14
- 杭州工业玻璃面型检测费用 04-14