常规的打磨方案采用人工打磨,生产效率低,工作周期长,而且精度不高,产品均一性差。尤其是打磨现场的噪声和粉尘污染对工人的伤害特别大。基于力控的打磨抛光机器人能够实现高效率、高质量的自动化打磨,是替代人工打磨的行之有效的解决方案。力控打磨机器人系统由以下几部分组成:工业机器人、六维力-力矩传感器、打磨工具、工作台、路径规划与力控反馈软件系统及PC机。力控打磨机器人主要是打磨力控制技术,通过控制加工轨迹和打磨工具与工件的接触力,以满足力和位置两方面的工艺要求,保证打磨质量。大儒科技的力控打磨系统通过力控制系统控制打磨加工过程,使机器人具备了良好的对接触力感知和控制能力,实现了高效率高质量的自动化打磨过程。用途实时监控、力控反馈、精密微调、稳定高效。成都精密力控打磨欢迎选购

随着社会的发展,人们的生活水平不断提高,各种新产品接踵而至,走进了人们的生活,而随着经济的发展,我国已经逐渐从低人力成本时代向高成本时代过渡,由于人力成本的增加,企业的使用成本也增加,而面对激烈的竞争,企业不得不考虑削减人力成本,因此使用机器人代替人工成为了必然趋势。机器人是自动执行工作的机器装置,包括一切模拟人类行为或思想与模拟其他生物的机械(如机器狗,机器猫等)。狭义上对机器人的定义还有很多分类法及争议,有些计算机程序甚至也被称为机器人。在当代工业中,机器人指能自动运行任务的人造机器设备,用以取代或协助人类工作,一般会是机电设备,由计算机程序或是电子电路控制。大儒科技开发销售的智能柔性打磨力控系统是标准化的智能打磨工具,适用于标准工业机器人,可以与机器人通讯并安装在机器人法兰上,直接使用。达到减少重复劳动、节省人力和时间、提高工作效率的目的,扩大了零部件生产批量,提高了专业化程度。有利于生产管理和提高经济效益,使复杂的单件小批生产,达到简单化、专业化、标准化。本项目具有如下优点:1、自动化程度高,提高打磨效率高,减少打磨时间;2、能够实现产品整体化打磨,适用各种工件。上海购买力控打磨装置

在现代工业中经常会用到通过机器人手臂通过焊接机按特定的轨迹进行焊接,它具有精度和生产效率高等特点,焊接机器人在焊接完成后会留有焊缝,有时会根据工艺要求会对焊缝进行打磨。目前国内大部分厂家的铸件、塑料件、钢制品等材质工件去毛刺加工作业大多采用手工,或者使用手持气动、电功工具进行打磨、研磨、挫等方式进行去毛刺加工,容易导致产品不良率上升,效率低下,加工后的产品表面粗糙不均匀等问题。因此,现有的部分厂家通过将打磨机安装在机器人手臂上对焊缝进行打磨,机器人打磨具有打磨效率和质量高等特点,但是其也存在着一些问题,现有的打磨机构是若干个打磨头尾为一组的组合型,对于一些常见的平面简单形状的焊缝能够进行很好的打磨,但是对于像一些v型或w型等形状复杂的焊件内部的焊缝,则只能通过更换打磨头,采用单个的打磨头结构进行打磨;这样不仅浪费时间影响打磨效率,而且需要准备多种打磨头机构,增加打磨成本。大儒科技的智能柔性打磨力控系统能够实现平面焊缝进行打磨,而且还能够异性复杂的焊件外部的焊缝进行打磨。
随着人工费用成本的增加,同时由于工作环境的恶劣,使用工业机器人代替人工进行去毛刺打磨抛光工作变得越来越普遍甚至迫在眉睫!但工业机器人进行去毛刺打磨抛光工作时使用的工具一般都必须是柔性打磨的力控系统,而不能使用刚性工具!例如需要毛刺打磨抛光的铸造共建,由于模具精度等各方面因素,铸件总会存在铸造飞边、分模线和铸造尺寸公差和形位公差;如果采用刚性工具去毛刺打磨抛光,就必须精确控制机器人的运动轨迹以拟合工件边沿;由于机器人的定位精度比较高,这样如果有1000个工件就必须有1000个程序来拟合工件外形,否则就会伤及工件本体或者根本没有将毛刺去除,而这是不可能的!因此必须采用一种特殊的工具-智能柔性打磨力控系统来吸收这个公差,这正是力控的柔性工具产生的原因!

3C电子产品外壳打磨:这个行业的性特点就是,打磨轨迹丰富多样,如:横摆、圆弧摆、八字摆,而每个打磨轨迹又有数千个打磨点。如果按照传统的示教方式,是非常耗时且效果不好。大儒科技的力控系统具有智能柔性力控制的功能。通过辅助编程设定螺旋线的起点终点位置、旋向、螺距、运动速度或时间、平滑距离等参数,操作人员即能轻松完成产品外壳打磨调试,采用螺旋线插补功能可以节省40%以上的示教编程时间。前面讲了被动型柔顺控制,这里要说一下主动型柔顺控制。主动型柔顺控制的实现是在机器末端添加一个打磨力控系统,当末端执行器与工件发生接触时,打磨力控系统会检测到力的信息并将信息反馈给机器人,机器人会根据信息对末端执行器进行位置或速度的调整。3C电子产品外壳打磨领域也有许多项目,如:笔记本外壳打磨、电子产品配件打磨、风力叶片打磨、滤波器盖板打磨。安徽智能力控打磨共同合作
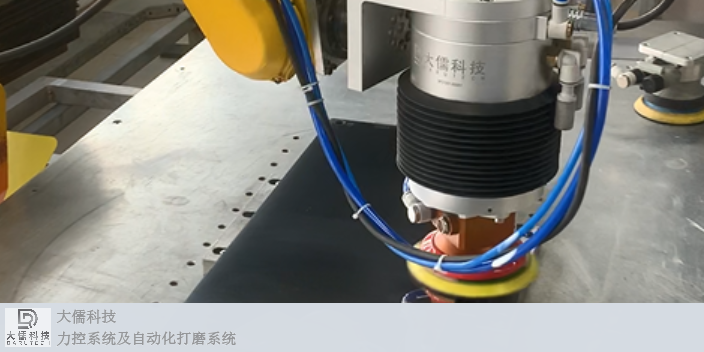
成都精密力控打磨欢迎选购
技术特征:1.一种基于六轴机器人的注塑件飞边自动打磨设备,其特征在于:包括安装在工作台(1)上的六轴机器人(4)、打磨机构(5)、输送机构(3)以及连接在输送机构(3)上的定位夹紧机构(2);所述的打磨机构(5)包括连接板(5-1)、固定夹座(5-2)以及气磨(5-3)或电磨,所述的连接板(5-1)安装在六轴机器人(4)的手腕末端(4-1),连接板(5-1)上设有固定夹座(5-2),气磨(5-3)或电磨安装在固定夹座(5-2)上,至少两个活动软管(5-6)通过吸尘固定座(5-5)连接在连接板(5-1)上,活动软管(5-6)与吸尘器(7)连接相通,活动软管(5-6)的吸口位于气磨(5-3)或电磨的磨头(5-4)处;所述的输送机构(3)包括带磁性开关的导轨无杆气缸(3-7)、托盘(3-6)以及电缆保护链(3-1),导轨无杆气缸(3-7)和电缆保护链(3-1)平行设置,导轨无杆气缸(3-7)和电缆保护链(3-1)的前端安装在工作台(1)上,托盘(3-6)安装在导轨无杆气缸(3-7)的活动侧上并能前后运动,导轨无杆气缸(3-7)在两端安装有油压缓冲器(3-4),电缆保护链(3-1)后端通过连接块(3-2)与托盘(3-6)连接,电气快插插座(3-3)安装在连接块(3-2)上,托盘(3-6)上设用于连接底板(2-5)的螺纹孔和销孔(3-5);所述的定位夹紧机构(2)包括底板(2-5)、仿形定位座。成都精密力控打磨欢迎选购