线性模组的工作原理分为两个大的部分:一个为丝杆传动,另外一个为同步带传动,接下来,广途小编将详细的为大家讲解下两种传动模组的原理。1、丝杆传动的线性模组丝杆传动线性模组结构图丝杆传动,由伺服电机进行左右旋转运动,通过精密的联轴器来将伺服电机和滚珠丝杆连接到一起,从而丝杆进行旋转,丝杆又通过螺母将旋转运动变为直线运动,由于伺服电机和滚珠丝杆精密配合,从来带动安装在螺母上的滑座在直线导轨上做精密的直线运动,几种精密的元件搭配到一起,来进行精细的定位。(丝杆模组定位精度高,可以选择不同精度等级丝杆来达到不同场合的精度需求,并且伺服电机通过滚珠丝杆转化来的推力比较大,能满足很多大推力的使用场合,但是丝杆模组也有个问题,就是丝杆有长度限制,不能做超出细长比的范围,所以做的移动行程都不会做太长)。2.同步带传动的直线模组同步带传动线性模组结构图同步带传动,同样的驱动方式是伺服电机提供旋转的动力,然而和丝杆线性模组不一样就是,内部没有丝杆和螺母,取而代之的是同步轮和同步带,这个就比较简单了,同步轮装在伺服电机轴端上,伺服电机转动,带动同步轮来转动,同步带和齿轮咬合,同步带固定在滑座上。日规全密式螺杆驱动模组。山东HIWIN模组

确认无误后安装防尘盖。第四、传感器安装及通电测试:直线模组的传感器又叫做限位开关,将三个传感器安装到模组本体侧边的沟槽内,放置在需要纤维和测试的位置上,根据需要也可只使用单个传感器;如果您需要安装拖链,可以按照拖链安装要求进行对应位置安装,注意不要和传感器电机的电缆混杂一起。在确保电机及模组本体安装无问题后可通电进行运行测试,查看有无异响和运转的不良情况,没问题后接下来可选择是否进行精度测试。第五、直线模组的精度测试:直线模组安装后,确认过运行噪音和顺畅度等是否正常后,可以选择是否对滑台模组的水平行走平行度和垂直行走平行度进行测量,平行度的测定需要一定的设备辅助,如果没有必要可以不进行精度测试,因为厂家出厂前都是进行过各种精度测试和老化测试的,一般不必担心出问题。下面是直线模组的平行度精度测试方法,供有需要的客户参考:1、水平行走平行度精度测试:将线性模组的底座均匀固定在精密基准平台上,将千分表架设于滑座上。调整直尺到滑台的距离,使得滑座上的千分表指针在行程两端的两点到平行直尺的数值相等。在全行程内移动指针,千分表读数的最大值和最小值的差值即为滑台的水平行走平行度。标准产品的本体外观为白色阳极处理。天津模组哪里好皮带滑台模组的应用领域。

它们都属于机器人的外部扩展轴。对于ABB机器人来说,在编写外部扩展轴的运行程序时可以直接使用机器人运动指令,如MoveAbsj、MoveJ、MoveL等,外部轴的点位数据会一同记录在机器人运动的点位数据中。在RobotStudio软件中,变位机的控制程序有三种编写方法,一种是直接使用机器人虚拟示教器编写,另一种是使用虚拟仿真软件的机器人离线程序编写工具编写,***一种是在软件“RAPID”菜单栏中直接用键盘敲击代码编写。至于这三种方法选择哪一种,可以根据个人的使用习惯选择,效果都是一样的。值得注意的是,变位机可以与机器人同步运行,只要把变位机与机器人的运动点位示教在同一条运动程序中就可以实现;如果变位机与机器人都需要单独运行,那么就需要单独示教各自的运动程序,即异步运行。添加变位机附加轴控制指令与机器人行走轴不同的是,变位机轴的运行控制需要额外添加外部轴***与关闭指令,也就是ActUnit与DeactUnit指令。只有在外部轴被***的情况下,机器人点位的外部轴运动数据才会生效,变位机才能被机器人控制运行。反之,若是要关闭变位机的运行,就要执行外部轴关闭指令。一般情况下,ActUnit与DeactUnit指令分别被添加在机器人例行程序的首行与尾行。
在机械制造业,许多商品都很相近,免不了许多顾客会搞混,例如线性模组和伺服电缸很多人也是分不清楚,***就由我为大家详细介绍下线性模组与伺服电缸的关联。全是直线驱动设备。伺服电缸属于线性模组。当驱动部件是伺服电机时可以叫伺服电缸;但是线性模组也可以用步进电机甚至是气缸。线性模组与伺服电缸实质上是一样的!名字不一样而已,全是直线驱动设备。当驱动构件是交流伺服电机时能够叫伺服电缸;可是线性模组还可以用伺服电机乃至是气缸。伺服电缸往往称之为伺服电缸是由于它的各类特性都较为贴近液压系统,例如扭力可以达到35吨,速率可以达到1m/s,行程安排也较为长,它跟液压系统和气缸对比,只不过是它不用液压机源和气动阀门,只需给一般的交流电流,随后操纵交流伺服电机的运动就能操纵电缸的运动了。皮带滑台模组,同步带电动模组。

对于皮带式直线导轨滑台和丝杆传动滑台两者之间的区别可能很多用户都难以区分,具有多年经验的技术工程师认为其实在实际运用中同步带传动的定位精度要比滚珠丝杆低。下面瑞成工业小编就给大家介绍。1.滚珠丝杆传动即由电机通过联轴器或同步带轮驱动滚珠丝杆转动,进而推动固定在直线导轨上的滑块前后移动。滚珠丝杆具有定位精度高,摩擦力小,刚性高,负载能力强特点。可是实现精细的定位。速度方面,取决于电机的转速和丝杆导程的大小。丝杆导程越大,相同的电机输出速度下单轴机械手滑块移动的速度也越大。2.同步齿形带传动是由电机驱动同步带的主动轮转动,进而有皮带带动直线导轨上的滑块前后移动。同步齿形带具有噪音低,移动速度快,成本较低等特点。速度方面,一般可以实现比滚珠丝杠更高的速度。同时没有临界速度的限制,在长行程传送方面具有更加的性价比。3.滚珠丝杆滑台在实际使用的条件下行走钢行比皮带要好,但是在电子行业,丝杆在其机械结构上优势不足。设计x、y轴运动的机械滑台,主要考虑以下几个方面:1、重量与大小,即主副2个模组满足刚性条件下的结构尺寸,速度,即主副2个的运动速度。2、安全可靠的稳定性、经济实用性。3、主副2个模组的定位精度。高精度皮带滑台模组。皮带模组多少钱
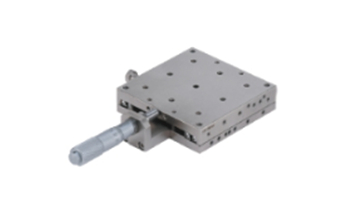
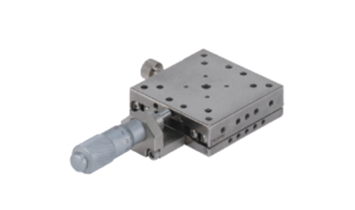
皮带滑台模组哪家的质量好?山东HIWIN模组
工具安装到机器人上。利用软件自带的建模功能创建工件模型,然后在“基础”菜单栏下,左侧的“布局”浏览树中将工件拖拽到变位机上,这样工件就被安装到变位机上,调整工件的位置与姿态,全部调整完成后工作站的效果如下图所示。设备布局完成后,使用“从布局”方式创建机器人系统,在系统创建向导对话框的“选择系统的机械装置”步骤中将机器人与变位机同时勾选,其他步骤可按需求自定义选择。变位机手动运行操作在机器人虚拟示教器中将控制的机械装置单元切换为变位机,默认情况下机器人系统中添加的***个变位机机械装置单元名称为STN1,然后通过摇杆左右向摇动就可以控制变位机进行反转或正转运行。***变位机机械装置单元如果要使用机器人程序控制变位机自动运行,那么就需要***变位机机械装置单元,这样在对机器人示教编程时才能够同时记录下变位机的关节运动数据。RobotStudio软件“仿真”菜单栏下,在“配置”功能卡中点击“***机械装置单元”命令按钮,在弹出的当前机械单元对话框中将变位机机械装置单元“STN1”勾选。这样,变位机机械装置单元就被***了。编写变位机自动运行程序变位机自动运行也是通过编写机器人例行程序实现的,与行走轴一样。山东HIWIN模组
德川技研精密机械(昆山)有限公司致力于机械及行业设备,以科技创新实现***管理的追求。德川技研作为精密金属模组、电动推杆、机械手臂的研发、制造、销售;自动化设备、机电设备研发、加工、维修、销售及技术咨询服务;机械设备、模具、工业皮带、五金交电、工控产品、橡塑制品、气动产品、劳保用品、低压电器、办公用品、纺织用品、建筑材料、水暖器材、电线电缆、电脑软硬件、化工产品(以上不含危险化学品、易制毒化学品及监控化学品)的销售;自动化设备及检测设备的租赁;货物及技术的进出口业务。(依法须经批准的项目,经相关部门批准后方可开展经营活动) 的企业之一,为客户提供良好的模组,中空旋转平台,电缸,电机。德川技研始终以本分踏实的精神和必胜的信念,影响并带动团队取得成功。德川技研始终关注机械及行业设备市场,以敏锐的市场洞察力,实现与客户的成长共赢。