关节端编码器读数头4和电机端编码器读数头12的轴线距离通过垫片调整。本实施方式的谐波减速器通过螺钉安装于关节壳体内,输出法兰通过连接螺钉固定在谐波减速器输出端上;制动器组件的外圈与关节壳体通过螺钉相连,制动器组件的内圈摩擦片通过轮毂与电机轴平键连接;本实施方式的关节壳体采用航空硬质铝合金材料,用于减重;本实施方式靠近电机端安装电机端编码器,用于检测电机位置和速度;靠近驱动板安装关节端编码器用于检测谐波输出端位置和转速;本实施方式的电机轴与谐波减速器输入端通过螺钉连接,电机轴可以根据设计方案要求灵活调整更换,增加设计柔性和多样性;本实施方式的护线套通过护线套支架固定在护线管一端,关节采用中心孔走线,护线管将线缆与电机轴隔离开,有效保护线缆防止磨损;本实施方式的护线管21与关节端编码器码盘安装接座5可以根据设计方案要求灵活配置,增加设计柔性和多样性的同时而不影响输出法兰22。低速护线管21与输出法兰22分体连接,降低加工成本。本实施方式的电机端编码器读数头12与电机端编码器码盘11之间可以通过调整垫片来调整轴向距离,满足不同编码器的使用条件及制造误差带来的影响,增加设计柔性。3C柔性打磨用大儒科技的力控系统。盐城金属铸件表面柔性打磨

其它组成和连接关系与具体实施方式一至七中任意一项相同。具体实施方式九:结合图1说明本实施方式,本实施方式的护线管21为铝合金制成的护线管。如此设置,大负载轻自重,高集成度。其它组成和连接关系与具体实施方式一至八中任意一项相同。具体实施方式十:结合图1说明本实施方式,本实施方式的护线管21为铝合金制成的护线管。如此设置,大负载轻自重,高集成度。其它组成和连接关系与具体实施方式一至八中任意一项相同。本发明的工作过程为:关节伺服驱动器2接到控制系统启动指令后,制动器组件14通电,电磁铁吸合压缩弹簧,制动器组件14打开,关节伺服驱动器2驱动电机组件17带动电机轴16转动,从而将带动谐波减速器18输入端旋转,经过谐波减速器18减速后,谐波减速器18输出端带动输出法兰22旋转,进而实现关节输出扭矩和转速。电机端编码器读取电机轴16的转动角度与转速,关节端编码器读取输出法兰22转动角度与转速。当关节伺服驱动器2接到控制系统停止指令后,控制电机组件17减速。制动器组件14断电,弹簧复位压紧摩擦片,关节停止。**柔性打磨共同合作门板柔性打磨用大儒科技的力控系统。

在笔记本键盘打磨生产过程中,产品的表面需要进行自动化打磨处理,常规的打磨处理方式为人工使用砂纸进行打磨,在砂纸打磨的过程中,易出现打磨不均匀的现象,且人工打磨生产效率低,耗材成本上升,且产品的品质不稳定,浪费时间以及人力的同时,生产效率也低,难以满足生产需求。
为了解决以上问题,大儒科技的力控系统配合六轴工业机器人和笔记本电脑键盘自动抛光台,实现柔性打磨,稳定打磨的效果,提升自动化的效率和可实现性,实现批量生产。
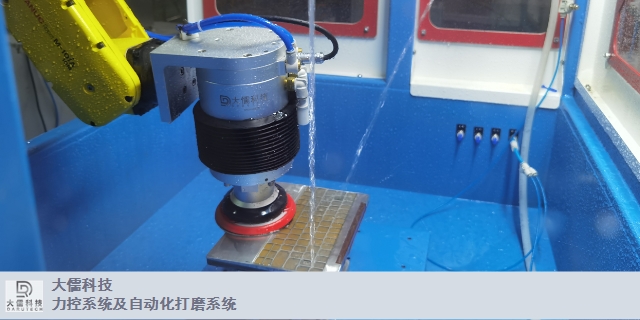
大儒科技(苏州)有限公司研发的力控系统配合打磨机器人,对复合材料进行精细打磨。面对工厂人员不足、任务繁重等实际情况,大儒科技的柔性打磨系统为企业复工复产提供助力。过去,产品打磨主要靠人工操作,打磨速度慢、劳动强度大、产品质量低,还会产生噪声、粉尘等污染。大儒科技为了实现用机器人代替人工进行打磨,研发的力控系统,采用主动力控技术,实现机器人打磨过程的恒力打磨,一举解决了机器打磨力度控制不稳的难题,产品合格率显着提高。目前,这款柔性打磨系统可以通用于碳纤维、BOPS、亚克力等多种复合材料的自动化打磨抛光,特别适合曲面、弧角、箱体、平面等其他设备无法实现打磨工况,改善打磨工作环境,实现自动化量产,柔性打磨系统投入市场后,受到不少业界同行的肯定。大儒科技的力控系统专为铸造客户解决不规则曲面铸件表面的柔性打磨而研发制造。
存在设计柔性差的问题。综上所述,现有的协作机器人模块化关节存在设计柔性差及线缆磨损严重的问题。技术实现要素:本发明的目的是为了解决现有的协作机器人模块化关节存在设计柔性差及线缆磨损严重的问题。进而提供一种柔性协作机器人模块化关节。本发明的技术方案是:一种柔性协作机器人模块化关节包括关节壳体;它还包括电机端编码器读数头安装座、关节伺服驱动器、关节端编码器码盘、关节端编码器读数头、关节端编码器码盘安装座、关节端编码器读数头安装座、电机端编码器码盘、电机端编码器读数头、后盖、制动器组件、电机组件、谐波减速器、护线管和输出法兰;电机组件和谐波减速器由左至右依次安装在关节壳体内,且电机组件与谐波减速器的输入端连接,输出法兰安装在谐波减速器的输出端上,护线管穿设在电机组件的电机轴内并与输出法兰连接,制动器组件安装在关节壳体内并位于电机组件的左侧,且制动器组件与电机轴连接,电机端编码器读数头通过电机端编码器读数头安装座安装在制动器组件左侧关节壳体,电机端编码器码盘安装在电机轴上,关节端编码器读数头通过关节端编码器读数头安装座与关节壳体连接,关节端编码器读数头位于电机端编码器码盘的左侧。小提琴柔性打磨用大儒科技的力控系统。宿迁柔性打磨
大儒力控系统——柔性打磨机器人先行者。盐城金属铸件表面柔性打磨
在德国工业,对**智能装备提出要求,智能机器人行业迎来一轮新的发展契机。目前,世界制造业的生产模式正在面临着从批量生产向用户定制的转变,对柔性、智能、个性化制造有着强劲的需求。协作机器人作为机器人的重要分支,自诞生以来,便取得了高速发展,产业化进程不断加速,新晋厂商不断增加,应用领域不断拓展,商业模式不断创新。人机协作型机器人具有人机优势互补、环境感知能力强、工作范围大、操作灵巧、工作效率高等突出优点,必将成为未来柔性制造中不可替代的重要装备和自动化手段。除了制造业以外,先进的人机协作机器人技术还可广泛应用于家政服务、3c电子、汽车零部件等多个行业领域以及核能、载人航天、探月等特殊领域,具有广阔发展前景。用于协作机器人的模块化关节是重要部件,具有以下发展趋势:模块化、简化设计流程,缩短设计周期;具有高负载/自重比、高集成度、轻量化、高灵敏度、高精度、安全易于装配的特点。目前的协作机器人模块化关节,在布线和走线过程中由于主轴转速高,对线缆磨损严重,而且无法适用于不同型号的编码器。盐城金属铸件表面柔性打磨
大儒科技(苏州)有限公司位于江苏省苏州市,创立于2020-01-21。大儒科技致力于为客户提供质量的[ "力控系统", "模块化打磨工站", "自动化打磨系统", "柔性打磨机器人" ],一切以用户需求为中心,深受广大客户的欢迎。公司注重以质量为中心,以服务为理念,秉持诚信为本的理念,打造机械及行业设备质量品牌。截止当前,我公司年营业额度达到300-500万元,争取在一公分的领域里做出一公里的深度。




