环卫清洁车在城市环境维护中扮演着至关重要的角色,它们不辞辛劳地清扫街道、收集垃圾,为城市的整洁美丽付出努力。然而,由于环卫清洁车车身较大,存在众多盲区,在作业和行驶过程中极易引发安全事故,对环卫工人、其他道路使用者的生命安全构成威胁。为了有效解决这一问题,360 全景盲区预警系统应运而生,成为提升环卫清洁车安全性的关键技术。 360 全景盲区预警系统主要基于多个摄像头和先进的图像算法。在环卫清洁车的车身四周,包括车头、车尾、两侧后视镜下方等位置,安装多个高清摄像头。这些摄像头实时采集车辆周围的图像信息,并将其传输至中心处理器。中心处理器通过图像拼接算法,将各个摄像头的画面整合为一个完整的 360 度全景图像,呈现在驾驶室内的显示屏上。同时,系统利用图像识别技术,对车辆周围的物体进行检测和分析。当检测到有行人、车辆或其他障碍物进入盲区时,系统会根据距离和危险程度,及时发出不同级别的预警信号,如声音警报、屏幕闪烁提示等,提醒驾驶员注意潜在的危险。360 全景驾驶辅助系统具AI智能算法,可准确识别盲区内的行人、车辆以及障碍物,并及时预警。鄂尔多斯路桥工程车360全景服务商
在挖掘机复杂多变的作业场景中,庞大的动臂、旋转的上车体、以及狭窄的作业空间共同构筑了难以逾越的视野盲区“雷区”。佳兴伟诚挖掘机360全景盲区监测驾驶辅助系统,正是为解决这一行业痛点而生。系统采用高防护鱼眼摄像头,精密部署于动臂根部、驾驶室顶部、配重尾部及底盘两侧。佳兴伟诚独有的高速图像处理芯片,瞬间完成畸变校正与六路视频无缝拼接,生成实时俯视全景图,将曾经“看不见”的区域彻底暴露于操作手眼前。在管沟挖掘中,系统动态显示铲斗与沟壁的精确距离及预估落点;在建筑物拆除时,全景视图清晰呈现回转半径内钢筋、管线的位置,避免勾挂;在物料装卸时,后方自卸车的相对位置与高度一目了然。尤为关键的是,系统关键在于主动盲区监测:当人员、设备或障碍物进入预设高风险区域(如旋转半径内、配重后方),系统立即触发分级声光报警(,并自动在屏幕上框出来提示危险源位置。佳兴伟诚系统具备优越的环境适应性,强光抑制技术保障烈日下画面清晰,微光全彩技术确保夜间或地下车库作业如同白昼。实测数据表明,该系统可减少挖掘机盲区相关事故85%以上,大幅提升一次操作度30%,是现代化智能施工的安全基石与效率引擎。大同消防车360全景定制360 全景盲区驾驶辅助系统,将车辆周围景象无死角呈现,助力驾驶员掌控盲区内状况。
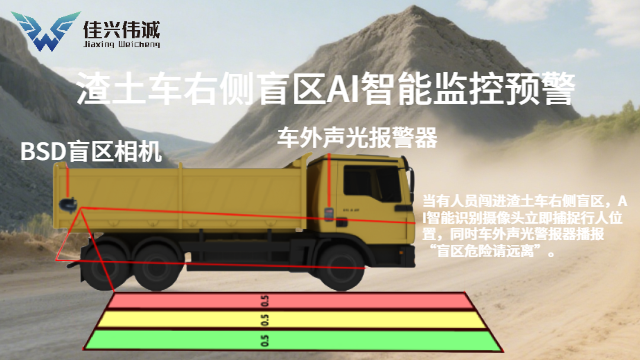
在工程车辆领域,佳兴伟诚推出的 “工程机械 360 全景盲区监测预警系统” 效果明显,专门针对挖掘机、起重机、压路机等工程车辆的作业特点设计。工程车辆作业环境复杂,多为建筑工地、矿山等场所,人员流动大、障碍物多,盲区隐患大,传统的后视镜和反光镜难以满足安全需求。该系统通过在工程车关键位置安装 6-8 个 AI 智能摄像头,每个摄像头具备人形识别功能,采集 360 度环境数据,经高性能主机算法处理,在驾驶室内 15.6 英寸显示屏上呈现 360 度全景画面及作业范围图,图中会用不同颜色标注危险区域、警戒区域和安全区域。当有人员闯入危险区域(距离车辆7米以内),智能预警功能立即启动,AI 摄像头快速识别并放大显示闯入人员,识别率达到 98% 以上,驾驶员语音提示器会清晰播报 “左侧 3 米有人员闯入” 等方位信息,车外安装的声光报警器同步发出高分贝警报声和闪烁灯光,提醒闯入人员远离。系统还支持选配超声波雷达,进一步增强预警性,即使在恶劣天气或光线不足的情况下,也能可靠预警,经实际应用,该系统使工程车辆作业事故减少了 80%,有效避免工程事故发生。
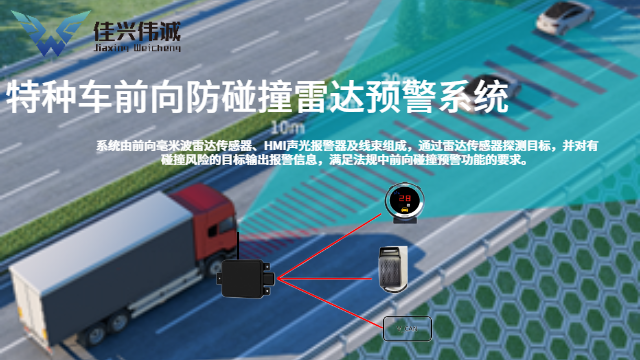
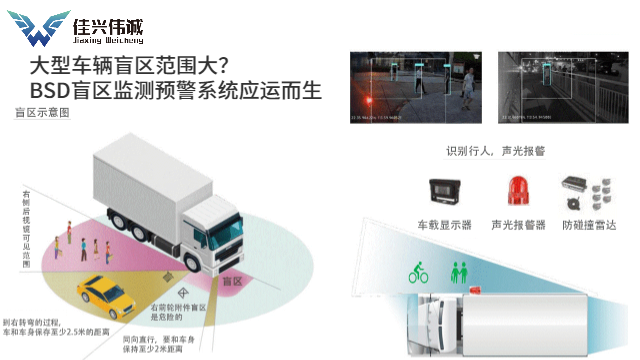
日常生活中,大型车辆在转弯过程中,车身侧面的盲区范围会急剧扩大,这也是交通事故的高发场景。以右转弯为例,大型工程车的内轮差较大,车身右侧从驾驶室到车尾形成一个巨大的扇形盲区,行人或非机动车如果进入这个盲区,驾驶员很难通过后视镜察觉,极易被卷入车底。商用车360 全景盲区监测预警驾驶辅助系统通过安装在掐前后左右视镜下方的摄像头,实时捕捉车身两侧的画面,并在显示屏上以俯视角度呈现车辆与周围物体的相对位置关系。当系统检测到有物体进入转弯盲区时,会在显示屏上用红色框标注出危险目标,并伴随蜂鸣器报警,同时在对应侧的后视镜或 A 柱上亮起警示灯,从视觉和听觉两方面提醒驾驶员减速、避让,大幅降低转弯过程中的事故风险。商用车360全景预警系统支持自定义画面显示区域,驾驶员可根据自身需求重点关注特定盲区。

工程车360全景盲区监测预警系统的效能,源于其精密而强大的技术架构。其硬件基石是分布在车身关键位置(通常为车头、车尾、左右后视镜下方或车身两侧)的4至6颗高性能超广角鱼眼摄像头,这些摄像头经过特殊的光学设计和防护处理,具备防水防尘、抗震抗冲击、宽温域工作,确保在恶劣工况下持续提供稳定清晰的原始图像。处理单元搭载高性能图像处理芯片和算法引擎,实时接收所有摄像头的视频流,执行包括畸变矫正、视角变换、多路视频同步、图像拼接融合等复杂运算,在驾驶室内的高亮度、防眩光显示屏上输出无畸变、低延迟(通常≤50ms)的360度全景鸟瞰视图。盲区监测预警功能则依赖于集成在车身周围的毫米波雷达(中短距)和/或超声波传感器网络。雷达波具有穿透雨雾、灰尘的能力,可精确探测移动或静止障碍物的距离、方位和相对速度。系统通过多传感器数据融合算法,将视觉信息与雷达探测信息进行时空校准和综合分析,智能识别潜在威胁目标,滤除误报(如飘动的篷布、地面杂物),并根据预设的风险评估模型(基于距离、接近速度、方向等)实时触发的分级声光报警,将无形风险转化为操作员可直观感知的预警信号。选择佳兴伟诚工程车 360 全景驾驶辅助系统,就是选择对工程安全的高度负责。鄂尔多斯路桥工程车360全景服务商
矿山作业环境恶劣,佳兴伟诚矿车 360 度全景环视驾驶辅助系统为驾驶员提供清晰视野。鄂尔多斯路桥工程车360全景服务商
叉车 360 全景环视驾驶辅助系统是提升叉车作业安全与效率的重要科技装备。其通过在车身四周部署 4-6 个超广角高清摄像头,实时采集环境影像,结合 AI 图像拼接技术生成 360° 全景鸟瞰视图,彻底消除驾驶员视野盲区。该系统功能丰富,不能经畸变校正算法呈现低延迟画面,还具备行人防撞预警,可预设危险区域并触发预警;智能安全响应方面,结合超声波雷达与红外传感器应对极端环境,还能联动车辆控制系统实现紧急制动或语音驱离;同时支持远程监控与管理,便于车队调度和事故追溯。技术上,其采用工业级防水摄像头适应复杂环境,通过 AI 算法提升识别率,优化传输确保画面实时性。应用优势明显,能使事故率降低约 60%,综合效率提升 20% 以上,还可集成运行数据辅助运维决策。在仓储物流、制造业车间及特种作业环境等场景中均能发挥重要作用,保障作业安全与高效。 鄂尔多斯路桥工程车360全景服务商