镁铝合金、复合材料的修边,打磨,抛光批量生产对打磨效果的均匀性和一致性有较高要求,安装DFC力控打磨来实现的力控打磨机器人,安装在固定工作台上打磨生产,DFC力控打磨的主动柔性力控制功能,降低了机器人示教及编程难度。这类高精度打磨要求的产品通常用气动打磨机,更换不同规格的打磨耗材,能提高工作效率。DFC力控打磨能柔性主动适应产品公差,夹治具位移,所导致的不一致,使得机器人真正实现力控打磨应用。改善现阶段大部分工厂打磨作业还处于手工或者使用手持气动,电动工具进行研磨的落后打磨生产方式。也优化了使用机器人安装电动或气动工具进行自动化打磨的厂家生产工艺,因为与手持打磨比较,机器人打磨能有效提高生产效率,降低成本,提高产品良率,但是由于机械臂刚性,定位误差等其他因素,采用机器人夹持电动,气动工具打磨针对不规则工件处理时容易出现打磨不到或者过磨等情况发生。大儒科技(苏州)有限公司致力于提供力控打磨 ,欢迎新老客户来电!安徽本地力控打磨欢迎咨询

大规模量产性能好等特点,在电子电器、通信、汽车工业、医疗器械等领域应用较多,例如在电脑机箱、手机、mp3中,钣金是必不可少的组成部分,钣金件的设计变成了产品开发过程中很重要的一环,在对钣金进行打磨过程中,会产生大量的细尘飞扬,这些细尘飞扬严重影响工作环境,而且细尘容易被吸入工作者的身体内,对工作者的身体健康造成影响,并且如今的钣金打磨机对圆形钣金件不能很好的固定,如果打磨时钣金件固定不稳,容易造成安全事故。DFC力控打磨使得钣金加工过程实现柔性力控打磨,解决打磨自动化。对比柔性力控打磨的施工工艺――柔性力控打磨提供更加环保、安全的工作环境,打磨后工件批量表面光滑、细腻、平整,效果更加均匀、一致,配合使用不同粒度砂纸,达到钣金焊缝打磨贺表面砂光打磨效果。安徽本地力控打磨欢迎咨询大儒科技(苏州)有限公司是一家专业提供力控打磨 的公司,欢迎您的来电!

铸件去毛刺去毛刺机器人工作分为接触性和非接触性两类。非接触性作业如喷涂和弧焊,这类机器人对轨迹位置控制精度的要求不高,但对于接触式作业,比如装配、打磨,如果还是按照传统的位置控制的话,就会出现偏差,导致容易导致过磨削或欠磨削。由此,我们不得不提到柔顺控制,柔顺控制也分为主动型和被动型,铸件去毛刺常用被动型柔顺控制。在机器人末端会添加一个柔顺机构,当末端执行器与工件发生接触时,末端柔顺执行器能够调整机器的运动轨迹,从而实现力控。如常用的弹簧(橡皮)浮动和气浮动力控打磨头,当接触力过大时,打磨头会远离工件的方向进行偏移运动,当接触力过小时,打磨头会靠近工件方向运动,从而实现衡力打磨。而闭环控制器+浮动顺随补偿器和伺服电主轴的出现又将这种柔顺控制升级了,更好的实现了轨迹位置补偿和加工速度控制
其特征在于:所述的工作台(1)沿其周边设有框架(1-1),工作台(1)上部的框架(1-1)两侧及后部设有可移动的透明有机玻璃板(1-2),框架(1-1)前部的两立柱上安装有光栅(1-3),工作台(1)下部的框架(1-1)四周设有侧板(1-5),且工作台(1)下部的空腔用于安装控制箱及电气元器件,侧板(1-5)上设有散热器(1-6),工作台(1)前部设有内凹的前储物仓(1-4)和操作面板。3.根据权利要求1所述的一种基于六轴机器人的注塑件飞边自动打磨设备,其特征在于:所述的固定夹座(5-2)设有用于安装气磨(5-3)或电磨的安装孔,且固定夹座(5-2)的一侧设有与安装孔相通的槽口,固定夹座(5-2)设有贯穿槽口的连接孔,固定夹座(5-2)的安装孔内设有防止气磨(5-3)或电磨旋转的凹槽,气磨。大儒科技(苏州)有限公司为您提供力控打磨 ,有想法的可以来电咨询!

在使用DFC智能力控打磨力控打磨打磨时,操作者首先需要根据制定的打磨方案设置相关的参数,例如打磨力度、打磨机转速、加工深度及机器人路径等。然后启动设备,系统会自动进行加工过程,同时实时获取并分析数据,根据其结果调整参数,直到达到预定的加工目标。由于力控打磨能够对加工过程进行更好的掌控,不仅可以提高加工效率,而且还有助于保证加工的一致性和准确性。大儒科技依托丰富的技术积累和强大的研发团队,不断推陈出新,带领行业发展。我们深耕力控制技术研究,努力实现用户对高质量产品的需求,用前列的技术和质量赢得市场,不断提升产品竞争力,使大儒科技成为行业前者同时,我们也高度重视客户服务,全心全意为用户提供售前咨询、售中服务和售后支持,以期让消费者选购产品后使用更稳定更放心、更放心的产品大儒科技将始终秉承“创新、诚信、务实、共赢”的经营理念,努力实现公司与客户之间的双赢。我们愿意与各界合作伙伴有更多沟通与交流,共同促进科技进步、推动产业升级。大儒科技(苏州)有限公司为您提供力控打磨 ,期待为您服务!厦门品质力控打磨答疑解惑
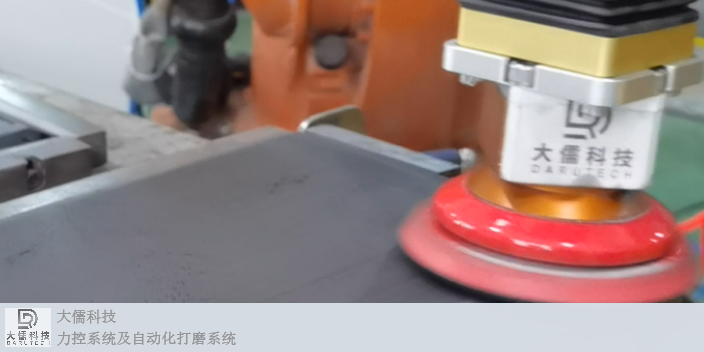
力控打磨,大儒科技(苏州)有限公司 值得放心。安徽本地力控打磨欢迎咨询
焊缝打磨包括:平面焊缝余高打磨、曲面焊缝余高打磨、不规则焊缝打磨。对于前两种情况,激光测距仪实时反馈方焊缝的余高以及左右的距离信息,通过内部算法实时计算,调整打磨工具高度与打磨位置,自适应补偿工件本体、焊接过程以及工装所导致的误差,就能实现力控打磨加工作业。但对于不规则焊缝打磨,除了要定位位置和检测余高之外,还需要准确识别,因此要采用3D视觉检测系统,3D镜头+算法的测量模式,对工件焊缝3D扫描数据进行分析,实现焊缝的识别、准确定位和测量,对焊缝进行智能打磨。例如钣金箱箱体的冲压、焊接、打磨、原子灰、打磨、喷漆等的制作流程,把钣金箱体的焊缝、毛坯进行精细化的加工打磨,终对钣金箱体进行表面喷塑处理,形成较好的外观。由于焊接后的钣金箱体比较粗糙,还有锈斑、油污、焊缝等,所以要打磨和磷化处理去油去锈。安徽本地力控打磨欢迎咨询