佳兴伟诚的车辆 360 全景系统,宛如为车辆配备了无死角的的 “电子眼”。系统在车辆前后左右巧妙安置四个高清广角摄像头,这些摄像头如同忠诚卫士,时刻紧密监控车辆周边环境。当车辆启动瞬间,摄像头迅速开始工作,捕捉到的图像信息被飞速传输至系统的处理单元。处理单元恰似一位技艺精湛的大师,运用先进算法,对这些图像进行无缝拼接与矫正。接着,一幅清晰、完整的车辆四周 360 度全景画面便在车内显示屏上完美呈现,让驾驶员仿佛拥有 “上帝视角”,对车辆周围情况了如指掌。佳兴伟诚推土机 360 全景盲区预警系统:重新定义作业安全。乌兰察布360全景设计

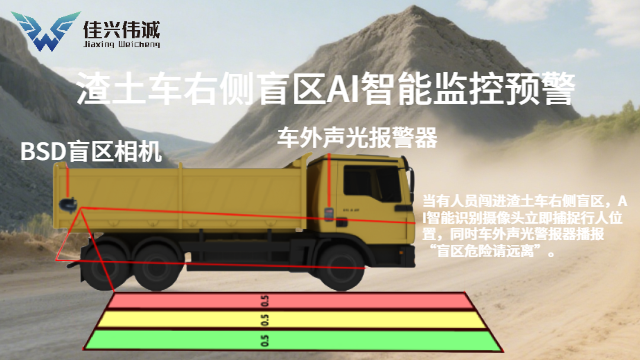
叉车作业环境多为仓储库房、工厂车间等场景,货物堆放密集、人车混流频繁,盲区极易引发碰撞事故,360 度全景盲区无死角可视化预警辅助系统成为保障作业安全的关键装备。该系统在叉车车身四周安装 4 - 6 个高清超广角摄像头,实时捕捉货叉、车身两侧及后方的环境影像,通过 AI 图像拼接技术,将多路画面合成为无缝的 360 度全景鸟瞰图,清晰呈现在驾驶室内的显示屏上,让驾驶员无需频繁转头,即可掌握车身周围及货叉作业区域的细节。系统搭载智能识别算法,能区分行人、货架、其他设备等物体,当检测到人员进入货叉周边 7米的危险范围,或叉车转向、倒车时遇障碍物,会立即触发多级预警:驾驶室内发出语音提示与灯光闪烁,货叉附近的声光报警器同步发出警示,提醒周围人员远离。针对叉车作业中常见的低光照、粉尘多等环境,系统配备红外补光与抗干扰镜头,确保画面清晰稳定,即使在仓库角落或夜间作业,盲区风险也能被实时监测。乌兰察布360全景设计当人员闯入危险区域,佳兴伟诚360全景盲区监测系统的 AI 摄像头迅速捕捉并放大显示在屏幕上。

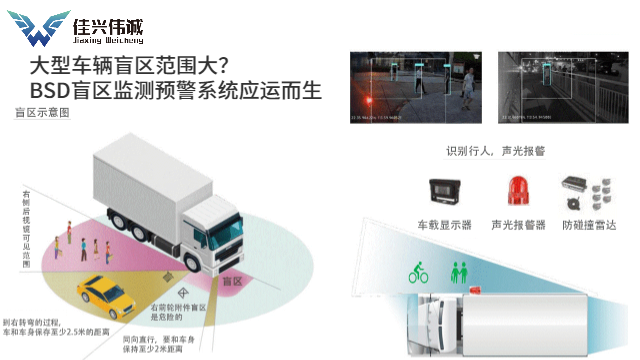
在重型工程机械主宰的复杂作业现场,巨大的车身结构天然形成了无数视觉死角,这些“盲区”如同潜伏的危机,时刻威胁着设备操作员、现场工作人员及周边环境的安全。工程车360全景全景盲区监测预警系统应运而生,它并非简单的影像拼接,而是一套融合感知技术与智能算法的主动安全解决方案。该系统通过环绕车身部署的高分辨率超广角鱼眼摄像头,结合先进的图像拼接、畸变校正与实时渲染算法,在驾驶室内的显示屏上无缝呈现车辆周围360度的“上帝视角”,彻底消除传统后视镜和驾驶员肉眼无法覆盖的视觉盲区。其关键价值在于将“被动观察”升级为“主动预警”,通过毫米波雷达或超声波传感器探测进入危险区域的动态与静态障碍物,并依据碰撞风险等级即时触发分级的声光警报(如蜂鸣、语音提示、屏幕闪烁、区域高亮),为操作员提供宝贵的决策与反应时间。这不是技术上的突破,更是工程机械安全文化的一次深刻变革,明显提升了作业现场的本质安全水平。
在城市道路行驶时,车辆侧方与后方盲区是事故高发区,佳兴伟诚的 AI 识别预警系统针对性解决这一痛点。当车辆准备变道,AI 系统会持续扫描两侧盲区,若此时有车辆快速接近,系统立即在对应后视镜区域亮起警示灯,同时车内扬声器发出 “禁止变道” 的语音警告。对于突然闯入盲区的行人,系统反应更迅速,0.3 秒内即可完成识别与预警,显示屏上会用红色方框锁定目标并闪烁,让驾驶员瞬间察觉危险。在早晚高峰的拥堵路段,系统还能区分静态障碍物与动态目标,避免对路边栏杆等物体误报,误报率控制在 3% 以下。支持 5G 网络传输,佳兴伟诚工程车 360 全景画面可实时同步至远程控制中心,实现远程协同作业指导。
佳兴伟诚科技开发的车载智能监控系统已应用于工程车盲区监控解决方案,装载机360度全景盲区监测驾驶辅助系统,压路机360度全景盲区监测驾驶辅助系统,渣土车360度全景盲区监测驾驶辅助系统,吊车360度全景盲区监测驾驶辅助系统,挖掘机360度全景盲区监测驾驶辅助系统,商砼搅拌车360度全景盲区监测驾驶辅助系统,电力抢修车360度全景盲区监测驾驶辅助系统,叉车360度全景盲区监测驾驶辅助系统,矿山车辆360度全景盲区监测驾驶辅助系统,半挂360度全景盲区监测驾驶辅助系统,货车、卡车360度全景盲区监测驾驶辅助系统,起重机360度全景盲区监测驾驶辅助系统,推土机360度全景盲区监测驾驶辅助系统,洒水车360度全景盲区监测驾驶辅助系统,工程车360度全景盲区监测驾驶辅助系统。360 全景盲区驾驶辅助系统为新手驾驶员提供极大帮助,降低驾驶难度。乌兰察布360全景找哪家
车辆360全景环视驾驶辅助系统,装上后给你上帝般的视角。乌兰察布360全景设计
环卫清洁车在城市环境维护中扮演着至关重要的角色,它们不辞辛劳地清扫街道、收集垃圾,为城市的整洁美丽付出努力。然而,由于环卫清洁车车身较大,存在众多盲区,在作业和行驶过程中极易引发安全事故,对环卫工人、其他道路使用者的生命安全构成威胁。为了有效解决这一问题,360 全景盲区预警系统应运而生,成为提升环卫清洁车安全性的关键技术。 360 全景盲区预警系统主要基于多个摄像头和先进的图像算法。在环卫清洁车的车身四周,包括车头、车尾、两侧后视镜下方等位置,安装多个高清摄像头。这些摄像头实时采集车辆周围的图像信息,并将其传输至中心处理器。中心处理器通过图像拼接算法,将各个摄像头的画面整合为一个完整的 360 度全景图像,呈现在驾驶室内的显示屏上。同时,系统利用图像识别技术,对车辆周围的物体进行检测和分析。当检测到有行人、车辆或其他障碍物进入盲区时,系统会根据距离和危险程度,及时发出不同级别的预警信号,如声音警报、屏幕闪烁提示等,提醒驾驶员注意潜在的危险。乌兰察布360全景设计