该设备集成了机器视觉与运动控制技术,构建出一套完整的贴盖解决方案。视觉系统通过特征提取和模式匹配识别容器定位点,引导机器人完成任意设定位置的贴盖任务。动力核 心为高速并联机器人,凭借其轻量化臂体与高刚性结构,实现每分钟100次的抓取周期,且运行平稳无抖动。定位精度严格控制于±0.05mm以内,角度偏差不超过±0.2°,保障盖体与瓶口完全吻合。涂胶路径经算法优化,连续平滑无拐点,显 著提升密封可靠性。设备兼容AC220V±10%电压波动,频率容许±5%偏差,适应多数工业场景。配备以太网、RS-232、RS485及CAN总线接口,支持多种工业协议,便于集成至现有自动化产线。以太网通信便于接入MES系统,实现生产信息化管理。浙江附近湿巾贴盖设备平台
若贝特湿巾贴盖设备基于视觉引导的并联机器人系统实现高精度贴合作业。视觉模块以每秒多帧的频率捕捉工件特征点,通过图像配准和坐标变换算法实时输出贴盖位置信息,支持非固定位置的柔性化生产。机械执行单元采用并联delta机器人,结构刚性强、动态响应快,能够以100次/分钟的节拍完成稳定抓放。重复定位精度达到±0.05mm(线性)和±0.2°(旋转),显 著降低装配误差。涂胶单元配备高精度点胶阀与轨迹规划器,确保胶线宽度一致、轨迹圆滑。设备电气设计符合AC220V±10%、50Hz±5%的输入要求,具备良好的电网适应性。通讯接口涵盖以太网、RS-232、RS485和CAN,可适配PLC、工控机及MES系统,实现远程监控与生产数据可追溯。江苏多功能湿巾贴盖设备平台若贝特湿巾贴盖设备单抓速度达100次/分钟,高效稳定,提升生产效率。
该设备集成了高精度视觉定位与高速机器人技术,适用于多样化湿巾包装的贴盖任务。视觉系统能够识别容器上的特征点并计算空间姿态,引导机器人在设定范围内完成任意点贴盖。并联机器人结构紧凑、响应快速,工作节拍达到100次/分钟,重复精度为±0.05mm和±0.2°。涂胶轨迹经过平滑处理,过渡自然,胶型完整密封性好。整机额定电压AC220V±10%,频率50Hz±5%,适应工业环境电压波动。设备提供以太网、RS-232、RS485和CAN接口,可实现多机协作和中 央控制,提升生产线整体自动化水平。
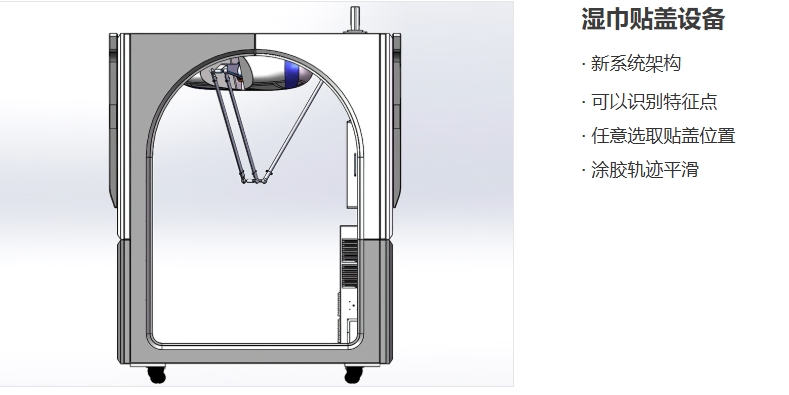
若贝特湿巾贴盖设备,科技引 领,智造未来。新系统架构搭载先进视觉识别技术,可快速捕捉特征点并智能确定任意贴盖位置,实现精 准柔性生产。并联机器人以100次/分钟的节拍高效作业,运行流畅平稳,其“平取平放”特性有效保护产品完整性。±0.05mm和±0.2°的超高重复定位精度,确保了贴盖的准确性和一致性,涂胶轨迹平滑美观。设备支持宽电压输入,并集成以太网、RS-232、RS485、CAN等多种通讯方式,具备强大的环境适应性和系统集成能力,助力企业轻松实现自动化升级,引 领行业创新发展。宽电压设计(AC220V±10%),适应电压波动,运行平稳。

若贝特湿巾贴盖设备通过其技术集成创新,提供了优异的贴盖解决方案。新系统架构结合了高分辨率视觉系统,能够快速识别并定位特征点,支持在三维空间内任意设定贴盖位置,满足灵活生产需求。并联机器人负责执行,以其每分钟100次的高速和平稳特性,在快速作业的同时确保产品表面无刮擦。设备具备±0.05mm和±0.2°的重复定位精度,涂胶轨迹流畅均匀,确保了密封的完整性与一致性。额定电压AC220V±10%和50Hz±5%的宽范围设计,加之完备的通讯接口(以太网、RS-232、RS485、CAN),使其具备强大的环境适应性和系统互联能力。RS485多节点网络节省布线成本,提高车间灵活性。江苏多功能湿巾贴盖设备平台
贴盖重复精度±0.05mm,有助于降低物料浪费和不良率。浙江附近湿巾贴盖设备平台
若贝特湿巾贴盖设备,精 准高效,驭见未来。智能新系统架构赋予设备视觉识别与自主决策能力,可精 准定位特征点并任意规划贴盖路径,实现智能化柔性生产。并联机器人以每分钟100次的极速节拍运行,动作平稳流畅,且轻柔操作确保产品表面完好无损。±0.05mm和±0.2°的超高精度控制,配合平滑均匀的涂胶工艺,打造完美密封效果。设备兼容宽范围电压波动,并集成以太网、RS-232、RS485、CAN等多种通讯接口,实现无缝集成和远程监控,助力企业轻松驾驭智能制造新时代。浙江附近湿巾贴盖设备平台