- 品牌
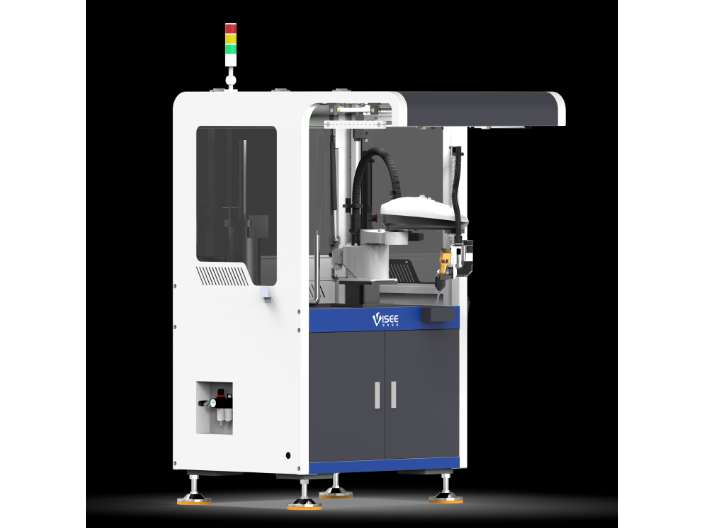
- VISEE,慧炬
- 型号
- G300
- 类型
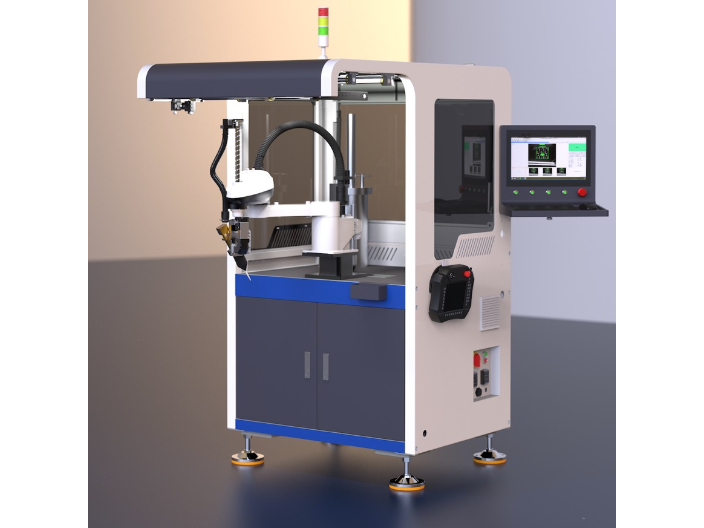
- 在线跟随点胶机
- X轴行程
- 450
- Y轴行程
- 380
- Z轴行程
- 200
- 最大负载
- 6
- 移动速度
- 1000
- 重复精度
- ±0.02
- 存储空间
- 128
- 气源
- 0.5-0.7
- 电源
- 220/50
- 功率
- 1500
- 最小吐出量
- 0.1
- 吐出时间调节
- 0.01
- 吐出频率
- 100
- 外形尺寸
- 1100*1400*1800
- 重量
- 500
- 产地
- 广州
- 厂家
- 慧炬智能
桌面式点胶机以紧凑的结构设计著称,通常占地面积在 1 平方米以内,适合放置在生产车间的工作台面使用。其机械臂行程一般在 300mm-500mm 之间,配备小型供胶系统和简易控制系统,兼顾了操作便捷性与点胶精度。这类设备广泛应用于小型电子元件的生产,如传感器封装、LED 灯珠固定等。在 LED 灯带的组装中,桌面式点胶机能沿着灯带线路,每隔 5mm 点涂一滴导热胶,胶量控制在 0.01ml 左右,既保证灯珠与基板的热传导效率,又避免胶水溢出污染其他部件。此外,桌面式点胶机的采购成本较低,维护方便,是中小批量生产企业的理想选择。点胶机搭载温度传感器,实时监测胶水温度,自动调节加热功率,保持胶水粘度稳定。广东视觉编程点胶机推荐厂家
点胶机
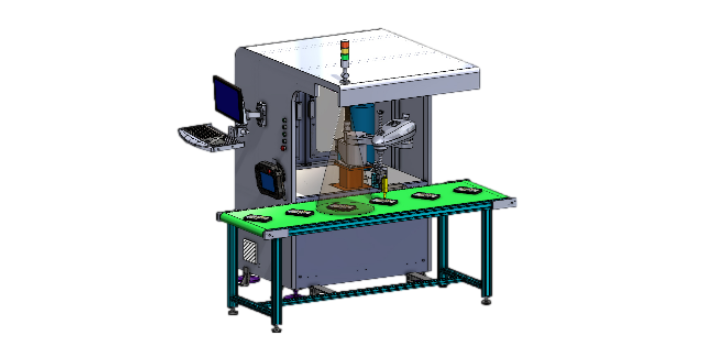
人机协作模式的引入,使点胶机在柔性生产中更具适应性。协作式点胶机器人配备力觉传感器,当与操作人员发生接触时,能在 0.1 秒内停止运动,接触力不超过 50N,确保人员安全。在小型电子产品的返修点胶中,工人可手持工件在机器人工作范围内自由移动,机器人通过视觉跟踪实时调整点胶位置,实现 “人动机器随” 的灵活作业模式,返修效率提升 50%。设备的安全防护系统还包括红外感应区域,当人员进入危险区域时自动降低运行速度,离开后恢复正常速度,兼顾了生产效率与操作安全。北京智能点胶机销售厂家压电喷射点胶机在医疗试纸条上点样,液滴体积 5nL 且重现性好,检测精度提升 20%。
动力电池极耳焊接前的预点胶工艺,是提升焊接质量的关键环节。点胶机在极耳与极片的连接位置点涂导电胶,胶点直径控制在 0.8mm±0.05mm,既保证焊接时的导电性,又能缓冲焊接应力,使极耳的剥离强度提升 40%。针对叠片电池的极耳对齐,点胶机通过视觉定位在极耳边缘点涂定位胶,胶点厚度 0.03mm,确保叠片过程中极耳的对齐误差不超过 0.1mm,减少焊接时的虚焊风险。预点胶系统还能控制胶水的固化速度,在焊接前保持适当粘性,焊接后快速固化,适应电池生产线的快节奏需求。
点胶机的工作原理基于流体控制与机械运动的准确配合。首先,胶水等流体材料被存储在针筒或压力桶中,通过气压、螺杆推送或活塞挤压等方式产生动力,将材料输送至点胶针头。同时,控制系统根据预设程序,驱动机械臂或工作台按照设定路径移动,使针头在产品指定位置完成点胶动作。在这一过程中,胶量的控制至关重要,通常通过调节压力大小、点胶时间、针头直径等参数实现。例如,对于微小电子元件的点胶,需将胶量控制在纳升级别,此时设备会通过高精度压力传感器与伺服电机的联动,确保每一滴胶水的体积误差不超过 ±5%,从而满足精密制造的需求。点胶机支持离线示教功能,通过手持盒记录点胶路径,操作简单易懂,适合小批量生产。

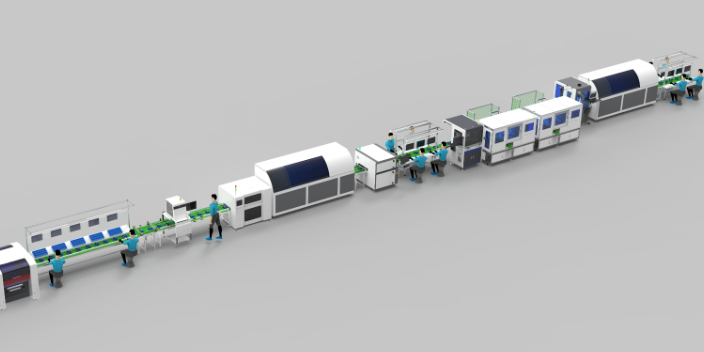
根据工作方式和应用场景的不同,点胶机可分为多种类型。手动点胶机操作简单,适合小批量、简单产品的点胶,成本较低但精度有限。半自动点胶机通过机械结构辅助定位,提高了点胶效率和一致性,适用于中等批量生产。全自动点胶机配备机械臂和视觉系统,可实现无人化操作,支持三维立体点胶,精度可达 0.01mm,广泛应用于电子行业的精密元器件封装。此外,还有专门针对特定流体的点胶机,如硅胶点胶机具有防固化功能,UV 胶点胶机配套固化设备,热熔胶点胶机带有加热装置。不同类型的点胶机各有侧重,能满足多样化的生产需求。多头点胶机同步作业,在玩具按键矩阵处同时点胶,生产效率较单头机提升 5 倍。上海选择点胶机推荐厂家
伺服点胶机在汽车线束连接器处点胶密封,胶层耐油污、耐老化,使用寿命达 10 年。广东视觉编程点胶机推荐厂家
点胶机的精度直接影响产品质量,定期校准是必不可少的环节。校准内容包括胶量精度和定位精度两方面。胶量校准通常采用称重法,在相同参数下连续点胶 10 次,用高精度电子天平(精度 0.1mg)称量每滴胶水的重量,计算平均值与标准差,要求单次胶量误差不超过 ±3%,标准差不大于 2%。定位精度校准需使用激光干涉仪或标准网格板,机械臂按预设路径移动,测量实际位置与理论位置的偏差,X、Y 轴定位误差应控制在 ±0.01mm 以内,重复定位误差不超过 ±0.005mm。校准过程中若发现精度超标,需检查机械臂的传动机构是否有磨损,伺服电机参数是否漂移,必要时进行机械调整或参数重新设定。校准结果需记录存档,作为设备状态评估的依据。广东视觉编程点胶机推荐厂家
- 广东底部填充点胶机建议 2026-05-14
- 惠州跟线点胶机排名 2026-05-14
- 陕西点胶机建议 2026-05-14
- 华东多头点胶机技术 2026-05-14
- 上海硅胶点胶机推荐 2026-05-14
- 天津汽车电子点胶机建议 2026-05-14
- 河北皮带跟随点胶机哪家好 2026-05-14
- 上海五轴点胶机公司 2026-05-14
- 广东热熔胶点胶机企业 2026-05-14
- 重庆四轴点胶机价格 2026-05-14
- 湖北高精度点胶机功能 2026-05-14
- 山东在线点胶机价格 2026-05-14