- 品牌
- 浙江三维大通
- 材料材质
- 铝,铝合金
- 工艺类型
- 模锻,精锻,自由锻,挤压
- 材料原始形态
- 棒料,铸锭,液态金属,金属粉末
- 变形温度
- 热锻,冷锻,温锻,等温锻压
- 表面处理
- 粉末喷涂,电镀,喷油,表面阳极氧化
- 加工贸易形式
- 来料加工,来图、来样加工,OEM加工
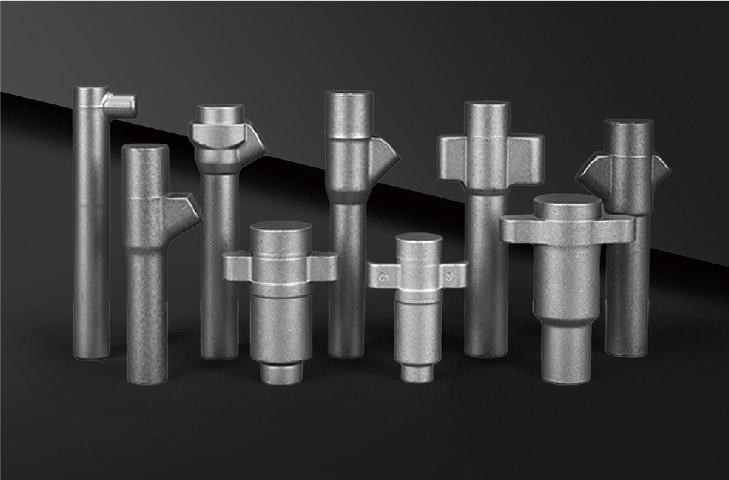
智能仓储机器人的驱动系统中,微型花键套是实现精细运动的**部件。这类花键套采用不锈钢材料,通过微型冷挤压工艺制造,外径*为 8mm,花键齿模数 0.2mm。其加工精度极高,齿距误差控制在 ±0.001mm,齿形误差 ±0.0005mm,与驱动电机轴和车轮轴的配合间隙小于 0.005mm。在机器人快速移动(速度达 2m/s)和频繁转向过程中,该微型花键套能实现高效动力传递,传动效率达 97%,且运行噪音低于 45dB。经 500 小时连续工作测试,磨损量几乎可忽略不计,确保智能仓储机器人长期稳定运行,提高仓储物流的自动化效率。花键套通过精密加工,确保与轴的紧密配合,传递强劲扭矩。舟山汽车铝合金花键套铝合金件

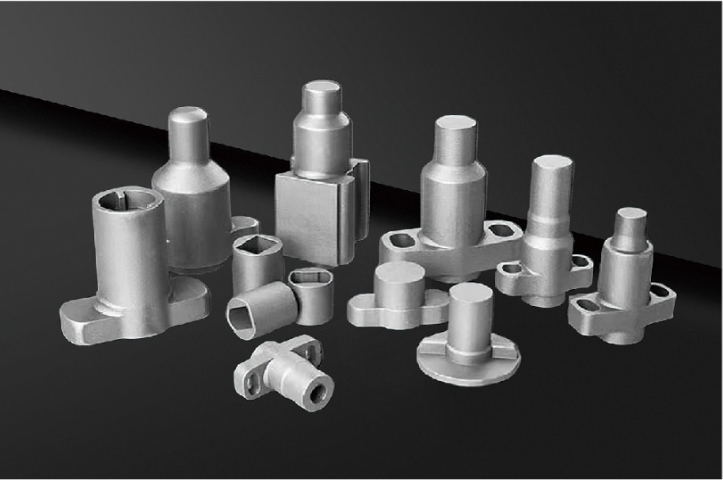
无人机的动力传输系统对花键套的轻量化与可靠性要求严苛。某型号长航时无人机的电机与螺旋桨连接部位,采用碳纤维增强树脂基复合材料制成的花键套。通过模压成型工艺,使花键套在保证结构强度的同时,重量比传统金属花键套减轻 60%。其齿形设计采用特殊的渐开线优化方案,齿侧间隙控制在 0.02 - 0.03mm,能在无人机电机 12000 转 / 分钟的高速运转下,稳定传递 50N・m 的扭矩。经风洞测试和 50 小时连续飞行验证,该花键套未出现松动、磨损现象,有效降低无人机动力系统的重量,提升续航能力,同时确保飞行过程中动力传输的可靠性。上海空气弹簧活塞花键套产品花键套与齿轮组配合,有效分散载荷,减少机械磨损。

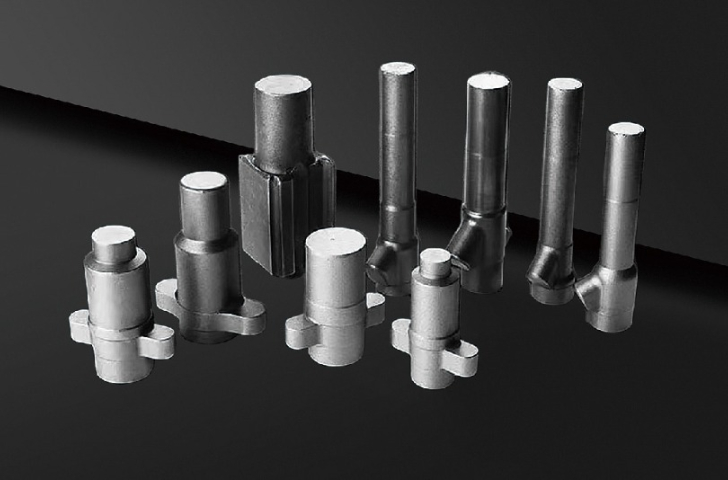
工业机器人:六轴工业机器人的腕部关节对花键套的精度和重复定位精度要求极高。一款用于电子装配的精密工业机器人,其腕部关节采用的花键套选用质量合金钢制造,经真空热处理消除残余应力,保证材料组织均匀性。通过磨齿加工,花键套的齿形误差控制在 ±0.002mm,齿距累积误差 ±0.005mm,齿面粗糙度 Ra<0.2μm。与关节轴采用过盈配合,过盈量 0.01 - 0.02mm,在机器人进行高速、频繁的关节运动(关节运动速度达 180°/s)和精密装配作业时,能够实现精细的动力传递和位置控制,重复定位精度达到 ±0.01mm。为适应机器人长时间连续工作需求,花键套表面进行特殊涂层处理,降低摩擦系数至 0.08,减少磨损。经 10000 小时连续运行测试,磨损量小于 0.01mm,确保了工业机器人作业的高精度和稳定性,满足电子、汽车零部件等行业对精密装配的严格要求,提高生产效率和产品质量。
机器人关节减速器中的花键套,对传动精度和疲劳寿命要求极高。采用高强度合金钢花键套,经渗碳淬火处理后,表面硬度达到 HRC62,有效硬化层深度 0.8 - 1.2mm,心部保持良好韧性。花键套通过精密磨齿加工,齿形精度达到 GB/T 10095.1 - 2008 中的 3 级标准,表面粗糙度 Ra<0.2μm。其与减速器齿轮和关节轴的配合间隙极小,传动时无空回,在机器人高速、频繁的关节运动中,能够实现精细的动力传递和位置控制,重复定位精度达到 ±0.01mm。同时,花键套的**度和高耐磨性使其疲劳寿命超过 10⁸次循环,经 5000 小时连续工作测试,无裂纹、无磨损,为机器人的长期稳定运行提供可靠保障,广泛应用于汽车制造、电子装配等自动化生产线。花键套的材料强度直接影响其负载能力,选材需谨慎。
电动摩托车的驱动系统中,花键套作为连接电机与后轮轴的关键部件,需兼顾轻量化与**度。某款高性能电动摩托车采用了镁合金花键套,材料选用 AZ91D 镁合金,通过压铸成型后进行 T4 + T6 热处理,抗拉强度达到 240MPa,重量较铝合金花键套减轻 30%。花键套的齿形采用渐开线设计,经数控加工中心铣齿和研磨,齿面精度达到 GB/T 1144 - 2001 的 7 级标准,与电机轴和后轮轴的配合过盈量控制在 0.02 - 0.03mm。在电动摩托车 0 - 100km/h 加速测试中,花键套可稳定传递 300N・m 的扭矩,传动效率达 96%,助力车辆实现快速、平稳的动力输出,同时减轻整车重量,提升续航里程。花键套的齿形精度决定传动效率,加工需严格把控公差。绍兴锻件花键套产品
花键套的键数设计,根据实际负载需求灵活调整。舟山汽车铝合金花键套铝合金件
工业自动化生产线的机械手臂关节处,花键套对实现灵活精细运动至关重要。采用**度铝合金花键套,通过压铸成型后进行数控精加工,花键的分度误差控制在 ±12″以内,齿向误差 ±0.002mm。该花键套与谐波减速器配合时,传动效率高达 96%,在机械手臂快速动作(关节运动速度达 150°/s)和频繁变向过程中,能够实现精细的动力传递和位置控制,重复定位精度达到 ±0.02mm。同时,花键套表面经阳极氧化处理,形成 20μm 厚的氧化膜,增强耐腐蚀性和耐磨性,经 10 万次循环动作测试,磨损量小于 0.01mm,保障了工业自动化生产线的高效稳定运行。舟山汽车铝合金花键套铝合金件
- 江苏空气弹簧活塞花键套 2025-09-19
- 台州花键套件 2025-09-18
- 盐城空气悬架铝合金件花键套厂 2025-09-18
- 连云港铝合金花键套产品 2025-09-17
- 南京铝合金花键套产品供应商 2025-09-17
- 江西花键套工艺视频 2025-09-17
- 丽水汽车花键套产品 2025-09-17
- 杭州汽车铝合金花键套产品供应商 2025-09-17