
随着科技的不断进步,食品检测设备也在持续创新升级。光谱分析技术、色谱技术、生物传感技术等先进技术被广泛应用于食品检测领域,使得检测更加高效、准确、灵敏。例如,基于纳米技术的传感器能够检测出极其微量的有害物质,为食品安全提供了更为可靠的保障。同时,智能化、自动化的食品检测设备也在逐渐普及,不仅提高了检...
目标跟踪基本参数
- 品牌
- 慧视科技
- 型号
- 可咨询
- 输出信号
- 数字型,定制
- 制作工艺
- 集成,薄膜,陶瓷,可定制
- 材质
- 可定制
- 材料物理性质
- 导体,磁性材料,定制
- 材料晶体结构
- 定制
- 加工定制
- 是
目标跟踪企业商机
另外,经典的跟踪方法还有基于特征点的光流跟踪,在目标上提取一些特征点,然后在下一帧计算这些特征点的光流匹配点,统计得到目标的位置。在跟踪的过程中,需要不断补充新的特征点,删除置信度不佳的特征点,以此来适应目标在运动中的形状变化。本质上可以认为光流跟踪属于用特征点的来表征目标模型的方法。在深度学习和相关滤波的跟踪方法出现后,经典的跟踪方法都被舍弃,这主要是因为这些经典方法无法处理和适应复杂的跟踪变化,它们的鲁棒性和准确度都被前沿的算法所超越,但是,了解它们对理解跟踪过程是有必要的,有些方法在工程上仍然有十分重要的应用,常常被当作一种重要的辅助手段。RK3588跟踪板如何实现目标的识别及跟踪?无源目标跟踪检测
目标跟踪
“启明935A”系列芯片已经成功点亮,并完成各项功能性测试,达到车规级量产标准。启明935A是行业首颗基于Chiplet(芯粒/小芯片)异构集成范式的自动驾驶芯片,但并非单一芯片,而是一个家族系列。启明935HUBChiplet可以和不同数量的大熊星座AIChiplet互相搭配,再结合灵活的封装方式,快速形成不同性能等级的SoC芯片。它还支持高带宽的PBLink多芯互连,双芯双向带宽128GB/s,四芯双向带宽64GB/s。启明935A每颗芯片都支持比较大20路的1080p60摄像头输入,可应用于各类端侧AI部署。得益于大熊星座NPU天然支持Transformer结构,初步支持的模型有Yolo系列、ResNet50、PSPNet、PointNet++、TrafficSign_Retinanet、BevDet、miniCPM、Unet_ResNet50、PointPillars、PillarNest、M2track、BevFusion、PaliGemma、LLaMa-3B、8B等等。安全目标跟踪检测跟踪板卡的定制哪家比较好?

长时间一直进行这样的图像标注工作,那无疑是枯燥而乏味的,手酸不说,更多的是精神上的折磨,进而效率大打折扣。但这又是算法提升的必要途径,无法跳过,当项目紧急时,甚至需要多人加班加点赶进度。这样的痛苦现状急需改变!慧视光电的算法工程师为了提高这一的效率,开发了一个深度学习算法开发平台SpeedDP。它的基本逻辑是基于一个手动标注一定量的数据集进行训练,形成一个可用的预选模型(如果已有模型可以直接使用),然后训练一定阶段后,可以评估此模型的能力,如果能够满足使用就可以对相同目标的新数据集(未进行任何标注)进行AI自动化标注。这一过程的省去了大量需要对新数据集的手动拉框工作,同时也在不断反哺此模型算法,帮助提升性能。
无人机在高速公路巡检中的作用越来越突出,特别是在十一黄金周这样的出行高峰,高速公路的安全和畅通至关重要。传统的巡检模式受到人力物力以及时空的限制,弊端很大,难以实现精细大面积的监控疏导。无人机灵活机动的特点则能够很好的弥补时空的局限,而想要进一步减少人力物力的付出,则需要打造智能化的无人机,通过AI赋能,让无人机更加聪明。打造智能化无人机可以在无人机吊舱的基础上加装高性能的AI图像处理设备,成都慧视开发的Viztra-HE030图像处理板凭借6.0TOPS的算力,用在十一黄金周这样的出行高峰期就能够很好地胜任工作,板卡采用了国产化芯片RK3588,在算法的赋能下,能够实现高效巡检。慧视光电开发的慧视AI图像处理板,采用了国产高性能CPU。

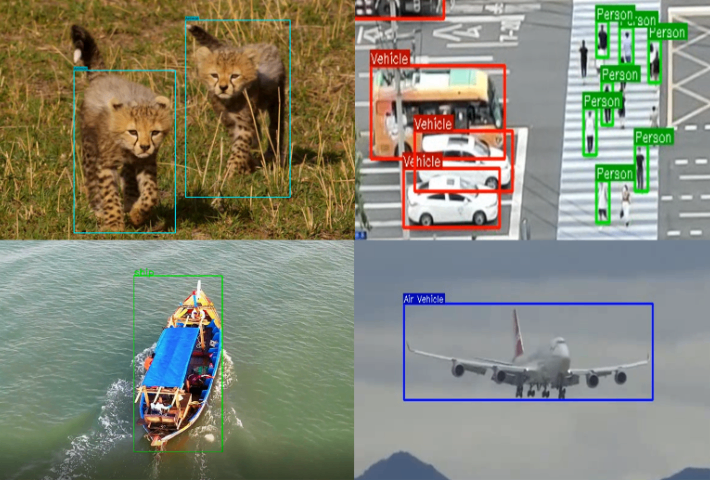
目标识别算法是一种深度学习算法,其聪明程度需要我们不断训练,这就得益于大量的图像标注,通过对车辆行驶环境的数据集的大量标注,能够让AI更加聪明,标注得越多,识别的精度就可能越高。但是大量的图像标注跟工作显然会耗费大量的时间精力。而慧视SpeedDP的出现很好地解决了这个问题。SpeedDP是一个深度学习AI算法训练开发平台,他能够通过现有的算法模型或者自训练一个算法模型,实现对新数据集的快速AI自动标注,以此反复,帮助使用者提升算法性能。能够有效节约大量的时间。慧视光电开发的RK3588跟踪板智能目标识别及追踪,让目标无处可藏。无源目标跟踪检测
全国产化智能处理板应用广阔。无源目标跟踪检测
在许多领域,无人机的作业环境相对复杂,需要识别处理图像背景目标众多,这种环境下,要想实现更高精度的检测识别效果,图像处理板的性能至关重要。在慧视光电开发的多款图像处理板中,Viztra-HE030图像处理板以6.0TOPS得以胜任。这款板卡采用了瑞芯微旗舰级芯片RK3588,8nmLP制程,搭载八核64位CPU,主频高达2.4GHz。集成ARMMali-G610MP4四核GPU,内置AI加速器NPU,支持主流的深度学习框架。性能强劲的RK3588可为无人机AI识别的应用场景带来更强大的性能表现。无源目标跟踪检测
与目标跟踪相关的文章

放心目标跟踪互惠互利
- 光纤数据目标跟踪 2026-05-13
- 湖南国产目标跟踪 2026-05-13
- 湖北可靠目标跟踪 2026-05-12
- 福建目标跟踪生产企业 2026-05-11
- 流畅目标跟踪参考价格 2026-05-11
- 辽宁目标跟踪销售厂家 2026-05-11
- 浙江高性能目标跟踪 2026-05-11
- 云南人防目标跟踪 2026-05-11
- 国产目标跟踪 2026-05-10
- 广东目标跟踪市场报价 2026-05-10
- 浙江什么目标跟踪 2026-05-10
- 质量目标跟踪联系方式 2026-05-10
与目标跟踪相关的产品


与目标跟踪相关的新闻
-
河南目标跟踪参考价格 2026-05-09 17:01:27长时间一直进行这样的图像标注工作,那无疑是枯燥而乏味的,手酸不说,更多的是精神上的折磨,进而效率大打折扣。但这又是算法提升的必要途径,无法跳过,当项目紧急时,甚至需要多人加班加点赶进度。这样的痛苦现状急需改变!慧视光电的算法工程师为了提高这一的效率,开发了一个深度学习算法开发平台SpeedDP。它的...
-
福建快速目标跟踪 2026-05-09 13:01:04利用无人机实现智能化识别能够帮助我们提升许多工作效率,在很多行业都有应用。像安防巡检、交通管理等,飞在高空的无人机比传统的地面巡逻更有视野,更能搜集掌握全局信息,再通过和地面巡逻的配合,能够有效减少工作量。但是在无人机识别的过程中会遇到很多问题,比如当环境变得复杂时,识别的精度可能就会受到影响。AI...
-
新疆目标跟踪批发商 2026-05-09 16:01:06利用无人机实现智能化识别能够帮助我们提升许多工作效率,在很多行业都有应用。像安防巡检、交通管理等,飞在高空的无人机比传统的地面巡逻更有视野,更能搜集掌握全局信息,再通过和地面巡逻的配合,能够有效减少工作量。但是在无人机识别的过程中会遇到很多问题,比如当环境变得复杂时,识别的精度可能就会受到影响。AI...
-
黑龙江目标跟踪多少钱 2026-05-09 16:01:06无人机在高速公路巡检中的作用越来越突出,特别是在十一黄金周这样的出行高峰,高速公路的安全和畅通至关重要。传统的巡检模式受到人力物力以及时空的限制,弊端很大,难以实现精细大面积的监控疏导。无人机灵活机动的特点则能够很好的弥补时空的局限,而想要进一步减少人力物力的付出,则需要打造智能化的无人机,通过AI...
与目标跟踪相关的问题
新闻资讯
产品推荐
-

安徽人脸识别图像识别模块专业
2026-05-27 -

西藏快速图像标注应用
2026-05-27 -
吉林自主研发图像识别模块AI智能
2026-05-27 -

自主识别图像识别模块软件
2026-05-27 -
山东边海防图像识别模块研发
2026-05-27 -

重庆低功耗图像识别模块识别
2026-05-27 -

四川工业级图像识别模块板卡公司
2026-05-27 -
山东自主可控图像标注技术
2026-05-27 -
贵州人脸识别图像识别模块AI智能
2026-05-27