瑞芯微推出的RK3588系列图像处理板作为国产化板卡的性能前列,成为了各领域研究开发的优先,它能在诸多行业实现目标检测、识别以及跟踪等功能,具有重要的研究开发价值。特别是对于高校而言,将RK3588作为课题进行研究开发,是一个不错的选择。但是在这些功能实现过程中,算法的能力就十分重要,如何让算法更加...
目标跟踪基本参数
- 品牌
- 慧视科技
- 型号
- 可咨询
- 输出信号
- 数字型,定制
- 制作工艺
- 集成,薄膜,陶瓷,可定制
- 材质
- 可定制
- 材料物理性质
- 导体,磁性材料,定制
- 材料晶体结构
- 定制
- 加工定制
- 是
目标跟踪企业商机
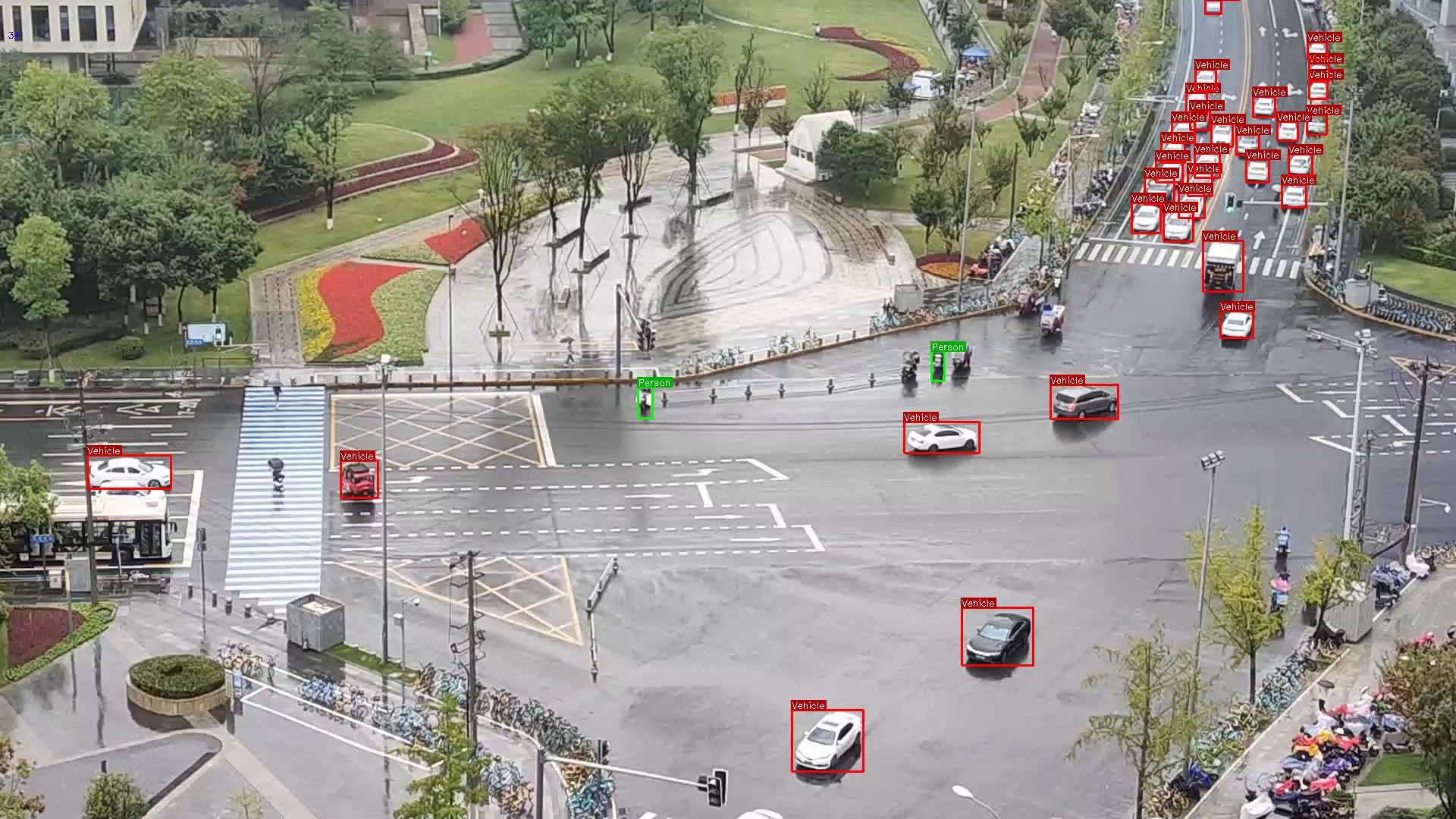
随着社区等安防向着智能化的进一步发展,越来越多的领域对传统意义上的视频监控提出了更加的严格要求,虽然传统监控系统已经可以满足人们“眼见为实”的要求,但同时这种监控系统要求监控人员不得不始终看着监视屏幕,获得视频信息,通过人为的理解和判断,才能得到相应的结论,做出相应的决策。因此,让监控人员长期盯着众多的电视监视器成了一项非常繁重的任务。特别在一些监控点较多的情况下,监控人员几乎无法做到完整的监控。工程师以RK3399PRO核心板为基础进行定制开发,让摄像头更加智能高效,能够输出高清流的图像视频。甘肃移动目标跟踪
目标跟踪
在很长一段时间内,传统的粮库害虫检查方法是依靠人工巡检,用肉眼观察,逐仓筛查的方法,这种方法覆盖面不足且效率低下,筛查一次将耗费工作人员的大量时间精力。随着技术的发展,AI化的筛查逐步采用,通过算法的AI识别实现自动化筛查。方法基于高像素高清摄像机,实时远程监控粮库,一旦发现害虫就能够立即向管理平台发出告警,有效降低巡检成本和压力,提升工作效率。这之中,实现AI识别处理的传感器同样重要,面对复杂的粮库环境,一个高性能能够快速处理数据的图像处理板是关键。黑龙江可靠目标跟踪慧视光电开发的慧视AI图像处理板,采用了国产高性能CPU。

目标运动估计是根据目标在过去的位置对目标的运动规律加以总结,并以此对目标将来的运动状态进行预测。正确的预测,可以缩小匹配的计算区域,大幅的降低匹配计算量。在视频跟踪系统中由于被跟踪的目标处于运动状态,为了把目标始终保持在摄像机视野之内,必须对摄像机加以控制。在实际应用中,摄像机被固定在云台上,云台本身不做平移运动,但可以控制云台进行水平摆动和上下俯仰,从而带动摄像机做相应运动。所以,对摄像机的控制就是对云台的控制。
SpeedDP作为一个服务型AI平台,它能提供从数据标注、模型训练、测试验证到RockChip嵌入式硬件平台模型部署的可视化AI开发功能。平台所需算法并不是固定的,使用者可以根据自身实际应用场景进行AI算法的定制化开发,例如平台经过不断的迭代,目前能够支持YOLOv8系列算法进行图像标注。SpeedDP这个平台使用起来十分简便,在图像标注领域其基本使用方法是:1.首先有一个比较好的预选模型2.用这个预选模型做自动标注3.后期人工审核修正RV1126图像处理板识别概率超过85%。

无人机追逐识别可以用在许多领域,如军备、安防。通过专业传感器设备的植入,让摄像头智能化,就可以对无人机进行追踪识别。成都慧视作为一家深耕图像处理领域的企业,在这方面也有着丰富的解决经验。在硬件领域,我们能够定制开发不同接口的图像处理板,如CVBS、SDI、LVDS、DVP、USB、Cameralink等,只要您提出需求,我们就能通过应用场景需要定制合适的接口。这是进行无人机识别的基础条件。目前,成都慧视能够提供不同等级算力的图像处理板,RV1126、RK3399Pro、RK3588等系列,满足多场景、广领域。RK3588处理板,智慧视觉应用开发板。省时省力目标跟踪设备
成都慧视开发的RK3588跟踪板怎么样啊?甘肃移动目标跟踪
视觉跟踪技术是计算机视觉领域(人工智能分支)的一个重要课题,有着重要的研究意义;且在导弹制导、视频监控、机器人视觉导航、人机交互、以及医疗诊断等许多方面有着广泛的应用前景。随着研究人员不断地深入研究,视觉目标跟踪在近十几年里有了突破性的进展,使得视觉跟踪算法不只是局限于传统的机器学习方法,更是结合了近些年人工智能热潮—深度学习(神经网络)和相关滤波器等方法,并取得了鲁棒(robust)、精确、稳定的结果。甘肃移动目标跟踪
与目标跟踪相关的文章
光纤数据目标跟踪
- 湖南国产目标跟踪 2026-05-13
- 湖北可靠目标跟踪 2026-05-12
- 福建目标跟踪生产企业 2026-05-11
- 流畅目标跟踪参考价格 2026-05-11
- 辽宁目标跟踪销售厂家 2026-05-11
- 浙江高性能目标跟踪 2026-05-11
- 云南人防目标跟踪 2026-05-11
- 国产目标跟踪 2026-05-10
- 广东目标跟踪市场报价 2026-05-10
- 浙江什么目标跟踪 2026-05-10
- 质量目标跟踪联系方式 2026-05-10
- 新疆目标跟踪产品 2026-05-09
与目标跟踪相关的产品


与目标跟踪相关的新闻
-
福建快速目标跟踪 2026-05-09 13:01:04利用无人机实现智能化识别能够帮助我们提升许多工作效率,在很多行业都有应用。像安防巡检、交通管理等,飞在高空的无人机比传统的地面巡逻更有视野,更能搜集掌握全局信息,再通过和地面巡逻的配合,能够有效减少工作量。但是在无人机识别的过程中会遇到很多问题,比如当环境变得复杂时,识别的精度可能就会受到影响。AI...
-
新疆目标跟踪批发商 2026-05-09 16:01:06利用无人机实现智能化识别能够帮助我们提升许多工作效率,在很多行业都有应用。像安防巡检、交通管理等,飞在高空的无人机比传统的地面巡逻更有视野,更能搜集掌握全局信息,再通过和地面巡逻的配合,能够有效减少工作量。但是在无人机识别的过程中会遇到很多问题,比如当环境变得复杂时,识别的精度可能就会受到影响。AI...
-
黑龙江目标跟踪多少钱 2026-05-09 16:01:06无人机在高速公路巡检中的作用越来越突出,特别是在十一黄金周这样的出行高峰,高速公路的安全和畅通至关重要。传统的巡检模式受到人力物力以及时空的限制,弊端很大,难以实现精细大面积的监控疏导。无人机灵活机动的特点则能够很好的弥补时空的局限,而想要进一步减少人力物力的付出,则需要打造智能化的无人机,通过AI...
-
低压线目标跟踪设备 2026-05-09 15:01:05在许多领域,无人机的作业环境相对复杂,需要识别处理图像背景目标众多,这种环境下,要想实现更高精度的检测识别效果,图像处理板的性能至关重要。在慧视光电开发的多款图像处理板中,Viztra-HE030图像处理板以6.0TOPS得以胜任。这款板卡采用了瑞芯微旗舰级芯片RK3588,8nmLP制程,搭载八核...
与目标跟踪相关的问题
新闻资讯
产品推荐
-

视觉算法图像识别模块定制方案
2026-05-16 -

西藏智能化目标检测
2026-05-16 -

重庆视频目标检测技术
2026-05-16 -
甘肃目标检测价格信息
2026-05-16 -
湖北仓储视频压缩与传输专业方案
2026-05-16 -

辽宁窄带视频压缩与传输多路
2026-05-16 -

北京快速目标检测解决
2026-05-16 -
宁夏人防目标检测多少钱
2026-05-15 -
海南电力应急目标检测销售厂家
2026-05-15