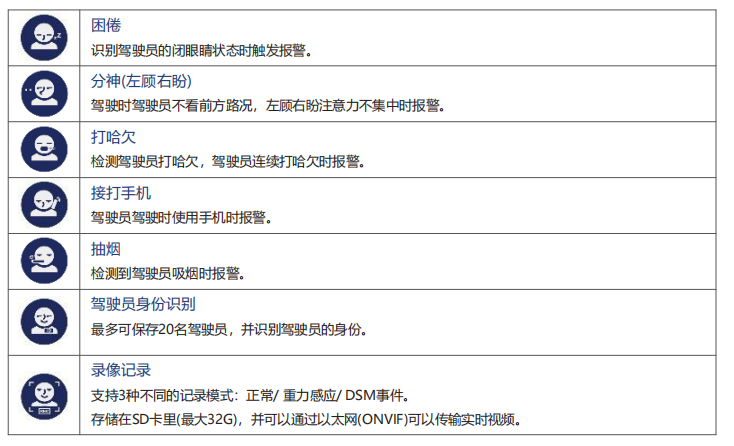
在车侣DSMS疲劳驾驶预警系统中,摄像头的作用主要是采集驾驶员的面部特征、头部和眼部等动作信息,然后进行判断和分析。通过实时监测驾驶员的疲劳状态和其他不良驾驶行为,当侦测到驾驶员的行为将会对驾驶安全不利时,系统就会迅速预警显示,将危险信号传达给驾驶员,以达到及时纠正和避免事故发生的目的。摄像头通过对驾驶员面部特征、头部和眼部等动作的监测,可以判断出驾驶员是否出现疲劳状态。这是因为在疲劳状态下,驾驶员的面部表情和身体动作会发生变化,比如眼睛闭合时间增加、头部低下等。通过对这些信息的捕捉和分析,可以有效地识别出驾驶员的疲劳状态。此外,摄像头还可以用于记录驾驶员的驾驶操作。通过对长途旅行中驾驶员操作的变化进行识别,可以判断出驾驶员是否出现疲劳驾驶。一般来说,驾驶员在疲劳驾驶时,操作频率会变低,转向操作轻微而且急骤。通过对这些行为特征的分析,可以进一步提高预警的准确性。总之,在疲劳驾驶预警系统中,摄像头的作用主要是采集驾驶员的状态信息,并进行判断和分析。通过实时监测驾驶员的疲劳状态和其他不良驾驶行为,系统可以迅速预警显示,将危险信号传达给驾驶员,从而有效地避免事故的发生。 疲劳驾驶预警系统融合MDVR系统,通过信息共享,联动预警和综合分析,实现对驾驶员疲劳状态的实时监测和预警.物联网司机行为检测预警系统厂家供应
车侣DSMS疲劳驾驶预警系统集成AEB(自动紧急制动)的应用意义在于进一步提高驾驶安全性,有效避免追尾和侧翻等交通事故。AEB系统是一种主动安全技术,通过雷达或摄像头感知前方碰撞风险,通常可识别车辆、行人或其他交通参与者。在感知到碰撞风险时,AEB系统会向驾驶员预警,当驾驶员没能采取刹车措施时,系统自动进行减速或刹车,以保持安全行驶距离,避免发生碰撞。对于疲劳驾驶预警系统来说,集成AEB功能可以更加有效地防止驾驶员在疲劳状态下无法及时对危险做出反应而导致的交通事故。当驾驶员出现疲劳状态时,AEB系统可以迅速感知前方风险并采取紧急制动措施,从而避免了追尾或侧翻等危险情况的发生,保护了驾驶员和乘客的安全。此外,AEB系统的集成也可以提高车辆的智能化程度,使车辆具备更强的主动安全性能,有助于提高道路交通的安全水平。同时,对于物流企业和运输公司等应用场景,集成AEB的车辆可以在保证货物运输安全的同时,减少因交通事故带来的损失和延误等问题。需要注意的是,AEB系统的集成和疲劳驾驶预警系统的应用需要与车辆的其他安全配置如安全带、ABS等配合使用,以提高整体的安全。同时,也需要对驾驶员进行相应的培训和教育。 机车司机行为检测预警系统方案商疲劳驾驶预警系统实现ONVIF视频输出的技术,涉及到视频捕捉,处理,传输及符合ONVIF协议标准的接口设计.

疲劳驾驶预警系统相关法规《中华人民共和国道路运输条例》第二十八条规定:客运经营者、货运经营者应当加强对从业人员的安全教育、职业道德教育,确保道路运输安全。道路运输从业人员应当遵守道路运输操作规程,不得违章作业。《道路旅客运输及客运站管理规定》第四十六条规定:客运经营者应当加强对从业人员的安全、职业道德教育和业务知识、操作规程培训。并采取有效措施,防止驾驶人员连续驾驶时间超过4个小时。《道路货物运输及站场管理规定》第二十条规定:道路货物运输经营者应当按照国家有关规定在其重型货运车辆、牵引车上安装、使用行驶记录仪,并采取有效措施,防止驾驶人员连续驾驶时间超过4个小时。《道路运输从业人员管理规定》第三十八条规定:经营性道路客货运输驾驶员和道路危险货物运输驾驶员不得超限、超载运输,连续驾驶时间不得超过4个小时。另外,《道路交通安全法实施条例》第六十二条第七款规定:驾驶机动车不得有连续驾驶机动车超过4小时未停车休息或者停车休息时间少于20分钟的行为,对违反法律规定的,公安交管部门可依法处罚。这些法规都对疲劳驾驶进行了明确的限制和处罚规定,旨在确保驾驶员的安全和道路交通的安全。
车侣DSMS疲劳驾驶预警系统集成超声波雷达的应用价值主要体现在以下几个方面:探测精度和可靠性:超声波雷达具有高精度和高可靠性的特点,可以在恶劣的环境中工作,提供高精度的位置信息。在汽车领域,超声波雷达可以用于探测车辆周围的障碍物,为驾驶员提供的停车和行车信息,帮助驾驶员更轻松地完成泊车操作,提高行车安全性。防水和防尘性能:超声波雷达具有防水、防尘等优势,可以在恶劣的环境中工作,不受泥沙遮挡的影响。探测范围:超声波雷达的探测范围在,可以满足泊车辅助等应用场景的需求。成本和安装优势:与其他传感器相比,超声波雷达的成本和安装成本较低,不需要精确校准和对准,也不需要使用任何复杂的算法进行数据处理。数据处理和算法支持:超声波雷达的信号处理算法相对简单,易于实现,同时也可以通过软件进行优化和控制,进一步提高了探测准确性和稳定性。综上所述,疲劳驾驶预警系统集成超声波雷达的应用价值在于提高行车安全性、提高探测精度和可靠性、降低成本和安装难度、提供探测范围等方面,是一种重要的主动安全技术。 自带算法的疲劳驾驶预警系统,利用神经网络人工智能视觉算法对驾驶员的脸部,眼部,体态等特征进行智能分析.
车侣DSMS疲劳驾驶预警系统集成盲区预警的意义在于提高驾驶安全性,减少因盲区导致的碰撞和刮擦事故。车辆盲区是指驾驶员在正常驾驶位置无法看到的区域,包括前盲区、后盲区、侧盲区和AB柱盲区等。由于驾驶员无法直接观察到这些区域内的物体,因此很容易导致交通事故的发生。疲劳驾驶预警系统集成盲区预警功能,可以通过车辆前视图车载夜视辅助驾驶系统和周视车身盲点监测系统监控盲区,当检测到盲区内出现障碍物或车辆时,及时向驾驶员告警,同时提供相应的预警提示,以便驾驶员及时采取相应措施,避免碰撞和刮擦事故的发生。此外,疲劳驾驶预警系统还可以通过其他传感器和检测方法,如驾驶员面部表情、眼部信号、头部运动性等生理特征的检测,以及车辆状态信息的监控等,综合判断驾驶员的疲劳状态并进行预警。这些信息可以与盲区预警功能相互配合,形成精确的驾驶安全预警体系,提高驾驶安全性。 疲劳驾驶预警系统的准确率如何提升?内蒙古工程车司机行为检测预警系统
司机行为监测预警,安装在车内合适位置,如驾驶员正前方的仪表盘上方,以便准确捕捉驾驶员面部表情和眼部动作.物联网司机行为检测预警系统厂家供应
(专辑一)自带算法的疲劳驾驶预警系统的技术原理主要基于先进的视觉识别技术和深度学习算法。
一、核XIN技术与流程视觉识别技术:系统通过安装在车内的摄像头实时捕捉驾驶员的面部及肢体动作,如眼睛闭合、眨眼频率、打哈欠、头部姿态等。摄像头捕捉到的图像会被快速传输到系统的处理单元。系统利用深度学习技术对这些图像数据进行处理和分析。通过深度卷积神经网络(CNN)等算法提取面部关键区域的视觉特征,如眼睛、嘴巴等。算法会分析眼睛的开合程度、闭合时间、眨眼频率以及打哈欠的频率等关键指标。基于这些分析,系统准确地判断驾驶员是否处于疲劳状态。
二、算法模型构建数据收集:为了构建有效的算法模型,需要收集大量关于疲劳驾驶时驾驶员面部和身体特征的图像数据。这些数据应包括不同驾驶员在不同疲劳程度下的表现,以确保算法的泛化能力和准确性。利用深度学习技术从图像数据中提取与疲劳相关的关键特征,并进行分类标注。这些特征包括眼睛的开合程度、眨眼频率、打哈欠的频率等。使用标注好的数据对算法模型进行训练,通过不断调整和优化模型参数,提高模型的准确性和鲁棒性。在训练过程中,会采用交叉验证等方法来评估模型的性能,确保其在不同场景下的适用性。
物联网司机行为检测预警系统厂家供应