
- 品牌
- 博手
- 型号
- 齐全
- 类型
- 微耕机,**器,铧式犁,圆盘犁,开沟机,旋耕机,浅松机
- 加工定制
- 是
- 动力类型
- 电动
- 适用领域
- 农业
- 产地
- 江苏
生产实现自动化的发展的体现.使用搬运机器人可以代替4-5人作业,并在安全方面也起到了很重要的作用,在无故障的情况下可一直连续操作,效率会明显高于人力,按长期算,自动化设备可以减少很多成本。那么,你知道搬运机器人怎么操作吗?下面小编来讲解下:它的运用很广,在操作过程中比较有讲究,一般要遵循1-7个规范,搬运机器人一般都是用作机床或其他机械的附加装置,比如自动机床或自动生产线上装卸和传递工件,在加工中心中更换刀具等,一般没有单独的控制装置。有些操作装置需要由人直接操纵,如用于原子能部门操持危险物品的主从式操作手也常称为机械手。机器人设备厂家,请您致电连云港建博自动化设备有限公司。黑龙江塑料机粉碎轴焊接机器人设备
机器人
国际上对机器人的概念已经逐渐趋近一致。一般来说,人们都可以接受这种说法,即机器人是靠自身动力和控制能力来实现各种功能的一种机器。**标准化组织采纳了美国机器人协会给机器人下的定义:“一种可编程和多功能的操作机;或是为了执行不同的任务而具有可用电脑改变和可编程动作的专门系统.”它能为人类带来许多方便之处!robot,原为robo,意为奴隶,即人类的仆人。作家罗伯特创造的词汇.机器人一般由执行机构、驱动装置、检测装置和控制系统和复杂机械等组成.黑龙江塑料机粉碎轴焊接机器人设备机器人哪家优惠?请您致电连云港建博自动化设备有限公司。

此外,轴焊接机器人还可以在高空、狭小的空间内进行焊接,提高了施工的安全性和效率。机械制造行业机械制造行业需要大量的焊接工作,而传统的手工焊接效率低下、质量难以保证。而轴焊接机器人可以通过预设程序,实现高效、精细的焊接,提高了生产效率和产品质量。此外,轴焊接机器人还可以在复杂的形状和结构下进行焊接,提高了生产的灵活性和效率。总之,轴焊接机器人已经成为了许多行业的必备设备,它可以提高生产效率、保证产品质量、提高生产灵活性和安全性。如果您的企业还没有使用轴焊接机器人,那么现在就是时候考虑引进了。
人的精力是有限的,但是企业在批量生产产品的时候工作量非常大,当一个工人反复重复一个动作时,体力上的消耗是巨大的,当精力消耗严重时,动作的速度和精确度就无法满足生产的需要。好用的上下料机械手没有神经系统,只要保证良好的维护并设定好程序,就能不知配备的工作,直到停机为止。上下料机器人企业可以使用上下料机械手来代替人工就是因为,上下料机械手只要设定好程序就能周而复始的进行上下料过程中的各项动作,并且每次动作都可以保持很高的准确度,此外,上下料机器人也能在各种恶劣的环境中工作,所以可以替代大部分的人工作业。装配是一个比较复杂的作业过程,不仅要检测装配作业过程中的误差,而且要试图纠正这种误差。机器人价钱多少?请您致电连云港建博自动化设备有限公司。

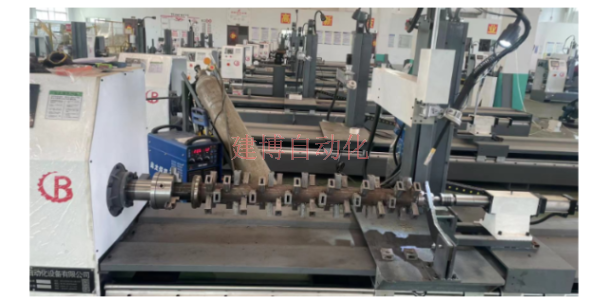
由于所设计的焊接机器人是在准平面、空间狭窄的环境下工作,为了保证机器人能根据电弧传感器的偏差信息,跟踪焊缝自动焊接,要求所设计的机器人应该结构紧凑、移动灵活且工作稳定.文中针对狭窄空间特点,开发了一种小型移动焊接机器人,根据机器人各结构的运动特点,运用模块化设计方法,把机器人机构分为轮式移动平台、焊炬调节机构和电弧传感器三部分。其中,轮式移动平台由于其惯性大,响应慢,主要对焊缝进行粗跟踪,焊炬调节机构负责焊缝精确跟踪,电弧传感器完成焊缝偏差实时识别.另外,机器人控制器和电机驱动器集成安装于机器人移动平台上,使其体积更小。同时,为了减少恶劣焊接环境下粉尘对运动部件影响,采用全封闭式结构,提高其系统可靠性[2机器人哪个好?请您致电连云港建博自动化设备有限公司。山西旋耕机焊接机器人厂家
机器人设备报价,请您致电连云港建博自动化设备有限公司。黑龙江塑料机粉碎轴焊接机器人设备
工业机器人主要有三大零部件:精密减速器、控制器以及伺服电机,六轴焊接机器人,其中减速器和端伺服电机被一直国外几家大公司垄断,建博焊接机器人,很多国内企业尚不具备零部件自产能力,而零部件占整个机器人总成本的80%以上,是产业链中利润高的一环,所以整体来看,国产机器人在零部件使用成本上相对国外机器人没有优势。公司通过在控制器以及伺服系统上的技术积累,焊接机器人,在这两大部分已经可以做到完全自给自足。减速器方面,也有了一定的技术上的突破,自产的减速器目前已经应用到了自主生产的六轴机器人内。焊接机器人黑龙江塑料机粉碎轴焊接机器人设备

机器人是自动控制机器的俗称,自动控制机器包括一切模拟人类行为或思想与模拟其他生物的机械(如机器狗,机器猫等)。狭义上对机器人的定义还有很多分类法及争议,有些电脑程序甚至也被称为机器人。在当代工业中,机器人指能自动执行任务的人造机器装置,用以取代或协助人类工作。理想中的***真机器人是高级整合控制论、机械电子、计算机与人工智能、材料学和仿生学的产物,目前科学界正在向此方向研究开发。机器人致电连云港建博自动化设备有限公司。机器人有用吗?请您致电连云港建博自动化设备有限公司。辽宁水田机焊接机器人机器人由于所设计的焊接机器人是在准平面、空间狭窄的环境下工作,为了保证机器人能根据电弧传感器的偏差信息,跟...
- 云南塑料机粉碎轴焊接机器人生产线 2024-12-02
- 甘肃割草机焊接机器人厂家 2024-12-02
- 内蒙古轴流风机焊接机器人厂家 2024-12-02
- 河北轴流风机焊接机器人 2024-12-02
- 江苏机械焊接机器人厂家 2024-12-02
- 甘肃搅拌轴焊接机器人设备厂家 2024-12-02
- 河北塑料机粉碎轴焊接机器人自动化 2024-12-02
- 湖南法兰焊接机器人生产线 2024-12-02
- 云南液压缸焊接机器人智能设备 2024-12-02
- 河北压力容器焊接机器人定制设备 2024-12-02


- 甘肃螺杆焊接机器人智能设备 2024-12-02
- 云南粉碎机焊接机器人简易设备 2024-12-02
- 云南提升机焊接机器人定制设备 2024-12-01
- 湖南TMR搅拌轴焊接机器人自动化 2024-12-01
- 江苏压力容器焊接机器人 2024-12-01
- 黑龙江轴流风机焊接机器人设备厂家 2024-12-01




- 河北轴类搅龙焊接机定制设备 12-23
- 盐城螺旋轴搅龙焊接机自动加工 12-23
- 无锡刀轴搅龙焊接机定制设备 12-23
- 天津智能搅龙焊接机机器人 12-23
- 苏州自动搅龙焊接机定制设备 12-23
- 镇江搅龙焊接机批发 12-23
- 吉林搅龙焊接机简易设备 12-23
- 河南智能搅龙焊接机厂家 12-23
- 吉林自动搅龙焊接机自动加工 12-23
- 江苏农机搅龙焊接机厂家 12-23