- 品牌
- hictrl
- 型号
- omv
停车机器人通过激光雷达、摄像头或其他传感技术实现自动导航。这些传感器能够实时收集环境信息,如墙壁、柱子、停车位等。机器人利用自主定位技术,如SLAM(Simultaneous Localization and Mapping),在已有地图的基础上确定自身位置。为了避免碰撞和识别停车位等目标,停车机器人需要具备环境感知能力。激光雷达、摄像头和超声波传感器等设备可以提供实时的环境信息。通过分析传感器数据,机器人可以检测到障碍物并采取相应的避让策略。同时,机器人可以利用摄像头等设备来识别停车位,判断是否可用。停车机器人厂家联系方式?大规模停车机器人现货

停车机器人的优势显而易见。首先,它们能够大幅提高停车效率,缩短停车和取车的时间,为车主们节省宝贵的时间成本。其次,通过优化停车场的布局和停车位的使用,停车机器人能够增加停车数量。。此外,它们还能够减少环境污染,降低车辆存取车期间的能耗和尾气排放,为城市的可持续发展做出贡献。然而,停车机器人的发展也面临着一些挑战。例如,机器人的机械结构复杂,需要高精度的设计和制造,导致成本较高。同时,停车机器人的安全性和可靠性也需要,以确保车辆在停放和取出过程中的安全。此外,停车机器人的普及还需要得到政策法规的支持和推动,以及社会各界的认可和接受。附近哪里有停车机器人功效停车机器人的安全性如何?

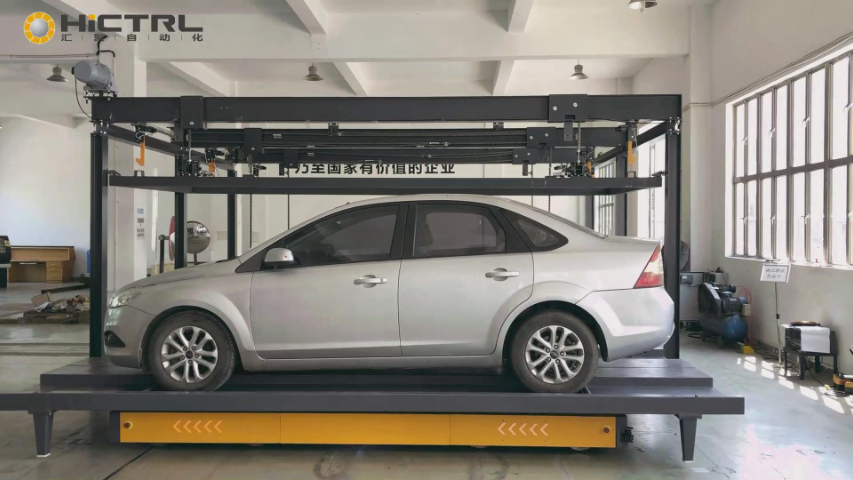
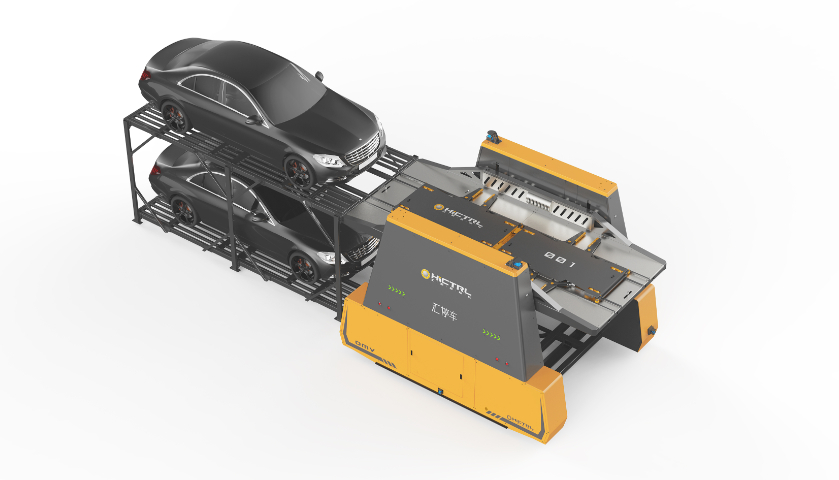
停车机器人是一种自动化设备,旨在解决城市停车难的问题。随着城市化进程的加快,停车难已成为困扰许多城市居民和管理者的一大难题。停车机器人通过先进的技术手段,提供了一种高效、智能的停车解决方案。停车机器人通常采用自动化导引系统(AGV),能够在停车场内自主导航,无需人工干预。它们能够自动识别空闲停车位,并将车辆停放到指定位置。当车主需要取车时,机器人会将车辆从停车位中取出,并送至取车点。总之,停车机器人作为一种新兴的停车解决方案,具有广阔的发展前景。随着技术的不断进步和成本的降低,停车机器人有望在更多城市得到广泛应用,为解决停车难问题提供有力支持。
展望未来,智能停车系统将与智慧城市的其他组成部分深度融合,如智能交通信号系统、公共交通系统等,共同构建一个更加智能、绿色的城市出行环境。随着技术的不断进步和应用的持续深化,智能停车系统有望实现跨区域、跨平台的互联互通,形成乃至全球范围内的停车资源共享网络,让停车不再是出行的烦恼,而是成为享受便捷、舒适出行体验的一部分。总之,智能停车系统作为现代城市交通管理的重要创新,正以其独特的魅力和无限的潜力,城市交通向更加智慧、绿色的方向发展,开启城市交通管理的新纪元。停车机器人一般多少钱?
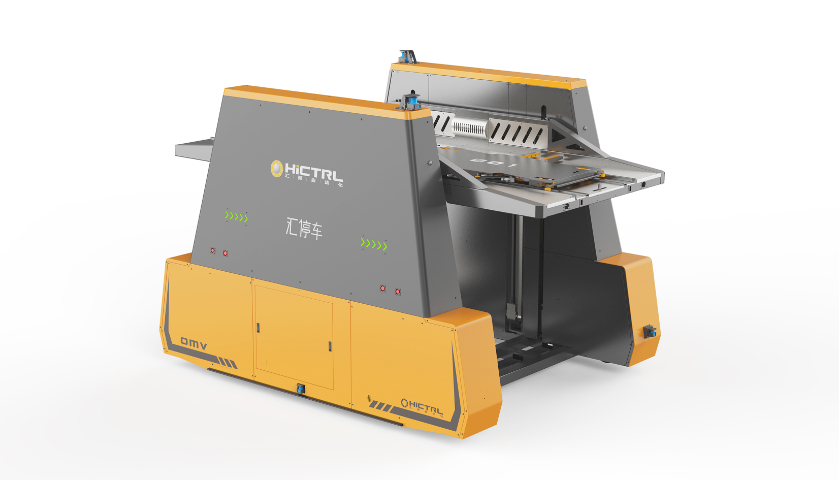
停车机器人的优势提高停车效率:停车机器人可以实现准确的泊车和取车操作,缩短了车主的停车时间。节省空间资源:停车机器人采用立体停车方式,可以充分利用空间资源,增加停车泊位供给。降低管理成本:停车机器人采用自动化管理方式,可以降低停车场的管理成本。提升用户体验:停车机器人提供便捷的停车和取车服务,提升了用户的停车体验。上海汇聚推出的智能停车机器人是一个典型的成功案例。该机器人采用夹持式搬运方式,可以适应不同车型、不同尺寸的车辆。同时,它还配备了自动导航系统、多车自动调度系统和手机APP等智能化功能,实现了全程无人全自动泊车、取车。该机器人在上海、青岛等地的商业停车场和公共停车场中得到了广泛应用,取得了成效。停车机器人的定义与功能。附近哪里有停车机器人功效
停车机器人的用户评价。大规模停车机器人现货
对于停车场管理者而言,智能停车系统同样带来了诸多便利。通过自动化收费、车牌自动识别等功能,不仅提高了工作效率,减少了人力成本,还避免了因人工操作失误造成的经济损失。更重要的是,系统能够收集并分析停车数据,帮助管理者掌握停车需求变化规律,为停车场规划、扩建及服务优化提供科学依据,实现停车场运营效益化。此外,智能停车系统还促进了绿色出行理念的普及。通过与公共交通系统的数据对接,系统能够引导驾驶员在停车后选择公交、地铁等低碳出行方式,减少私家车的使用频率,从而减轻城市交通压力,改善空气质量。同时,部分智能停车场还配备了电动汽车充电桩,为新能源车主提供了极大的便利,促进了新能源汽车产业的发展。大规模停车机器人现货
在智慧园区建设浪潮下,物联网集成停车机器人作为园区静态交通管理的枢纽,实现了停车服务与园区整体智能化系统的深度融合,构建“停车-安防-调度-服务”一体化管理生态。该产品不仅具备高效泊车功能,更集成了物联网、大数据、人工智能等前沿技术,可与园区门禁系统、访客系统、监控系统、能源管理系统无缝对接,实现数据互通与智能联动。产品价值在于构建全场景智慧服务体系:车主进入园区后,通过车牌自动识别即可触发停车预约与路径引导,机器人提前做好接车准备;停车过程中,系统实时监测车库环境、车位状态与车辆安全,同步联动安防监控确保园区安全;取车时,可通过园区APP实现一键取车、无感支付,并联动园区导航系统为车主规划离...
- 低温停车机器人技术指导 2026-01-30
- 国产停车机器人怎么样 2026-01-25
- 便宜的停车机器人优势 2026-01-20
- 销售停车机器人大概价格多少 2026-01-20
- 自动化停车机器人哪个好 2026-01-17
- 新能源停车机器人推荐货源 2026-01-17
- 直销停车机器人标准 2026-01-17
- 整套停车机器人哪个好 2026-01-17
- 整套停车机器人网上价格 2026-01-17
- 小型停车机器人用户体验 2025-12-25

- 一体化停车机器人保养 2025-12-18
- 销售停车机器人系列 2025-12-18
- 哪里有停车机器人网上价格 2025-12-18
- 小型停车机器人电话 2025-12-18
- 哪里有停车机器人变速 2025-12-18
- 绿色环保停车机器人以客为尊 2025-12-18



- 销售麦克纳姆轮服务价格 01-30
- 特种停车机器人批发厂家 01-30
- 常见麦克纳姆轮方案设计 01-30
- 国产储能入柜车定义 01-30
- 靠谱的储能入柜车规格 01-30
- 户外麦克纳姆轮网上价格 01-30
- 自动化储能入柜车技术指导 01-30
- 销售麦克纳姆轮一体化 01-30
- 国产麦克纳姆轮采购信息 01-30
- 特种麦克纳姆轮生产过程 01-30