
- 品牌
- 博手
- 型号
- 齐全
- 类型
- 微耕机,**器,铧式犁,圆盘犁,开沟机,旋耕机,浅松机
- 加工定制
- 是
- 动力类型
- 电动
- 适用领域
- 农业
- 产地
- 江苏
码垛机器人与传统码垛机在许多的使用领域是相同的,一次能搬运一整层箱子。用智能码垛机替代那些损坏了的传统机器。但是传统的机器都是有固定的设备,这些都是能够将货品搬运起来。说:“它还能更换不同的层模板化货盘;这样的话就能够提升工作的效率码垛机器人装配的一些水平横箱设备,能够使得机器在厂房里边很灵活的运转;除此之外,智能码垛机器人功能牢靠,软件的专控比较容易,能够敏捷地转换对进行不同箱子的码垛。以为,在很长的一段时间内,它能够直接将货品抬起来放下这方向发展,在结合其它的技术将效率提高这方面暂时不会是其发展方向。机器人大概多少钱?请您致电连云港建博自动化设备有限公司。山西搅拌机焊接机器人智能设备
机器人
轴焊接机器人是一种高效、精确的自动化设备,广泛应用于各个行业的焊接工艺中。它具有以下几个特点,使其成为市场上备受瞩目的产品。 首先,轴焊接机器人具有高度的灵活性和可编程性。它可以根据不同的焊接需求进行灵活的调整和编程,适应各种复杂的焊接工艺。无论是直线焊接、圆弧焊接还是其他形状的焊接,轴焊接机器人都能够轻松胜任,确保焊接质量和效率。 其次,轴焊接机器人具有高精度和稳定性。它采用先进的传感器和控制系统,能够实时监测焊接过程中的各种参数,并根据需要进行调整,确保焊接的精度和稳定性。无论是对于小型零件的焊接还是大型结构的焊接,轴焊接机器人都能够保证焊接质量的一致性。 此外,轴焊接机器人还具有高效的生产能力和节约成本的优势。它可以实现连续、高速的焊接操作,提高了生产效率。辽宁压力容器焊接机器人设备生产厂家机器人厂家电话,请您致电连云港建博自动化设备有限公司。

目前专门开设机器人专业的高校并不多,毕竟本科属于通识教育,机器人专业有点偏专业细分了但是涉及机器人知识的专业还是蛮多的,很多都会讲解一些基本的机器人知识,如机械工程、自动化等专业,本科可考虑学这些专业,不过机器人基础知识并不多,也可报考其他专业,考虑自学机器人基础知识~考研的话,报考的目标专业就更加了,机械学院、自动化学院、计算机学院等,都有很多老师以机器人为载体开展课题研究,所以考研选择相对宽松一点。同时机器人研究,既有做机器人本体研究的,也有以机器人为载体,研究机器人应用与人工智能算法的。机器人本体研究主要包括:串联/并联机器人本体设计与优化,硬件与软件控制系统、机器人伺服控制等;机器人应用与人工智能研究主要包括:机器人在装配、加工、搬运、码垛等方面的应用,以及结合人工智能开展算法验证与应用实践,如机器人+视觉,机器人+机器学习,机器人+多传感器融合等方面。机器人专业相对宽泛,各个老师的研究内容不尽相同,如工业机器人、水下机器人、服务机器人、康复机器人等~选目标学校的话,可以看一下国内机器人研究较好的学校,
机械手的运动学冗余自由度是指机械手拥有比它的末端所需要的自由度更多的自由度。运动学冗余自由度的机械手具有比非冗余自由度的更好的性能。例如,非冗余自由度的机械手在外部环境中有障碍物时受到非常大的限制,运动学冗余自由度的就能很好的完成任务。由于奇异点的存在,非冗余自由度的机械手的工作空间受到限制,运动学冗余自由度的就能很好的解决这类问题。冗余自由度的机械手在运动控制中能够优化各种性能指标,如:限制关节角度,小化机械手关节角速度、角加速度、关节力矩、能量等。因此,具有运动学冗余自由度的得到了很广的应用,其中躲避障碍物就是一个非常重要的应用。机器人价格是多少?请您致电连云港建博自动化设备有限公司。

机器人外板喷涂作业时,在车身大顶中部两侧机器人同时喷涂作业极有可能发生碰撞,尤其是旋杯与机器人雾化器外部加电的放电针之间,而且还需考虑放电针间的污漆问题,避免因距离过近漆雾凝聚滴落车身造成漆膜品质问题的发生。当两侧机器人同时进入大顶喷涂作业时,可设置喷涂作业等待点或以节拍较长的机器人为先,当该机器人进入大顶防碰撞立方体区时,其他机器人停止喷涂动作并等待,可有效避免碰撞问题的发生。这里需注意一点,喷涂机器人停止喷涂动作时旋杯不得距离车身过近,以防造成吹漆等品质问题。另外,内板喷涂机器人在后背门内板两铰链中间及机盖内板锁孔位置区,通常情况下存在交叉作业问题,建议在交叉作业区前设置喷涂等待点,添加time等待命令,待前一个喷涂完成离开后,再进入立方体区域内完成剩余喷涂作业,否则因为喷涂交叉作业存在避让区,后背门铰链中间和机盖锁钩处极易出现虚喷露底等问题。机器人一般多少钱?请您致电连云港建博自动化设备有限公司。浙江螺杆焊接机器人定制设备
机器人公司有哪些?请您致电连云港建博自动化设备有限公司。山西搅拌机焊接机器人智能设备
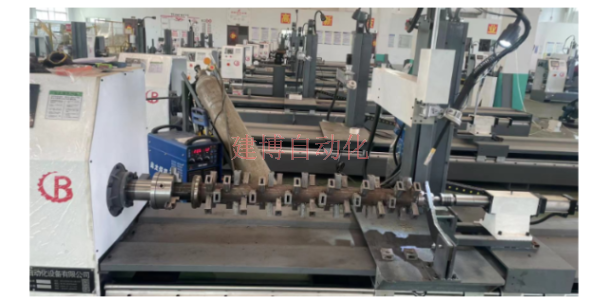
由于所设计的焊接机器人是在准平面、空间狭窄的环境下工作,为了保证机器人能根据电弧传感器的偏差信息,跟踪焊缝自动焊接,要求所设计的机器人应该结构紧凑、移动灵活且工作稳定.文中针对狭窄空间特点,开发了一种小型移动焊接机器人,根据机器人各结构的运动特点,运用模块化设计方法,把机器人机构分为轮式移动平台、焊炬调节机构和电弧传感器三部分。其中,轮式移动平台由于其惯性大,响应慢,主要对焊缝进行粗跟踪,焊炬调节机构负责焊缝精确跟踪,电弧传感器完成焊缝偏差实时识别.另外,机器人控制器和电机驱动器集成安装于机器人移动平台上,使其体积更小。同时,为了减少恶劣焊接环境下粉尘对运动部件影响,采用全封闭式结构,提高其系统可靠性[2山西搅拌机焊接机器人智能设备

机器人是自动控制机器的俗称,自动控制机器包括一切模拟人类行为或思想与模拟其他生物的机械(如机器狗,机器猫等)。狭义上对机器人的定义还有很多分类法及争议,有些电脑程序甚至也被称为机器人。在当代工业中,机器人指能自动执行任务的人造机器装置,用以取代或协助人类工作。理想中的***真机器人是高级整合控制论、机械电子、计算机与人工智能、材料学和仿生学的产物,目前科学界正在向此方向研究开发。机器人致电连云港建博自动化设备有限公司。机器人有用吗?请您致电连云港建博自动化设备有限公司。辽宁水田机焊接机器人机器人由于所设计的焊接机器人是在准平面、空间狭窄的环境下工作,为了保证机器人能根据电弧传感器的偏差信息,跟...
- 云南塑料机粉碎轴焊接机器人生产线 2024-12-02
- 甘肃割草机焊接机器人厂家 2024-12-02
- 内蒙古轴流风机焊接机器人厂家 2024-12-02
- 河北轴流风机焊接机器人 2024-12-02
- 江苏机械焊接机器人厂家 2024-12-02
- 甘肃搅拌轴焊接机器人设备厂家 2024-12-02
- 河北塑料机粉碎轴焊接机器人自动化 2024-12-02
- 湖南法兰焊接机器人生产线 2024-12-02
- 云南液压缸焊接机器人智能设备 2024-12-02
- 河北压力容器焊接机器人定制设备 2024-12-02

- 甘肃螺杆焊接机器人智能设备 2024-12-02
- 云南粉碎机焊接机器人简易设备 2024-12-02
- 云南提升机焊接机器人定制设备 2024-12-01
- 湖南TMR搅拌轴焊接机器人自动化 2024-12-01
- 江苏压力容器焊接机器人 2024-12-01
- 黑龙江轴流风机焊接机器人设备厂家 2024-12-01




- 河北轴类搅龙焊接机定制设备 12-23
- 盐城螺旋轴搅龙焊接机自动加工 12-23
- 无锡刀轴搅龙焊接机定制设备 12-23
- 天津智能搅龙焊接机机器人 12-23
- 苏州自动搅龙焊接机定制设备 12-23
- 镇江搅龙焊接机批发 12-23
- 吉林搅龙焊接机简易设备 12-23
- 河南智能搅龙焊接机厂家 12-23
- 吉林自动搅龙焊接机自动加工 12-23
- 江苏农机搅龙焊接机厂家 12-23