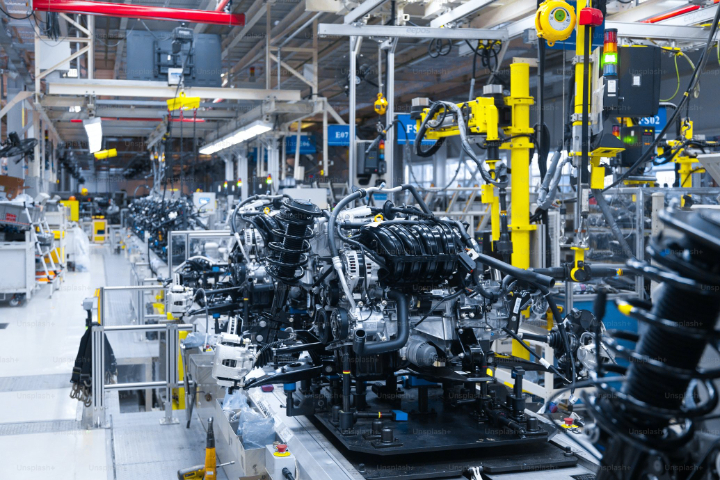
焊接机器人的高精度焊接接头质量控制:未来,焊接机器人将采用更先进的高精度焊接接头质量控制技术。它们能够实时监测焊接接头的质量,包括焊缝的宽度、高度、表面粗糙度等关键指标。一旦发现质量问题,机器人将立即采取措施进行调整和改进,确保焊接接头的质量和安全性。焊接机器人的智能焊接参数优化算法:焊接机器人将配备更智能的焊接参数优化算法。这些算法能够根据实际焊接过程中的数据反馈,自动调整焊接参数以适应不同的工件材质和焊接要求。同时,它们还能够考虑能源消耗、材料浪费等因素,实现更加环保、高效的焊接过程。焊接机器人作业,精确度高,展现非凡焊接实力。重庆新松机器人服务商

便携焊接机器人的智能识别功能便携焊接机器人具备智能识别功能,能够自动识别工件的类型、尺寸和位置等信息。它们通过先进的传感器和控制系统,能够实现对工件的精确识别和定位。这种智能识别功能不仅能够提高焊接质量和效率,还能够减少人工干预和误差。同时,便携焊接机器人还能够根据工件的实际情况进行自动调整和优化,以确保焊接过程的稳定性和可靠性。便携焊接机器人的高精度定位系统便携焊接机器人采用高精度定位系统,能够实现对工件的精确定位和跟踪。它们通过先进的传感器和算法,能够实时了解工件的位置和状态信息,并根据这些信息对焊接过程进行精确控制和优化。这种高精度定位系统不仅能够提高焊接质量和效率,还能够减少焊接过程中的误差和缺陷。同时,便携焊接机器人还能够适应各种复杂和多变的工作环境,确保焊接过程的安全性和可靠性。成都免示教机器人制造商焊接协作机器人可与MES、ERP等企业管理系统无缝集成,实现生产数据的实时采集和分析。
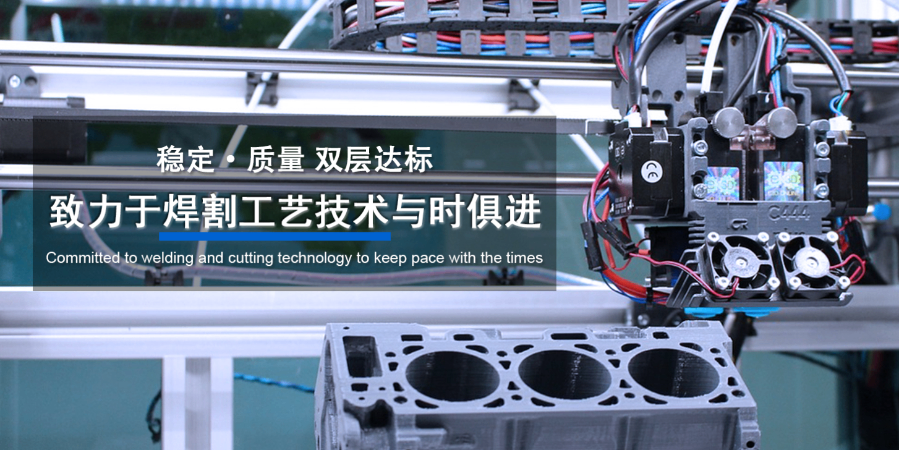
焊接机器人的高精度轨迹跟踪:焊接机器人的高精度轨迹跟踪能力是其性能***的关键因素之一。它们能够实时感知焊接过程中的各种变化,并根据这些变化调整自己的运动轨迹。这种高精度轨迹跟踪能力不仅提高了焊接精度和稳定性,还使得机器人能够在复杂的工作环境中保持高效、安全的运行。焊接机器人的多轴联动技术:焊接机器人采用多轴联动技术,能够实现更加复杂和多样化的焊接操作。它们能够同时控制多个关节的运动,使得焊枪能够按照预定的轨迹进行精确移动。这种多轴联动技术不仅提高了焊接效率和质量,还使得机器人能够应对更加复杂和多变的焊接任务。
焊接机器人的自主导航与避障技术:未来,焊接机器人将配备更先进的自主导航与避障技术。它们能够利用高精度传感器和先进的算法,在复杂的工作环境中自主导航,避开障碍物,确保焊接任务的顺利进行。这种自主导航与避障技术将**提高焊接机器人的适应性和灵活性,使其能够在更多样化的应用场景中发挥出色表现。焊接机器人的智能焊接材料识别:随着机器视觉技术的不断进步,焊接机器人将具备智能焊接材料识别的能力。它们能够通过摄像头捕捉工件表面的图像,利用深度学习算法对材料进行分类和识别,从而选择合适的焊接参数和工艺。这种智能焊接材料识别技术将减少人为干预,提高焊接质量和效率。新型焊接机器人,小巧便携设计,让焊接工作更灵活且便捷。

焊接机器人的高精度焊接变形补偿技术:未来,焊接机器人将采用高精度焊接变形补偿技术。该技术能够实时监测焊接过程中的变形情况,并采取相应的措施进行补偿。这将**提高焊接件的尺寸精度和形状稳定性,满足更高要求的焊接任务。焊接机器人的智能焊接参数自适应调整系统:焊接机器人将实现更加智能的焊接参数自适应调整系统。该系统能够根据实际焊接过程中的数据反馈,自动调整焊接参数以适应不同的工件材质和焊接要求。同时,它还能够考虑能源消耗、材料浪费等因素,实现更加环保、高效的焊接过程。焊接协作机器人通过实时调整焊接速度和电流,确保焊缝均匀美观,提升产品竞争力。智能焊接机器人制造商
该机器人内置丰富的焊接工艺库,方便用户快速调用适合的焊接参数,提高生产效率。重庆新松机器人服务商
便携焊接机器人的安全防护措施便携焊接机器人在设计和制造过程中,非常注重安全防护措施。它们采用多重安全保护机制,如紧急停止按钮、过热保护、短路保护等,以确保在焊接过程中不会对人员和设备造成伤害。此外,便携焊接机器人还具备故障诊断和预警功能,能够在出现故障时及时停机并发出警报,避免事故的发生。这些安全防护措施使得便携焊接机器人在各种作业环境中都能够安全可靠地运行。便携焊接机器人的环保优势便携焊接机器人相比传统焊接方式,具有***的环保优势。它们采用先进的焊接技术和控制系统,能够实现对焊接过程的精确控制和优化,减少焊接过程中产生的烟尘和有害气体排放。同时,便携焊接机器人还能够通过编程和远程控制,实现自动化作业,减少人工干预和能源消耗。这些环保优势使得便携焊接机器人在现代工业制造中更加受到青睐。重庆新松机器人服务商