黑盒模组:提供封装好的功能,使用者无需了解内部细节,直接调用接口即可使用;白盒模组:提供相对透明的实现细节,允许使用者根据需求进行定制和扩展;灰盒模组:介于黑盒和白盒之间,既提供一定的封装,也允许使用者进行一定程度的定制。模组运行机制模组运行机制是指模组如何处理输入数据并产生输出结果的过程。以下是一个典型模组的运行机制:接收输入数据:模组通过接口接收外部输入的数据,可以是实时数据也可以是批量数据。数据预处理:对输入数据进行必要的预处理,包括数据清洗、标准化、特征提取等操作,以提高数据质量。半密丝杆模组到这里!吴江区精密手动模组

模组在AI领域中的应用具有重要的实际意义。通过对模组的合理设计和优化,可以提高AI系统的可维护性、可扩展性和性能。随着AI技术的不断发展,模组化设计将在未来的人工智能研究和应用中发挥更加重要的作用。因此,我们应该重视模组在AI学习中的重要性,不断推进模组的研发和应用。模组在现代制造业中扮演着重要的角色,其优点主要包括以下几个方面:提升生产效率:模组化的生产方式使得生产流程更加标准化,降低了生产复杂性,提高了生产效率。这不仅降低了生产成本,也缩短了产品上市时间。降低成本:模组的设计和制造可以批量进行,实现了规模经济,从而降低了每个模组的成本。此外,模组化还可以简化生产过程,减少人力和物力的消耗。
吴江区精密手动模组KK模组与皮带模组的不同。

工具安装到机器人上。利用软件自带的建模功能创建工件模型,然后在“基础”菜单栏下,左侧的“布局”浏览树中将工件拖拽到变位机上,这样工件就被安装到变位机上,调整工件的位置与姿态,全部调整完成后工作站的效果如下图所示。设备布局完成后,使用“从布局”方式创建机器人系统,在系统创建向导对话框的“选择系统的机械装置”步骤中将机器人与变位机同时勾选,其他步骤可按需求自定义选择。变位机手动运行操作在机器人虚拟示教器中将控制的机械装置单元切换为变位机,默认情况下机器人系统中添加的***个变位机机械装置单元名称为STN1,然后通过摇杆左右向摇动就可以控制变位机进行反转或正转运行。***变位机机械装置单元如果要使用机器人程序控制变位机自动运行,那么就需要***变位机机械装置单元,这样在对机器人示教编程时才能够同时记录下变位机的关节运动数据。RobotStudio软件“仿真”菜单栏下,在“配置”功能卡中点击“***机械装置单元”命令按钮,在弹出的当前机械单元对话框中将变位机机械装置单元“STN1”勾选。这样,变位机机械装置单元就被***了。编写变位机自动运行程序变位机自动运行也是通过编写机器人例行程序实现的,与行走轴一样。
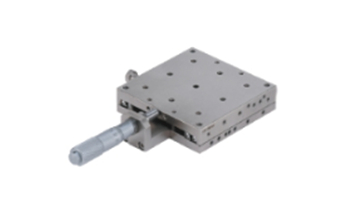
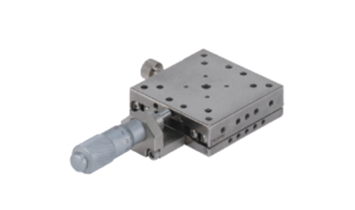
直线模组又称线性模组、直角坐标机器人、直线滑台等,随着直线导轨、直线运动模组、滚珠丝杆直线传动机构的自动升级单元。通过各单元的组合,可以实现负载的直线和曲线运动,使轻载自动化更加灵活,定位更加准确。目前使用的直线模组可分为两种类型:同步带式和滚珠丝杆式。1、同步带式直线模组主要由:皮带、直线导轨、铝合金型材、联轴器、电机、光电开关等组成。2、滚珠丝杆式直线模组主要由:滚珠丝杆、直线导轨、铝合金型材、滚珠丝杆支撑座、联轴器、电机、光电开关等组成。同步带类型直线模组:同步带直线模组的工作原理如下:将皮带安装在直线模组的两侧的传动轴上,作为动力输入轴,并在皮带上固定一个滑块,增加设备的工件。当输入时,滑块通过驱动皮带移动,一般来说同步带直线模组是专门设计在一边控制皮带运动的松紧度,方便生产过程中设备的调试。同步带直线模组可根据不同的负载要求,通过增加导轨来增加直线模组的刚度。不同的规格的直线模组,不同的负载限制。同步带直线模组的精度取决于同步带的质量和组合的加工过程,功率输入的控制也对精度有着影响。螺杆模组与皮带模组的区别?

直线模组的发展是机械工程领域不断追求创新和进步的一个缩影。早期的直线模组主要依赖于传统的机械结构,如滚珠丝杠和滑动导轨,虽然能够实现直线运动,但在精度、速度和负载能力方面存在一定的限制。随着技术的不断进步,直线模组逐渐引入了电磁驱动、直线电机等。直线电机驱动的直线模组具有无接触、无磨损的特点,提高了运动的速度和精度,同时减少了维护成本。在材料科学的支持下,新型的复合材料和涂层被应用于直线模组的制造中,提高了其耐磨、耐腐蚀和耐高温性能。不仅如此,直线模组的设计也越来越注重人性化和环保。在满足功能需求的前提下,减小了体积和重量,降低了能源消耗,符合可持续发展的要求。未来,直线模组有望在更多领域实现突破,为人类创造更多的价值。全密皮带模组到这里。四川模组制造厂家
全密皮带模组哪里买?吴江区精密手动模组
在这里小编来分享一下工业机器人的应用及轴数分类。一、单轴、二轴、三轴线性机器人线性机器人也称为直角坐标机械手,通过直线运动可以组合成XY十字式,XYZ悬臂式或者龙门式,在其滑块上安装各行业所需工件配合电机及设定一套合适的程序,即可实现让工件自动循环直线运动的工作,是**简单实用的工业机器人。二、四轴机器人四轴机器人的前两个关节可以在水平面上左右自由旋转,第三个关节由一个称为羽毛的金属杆和夹持器组成。该金属杆可以在垂直平面内向上和向下移动或者围绕其垂直轴旋转,但不能倾斜。这种独特的设计使四轴机器人具有很强的刚性,从而使它们能够胜任高速的高重复性的工作。三、五轴机器人可以通过X、Y、Z三个空间轴进行转动,同时可以依靠基座上的轴实现转身的动作,以及手部可以灵活转动的轴,增加了其灵活性。四、六轴机器人六轴工业机器人是市面上应用比较多的一种机器人,与五轴机器人的**大区别就是多了一个可以自由转动的轴。***个关节能在水平面自由旋转,后面两关节能在垂直平面移动。此外,六轴机器人有一个手臂,两个腕关节,这让它具有人类的手臂和手腕类似的能力。可以拿起水平面任意朝向的部件,以特殊的角度放入包装产品里。吴江区精密手动模组