
相关滤波的跟踪算法始于2012年P.Martins提出的CSK方法,作者提出了一种基于循环矩阵的核跟踪方法,并且从数学上完美解决了密集采样(Dense Sampling)的问题,利用傅立叶变换快速实现了检测的过程。在训练分类器时,一般认为离目标位置较近的是正样本,而离目标较远的认为是负样本。回顾前面...
目标跟踪基本参数
- 品牌
- 慧视科技
- 型号
- 可咨询
- 输出信号
- 数字型,定制
- 制作工艺
- 集成,薄膜,陶瓷,可定制
- 材质
- 可定制
- 材料物理性质
- 导体,磁性材料,定制
- 材料晶体结构
- 定制
- 加工定制
- 是
目标跟踪企业商机
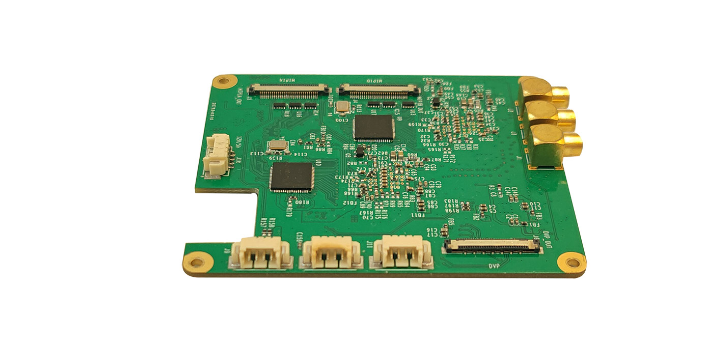
目标跟踪是计算机视觉研究领域的热点之一,并得到广泛应用。相机的跟踪对焦、无人机的自动目标跟踪等都需要用到了目标跟踪技术。另外还有特定物体的跟踪,比如人体跟踪,交通监控系统中的车辆跟踪,人脸跟踪和智能交互系统中的手势跟踪等。简单来说,目标跟踪就是在连续的视频序列中,建立所要跟踪物体的位置关系,得到物体完整的运动轨迹。给定图像首帧的目标坐标位置,计算在下一帧图像中目标的确切位置。在运动的过程中,目标可能会呈现一些图像上的变化,比如姿态或形状的变化、尺度的变化、背景遮挡或光线亮度的变化等。目标跟踪算法的研究也围绕着解决这些变化和具体的应用展开。RV1126图像处理板的目标识别能力突出。陕西目标跟踪参考价格
目标跟踪
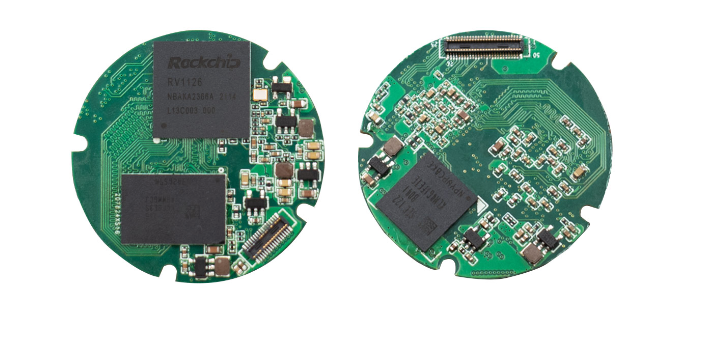
视觉目标跟踪是指在视频图像序列的各帧图像中找到被跟踪的目标。基于区域的跟踪的基本思想是通过图像分割或预先人为确定,提取包含着运动目标的运动变化的区域范围作为匹配的目标模板,然后把目标模板与实时图像在所有可能位置上进行叠加,然后计算某种图像相似性度量的相应值,其比较大相似性相对应的位置就是目标的位置,Jorge等人提出的区域跟踪算法不仅利用了分割结果来给跟踪提供信息,同时也能利用跟踪所提供的信息改善分割效果,把连续帧的目标匹配起来跟踪目标。数据目标跟踪功能慧视RK3399PRO图像跟踪板支持目标跟踪识别目标(人、车)。

视频自动跟踪系统,一般都是用在露天的、较大地域范围的监控系统中,且边跟踪边录像。在自动跟踪系统的发展上,jun用上的视频自动跟踪、毫米波雷达跟踪以及激光雷达跟踪等是比较成熟的;非jun用领域,存在一些固定画面、摄像机从不运动的的目标检测与跟踪系统;基于带红外线的、常用在演播室或者会议室的、很近距离的跟踪系统,目前主要局限于简单背景(如室内环境下)、大目标(即目标在视频图像中占较大区域),而且一般无法实现控制摄像机转动来对目标进行跟踪。
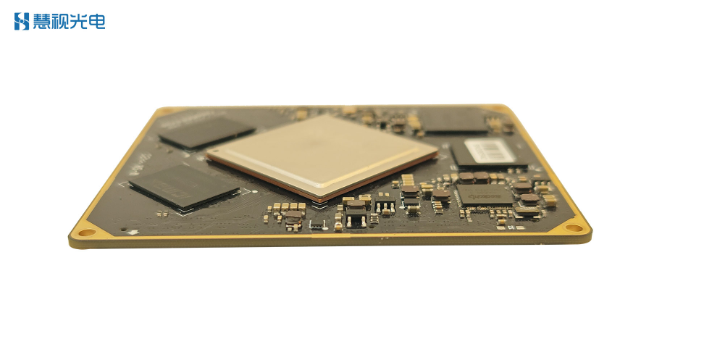
通常,遮挡可以分为三种情况:目标间遮挡、背景遮挡、自遮挡。对于目标之间的相互遮挡,可以选择根据目标的位置和目标特征的先验知识来处理这一问题。而对于场景结构的导致的部分遮挡此方法则难以判断,因为难以辨认究竟是目标形状发生变化还是发生遮挡。所以,处理遮挡问题的通用方法是用线性或非线性动态建模方法对运动目标进行,并在目标发生遮挡时,预测目标的可能位置,一直到目标重新出现时再修正它的位置。可以用卡尔曼滤波器来实现估计目标的位置,也可以用粒子滤波对目标做状态估计。成都慧视的RK3588跟踪板卡很可以。

检测器的输出通常被用作跟踪设备的输入,跟踪设备的输出被提供给运动预测算法,该算法预测物体在接下来的几秒钟内将移动到哪里。然而,在无检测跟踪中,情况并非如此。基于DFT的模型要求必须在首帧中手动初始化固定数量的对象,然后必须在随后的帧中对这些对象进行定位。DFT是一项困难的任务,因为关于要跟踪的对象的信息有限,而且这些信息不清楚。结果,初始边界框与背景中的感兴趣对象近似,并且对象的外观可能随着时间的推移而急剧改变。
慧视RV1126图像跟踪板支持目标跟踪识别目标(人、车)。视频目标跟踪诚信推荐用于安防监控及状态监测的摄像头数量的飞速发展。陕西目标跟踪参考价格
之所以能产生这种可见运动或表观运动,是因为物体以不同的速度在不同的方向上移动,或者是因为相机在移动(或者两者都有)在很多应用程序中,跟踪表观运动都是极其重要的。它可用来追踪运动中的物体,以测定它们的速度、判断它们的目的地。对于手持摄像机拍摄的视频,可以用这种方法消除抖动或减小抖动幅度,使视频更加平稳。运动估值还可用于视频编码,用以压缩视频,便于传输和存储。被跟踪的运动可以是稀疏的(图像的少数位置上有运动,称为稀疏运动),也可以是稠密的(图像的每个像素都有运动,称为稠密运动)跟踪视频中的特征点从前面章节介绍的内容可以看出,根据特殊的点分析图像,可以使计算机视觉算法更加实高效。陕西目标跟踪参考价格
与目标跟踪相关的文章

自主可控目标跟踪诚信推荐
- 高性能目标跟踪工程 2024-10-22
- 辽宁无源目标跟踪 2024-10-22
- 稳定目标跟踪性价比 2024-10-22
- 智能化目标跟踪联系方式 2024-10-22
- 附近目标跟踪技术 2024-10-22
- 低压线目标跟踪好选择 2024-10-22
- 广东网络目标跟踪 2024-10-22
- 福建目标跟踪性价比 2024-10-21
- 广西移动目标跟踪 2024-10-21
- 河南目标跟踪服务电话 2024-10-21
- 黑龙江目标跟踪功效 2024-10-21
- 湖北安全目标跟踪 2024-10-21
与目标跟踪相关的产品



与目标跟踪相关的新闻
-
宁夏目标跟踪价格信息 2024-10-21 14:03:05设想这样一个场景:孙悟空在飞行过程中完成了一次变化(这里假设他变成了一只鸟),但这个变化并不是像西游记拍摄中有烟雾效果完成的,而就是通过身体结构发生渐变来完成的,这种情况下,检测器应该会在后续的检测任务中失败,因为设计好的检测器只是为了检测目标孙悟空的存在,孙悟空变身之后已经不存在这个目标,检测器是...
-
比较好的目标跟踪优势 2024-10-20 10:03:23然后在下一帧采集的图像中对目标对象进行特征提取;特征匹配的过程既是将提取出来的目标对象的特征与我们事先已经建立的特征模板进行匹配,通过与特征模板的相似程度来确定被跟踪的目标对象,实现对目标的跟踪。基于特征的跟踪算法的优点在于速度快、对运动目标的尺度、形变和亮度等变化不敏感,能满足特定场合的处理要求。...
-
辽宁哪里有目标跟踪 2024-10-20 23:03:09如今,无人机在我们生活中的应用越来越广。例如无人机巡检安防领域,无人机能够到达人无法触及的一些角度,能够很大程度上扩大安防检查的覆盖面。在工地、电力、化工等行业,晚上巡检是必不可少的环节,并且晚上巡检还能发现白天无法看到的一些问题,在白天,一般的相机效果很好,能够看到非常清晰的监控画面,但是到了晚上...
-
新疆目标跟踪要多少钱 2024-10-20 01:03:20目标跟踪是在首帧中给定待跟踪目标的情况下,对目标进行特征提取,对感兴趣区域进行分析;然后在后续图像中找到相似的特征和感兴趣区域,并对目标在下一帧中的位置进行预测。作为计算机视觉领域的一个热点研究方向,目标跟踪一直都是一项具有挑战性的工作。目标跟踪技术在导弹制导、智能监控系统、视频检索、无人驾驶、人机...
与目标跟踪相关的问题
新闻资讯
产品推荐
-
广西如何目标识别控制软件
2024-10-25 -
安徽目标识别定制
2024-10-25 -
上海国产化目标识别开发
2024-10-25 -

海南低压线目标识别型号
2024-10-25 -

窄带多路高清视频压缩与传输森林
2024-10-25 -
贵州安全目标识别办公软件
2024-10-25 -
青海安全目标识别自主可控
2024-10-25 -
四川国产化目标识别供应商
2024-10-25 -
浙江目标识别型号
2024-10-25