
相关滤波的跟踪算法始于2012年P.Martins提出的CSK方法,作者提出了一种基于循环矩阵的核跟踪方法,并且从数学上完美解决了密集采样(Dense Sampling)的问题,利用傅立叶变换快速实现了检测的过程。在训练分类器时,一般认为离目标位置较近的是正样本,而离目标较远的认为是负样本。回顾前面...
目标跟踪基本参数
- 品牌
- 慧视科技
- 型号
- 可咨询
- 输出信号
- 数字型,定制
- 制作工艺
- 集成,薄膜,陶瓷,可定制
- 材质
- 可定制
- 材料物理性质
- 导体,磁性材料,定制
- 材料晶体结构
- 定制
- 加工定制
- 是
目标跟踪企业商机
视频自动跟踪系统,一般都是用在露天的、较大地域范围的监控系统中,且边跟踪边录像。在自动跟踪系统的发展上,jun用上的视频自动跟踪、毫米波雷达跟踪以及激光雷达跟踪等是比较成熟的;非jun用领域,存在一些固定画面、摄像机从不运动的的目标检测与跟踪系统;基于带红外线的、常用在演播室或者会议室的、很近距离的跟踪系统,目前主要局限于简单背景(如室内环境下)、大目标(即目标在视频图像中占较大区域),而且一般无法实现控制摄像机转动来对目标进行跟踪。目标跟踪的板卡哪家做的好呀?高性能目标跟踪型号
目标跟踪
设想这样一个场景:孙悟空在飞行过程中完成了一次变化(这里假设他变成了一只鸟),但这个变化并不是像西游记拍摄中有烟雾效果完成的,而就是通过身体结构发生渐变来完成的,这种情况下,检测器应该会在后续的检测任务中失败,因为设计好的检测器只是为了检测目标孙悟空的存在,孙悟空变身之后已经不存在这个目标,检测器是不会有火眼金睛继续检测到变化后的孙悟空的。但是,对于跟踪设备就不一样了,跟踪目标,哪怕目标在跟踪过程中发生了巨大变化,这些都是跟踪设备的本质能力。理想的跟踪设备应该可以很好的跟上孙悟空渐变的整个过程,并且可以继续后面变身之后对鸟的跟踪。辽宁数据目标跟踪工程师以RK3399核心板为基础进行定制开发,让摄像头更加智能高效,能够输出高清流的图像视频。

目标跟踪算法具有不同的分类标准,可根据检测图像序列的性质分为可见光图像跟踪和红外图像跟踪;又可根据运动场景对象分为静止背景目标跟踪和运动背景下的目标跟踪。由于基于区域的目标跟踪算法用的是目标的全局信息,比如灰度、色彩、纹理等。因此当目标未被遮挡时,跟踪精度非常高、跟踪非常稳定,对于跟踪小目标效果很好,可信度高。但是在灰度级的图像上进行匹配和全图搜索,计算量较大,非常费时间,所以在实际应用中实用性不强;其次,算法要求目标不能有太大的遮挡及其形变,否则会导致匹配精度下降,造成运动目标的丢失。
在周界安防领域,传统的摄像头有画无声并不具备报警功能。慧视AI图像处理板能够赋能监控进行AI识别,当出现可疑人物有翻越等入侵行为时,监控能够立即锁定跟踪目标人物,并向安保室发出警报,安保室人员能够通过监控的AI跟踪锁定找到可疑人员的移动轨迹,便于纠察。此外,针对于夜间监控的不足,慧视双光吊舱识别装置能够实现昼夜成像,白天通过可见光实现区域的监控画面,在夜晚通过红外实现道路或者目标区域的画面成像,使得一些光线较差的区域也能实现清晰成像,避免被可疑人员钻空。这样就能在小区出入口、室外路口、周界、园区活动空间、地下室以及高空抛物防控等重要区域,通过智能监控联动,实现小区全天候、24小时可视化报警监控。通过及时预警通知,规避安全风险,实现小区的安全管理。无人机吊舱能够通过定制算法和精细定位技术实现农药精细喷洒、农作物精细抛粮等操作。

目标检测与目标跟踪这两个任务有着密切的联系。针对目标跟踪任务,微软亚洲研究院提出了一种通过目标检测技术来解决的新视角,采用简洁、统一而高效的“目标检测+小样本学习”框架,在多个主流数据集上均取得了杰出性能。目标跟踪(Object tracking)与目标检测(Object detection)是计算机视觉中两个经典的基础任务。跟踪任务需要由用户指定跟踪目标,然后在视频的每一帧中给出该目标所在的位置,通常由一系列的矩形边界框表示。而检测任务旨在定位图片中某几类物体的坐标位置。对物体的检测、识别和跟踪能够有效地帮助机器理解图片视频的内容,为后续的进一步分析打下基础。AI图像处理板能实现24小时、无间隙信息化监控。新疆目标跟踪批发商
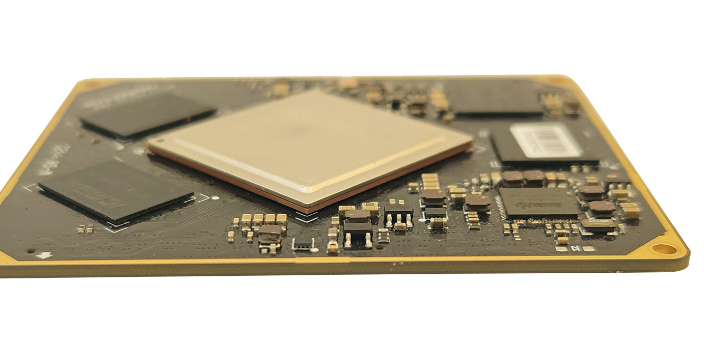
工程师以RK3588核心板为基础进行定制开发,让摄像头更加智能高效,能够输出高清流的图像视频。高性能目标跟踪型号
基于特征匹配的跟踪方法不考虑运动目标的整体特征,通过有目的的提取序列图像中的过零点、边缘轮廓、线段等相关特征或是部分特性,并建立匹配模板,对目标对象进行特征匹配,达到对目标对象跟踪的目的。假定运动目标可以由惟一的特征**表达,搜索到该相应的特征就认为跟踪上了运动目标。除了用单一的特征来实现跟踪外,还可以采用多个特征信息融合在一起作为跟踪特征。该算法主要包括特征提取和特征匹配两个方面。其中,特征提取指的是针对所包含的目标对象的序列图像选择合适的目标跟踪特性。高性能目标跟踪型号
与目标跟踪相关的文章

自主可控目标跟踪诚信推荐
- 高性能目标跟踪工程 2024-10-22
- 辽宁无源目标跟踪 2024-10-22
- 稳定目标跟踪性价比 2024-10-22
- 智能化目标跟踪联系方式 2024-10-22
- 附近目标跟踪技术 2024-10-22
- 低压线目标跟踪好选择 2024-10-22
- 广东网络目标跟踪 2024-10-22
- 福建目标跟踪性价比 2024-10-21
- 广西移动目标跟踪 2024-10-21
- 河南目标跟踪服务电话 2024-10-21
- 黑龙江目标跟踪功效 2024-10-21
- 湖北安全目标跟踪 2024-10-21
与目标跟踪相关的产品




与目标跟踪相关的新闻
-
宁夏目标跟踪价格信息 2024-10-21 14:03:05设想这样一个场景:孙悟空在飞行过程中完成了一次变化(这里假设他变成了一只鸟),但这个变化并不是像西游记拍摄中有烟雾效果完成的,而就是通过身体结构发生渐变来完成的,这种情况下,检测器应该会在后续的检测任务中失败,因为设计好的检测器只是为了检测目标孙悟空的存在,孙悟空变身之后已经不存在这个目标,检测器是...
-
比较好的目标跟踪优势 2024-10-20 10:03:23然后在下一帧采集的图像中对目标对象进行特征提取;特征匹配的过程既是将提取出来的目标对象的特征与我们事先已经建立的特征模板进行匹配,通过与特征模板的相似程度来确定被跟踪的目标对象,实现对目标的跟踪。基于特征的跟踪算法的优点在于速度快、对运动目标的尺度、形变和亮度等变化不敏感,能满足特定场合的处理要求。...
-
辽宁哪里有目标跟踪 2024-10-20 23:03:09如今,无人机在我们生活中的应用越来越广。例如无人机巡检安防领域,无人机能够到达人无法触及的一些角度,能够很大程度上扩大安防检查的覆盖面。在工地、电力、化工等行业,晚上巡检是必不可少的环节,并且晚上巡检还能发现白天无法看到的一些问题,在白天,一般的相机效果很好,能够看到非常清晰的监控画面,但是到了晚上...
-
新疆目标跟踪要多少钱 2024-10-20 01:03:20目标跟踪是在首帧中给定待跟踪目标的情况下,对目标进行特征提取,对感兴趣区域进行分析;然后在后续图像中找到相似的特征和感兴趣区域,并对目标在下一帧中的位置进行预测。作为计算机视觉领域的一个热点研究方向,目标跟踪一直都是一项具有挑战性的工作。目标跟踪技术在导弹制导、智能监控系统、视频检索、无人驾驶、人机...
与目标跟踪相关的问题
新闻资讯
产品推荐
-
四川低压线目标识别软件
2024-10-25 -
河北专业视频压缩与传输交互系统
2024-10-25 -
湖南省时省力目标识别定制
2024-10-25 -
广西如何目标识别控制软件
2024-10-25 -
安徽目标识别定制
2024-10-25 -
上海国产化目标识别开发
2024-10-25 -

海南低压线目标识别型号
2024-10-25 -

窄带多路高清视频压缩与传输森林
2024-10-25 -
贵州安全目标识别办公软件
2024-10-25