直线模组的负载能力决定了其能够承受的比较大重量和外力。负载能力主要取决于模组的结构设计、传动部件的强度以及导轨的承载能力。滚珠丝杠直线模组由于丝杠的刚性较高,通常能够承受较大的负载,但负载过大会导致丝杠的磨损加剧和寿命缩短。同步带直线模组的负载能力相对较低,但其优势在于速度快、成本低,适用于负载较轻的应用场景。在选择直线模组时,必须根据实际负载需求进行合理选型。如果负载超过模组的额定承载能力,可能会导致模组运行不稳定、精度下降甚至损坏。半密丝杆模组到哪里买?台达模组咨询

选择合适的直线模组对于确保系统性能和可靠性至关重要。首先,要根据应用需求确定所需的行程长度。行程过短可能无法满足工作范围要求,过长则可能增加成本和空间占用。精度和重复定位精度应根据具体的工作要求进行选择,高精度的应用需要选择滚珠丝杠或直线电机直线模组。负载能力要与实际负载相匹配,同时考虑负载的分布和动态特性。速度和加速度要根据工作节拍和运动要求来确定。此外,还需考虑工作环境的温度、湿度、防尘要求等因素,以及模组的安装方式、维护便利性和成本等。综合考虑这些因素,才能选择到适合的直线模组,实现比较好的性能和经济效益。toyo模组哪里好高精度皮带模组看哪家?

工业自动化滑台是指在自动化工业领域中对能够实现直线运动的装置的统称,也称为直线定位模组。直线模组有几种叫法,线性模组、直角坐标机器人、直线滑台等,是继直线导轨、滚珠丝杆直线传动机构的自动化升级单元。可以通过各个单元的组合实现负载的直线、曲线运动,是轻负载的自动化更加灵活、定位更加明确。真线模组市场定位在光伏设备,上下料机械手、越移设备、涂胶设备、贴片设备等,这种机械手熊给这个行业的设备带来便利的点有:单体运动速度快、重复定位精度高、本体质量轻、占设备空间小、寿命长。直线模组运用的范围一直在扩大,深受设备制造商的青睐。直线模组当前已普遍运用于测量、激光焊接、激光切割、涂胶机、喷涂机、打孔机、点胶机、小型数控机床、雕铣机、样本绘图机、裁床、移载机、分类机、试验机及适用教育等场所。
四轴机器人,可以沿着x,y,z轴进行转动,与三轴机器人不同的是,它具有一个**运动的第四轴,一般来说SCARA机器人就可以被认为是四轴机器人。五轴是许多工业机器人的配置,这些机器人可以通过x,y,z三个空间周进行转动,同时可以依靠基座上的轴实现转身的动作,以及手部可以灵活转动的轴,增加了其灵活性。六轴机器人可以穿过x,y,z轴,同时每个轴可以**转动,与五轴机器人的**大区别就是,多了一个可以自由转动的轴。现今市场上应用**多的就是六轴机器人。六轴机器人运动方式六轴机器人具有高灵活性、超大负载、高定位精度等众多优点。那六个轴的各自运动路径如何,小编将以FANUCrobotR-2000iB为例来进行详细解读。01、J1旋转(S轴)02、J2下臂(L轴)03、J3上臂(U轴)04、J4手腕旋转(R轴)05、手腕摆动(B轴)06、J6手腕回转(T轴)六轴机器人的机械结构上图为常见的六轴关节机器人的机械结构,六个伺服电机直接通过减速器、同步带轮等驱动六个关节轴的旋转。六轴工业机器人一般有6个自由度,常见的六轴工业机器人包含旋转(S轴),下臂(L轴)、上臂(U轴)、手腕旋转(R轴)、手腕摆动(B轴)和手腕回转(T轴)。6个关节合成实现末端的6自由度动作。
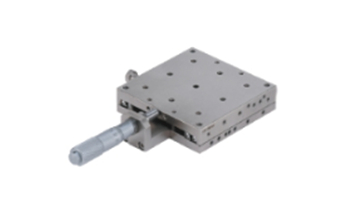
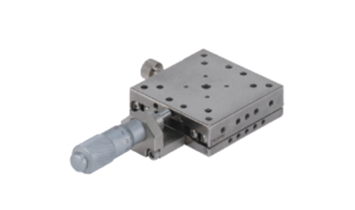
欧规同步带滑台模组!全密式螺杆驱动模组。

直线模组应用领域:1、直线模组主要用在自动化机械上比较多,像德国进口的机床,纸碗机,激光焊接机等等,当然直线导轨和直线轴是配套用的。2、直线模组主要是用在精度要求比较高的机械结构上,直线模组的移动元件和固定元件之间不用中间介质,而用滚动钢球。因为滚动钢球适应于高速运动、摩擦系数小、灵敏度高,满足运动部件的工作要求,如机床的刀架,拖板等。如果作用在钢球上的作用力太大,钢球经受预加负荷时间过长,导致支架运动阻力增大。
丝杆模组和皮带模组那种好。toyo模组哪里好
皮带模组怎么选择电机品牌.台达模组咨询
概述变位机是机器人工作站中常用的一种设备,它除了具备工装夹具的工件安装定位功能以外,还能够通过自身的旋转机构旋转工件,使工件变换角度,便于机器人对工件***无死角的制造加工。变位机通常都是作为机器人的外部轴,可以由机器人控制器直接驱动控制,能够与机器人实现同步、异步以及空间插补运动。变位机根据驱动轴数的不同,可以分为单轴变位机、双轴变位机、三轴变位机等;根据外形的不同可分为U型、L型、C型、座式等。在虚拟仿真项目中,变位机也会经常使用到,弧焊焊接、切割、打磨抛光等工艺应用中尤为常见。RobotStudio软件作为ABB机器人**的虚拟仿真软件,不仅自带了ABB机器人的所有模型,还集成了自家生产的变位机模型,仿真人员可以直接在软件的模型库中导入使用。带变位机机器人系统创建在RobotStudio软件中创建机器人虚拟仿真项目,然后从“ABB模型库”中添加指定型号的机器人与变位机模型。本例程中选择的是一款单轴双座支撑型变位机,其中头座安装有伺服电机,为变位机提供动力,尾座为从动机构,由头座带动做同步旋转运动。将变位机布局到合适位置,然后从软件设备模型库中添加机器人工具、机器人安装底座,并将机器人安装到机器人安装底座上。台达模组咨询