相关滤波的跟踪算法始于2012年P.Martins提出的CSK方法,作者提出了一种基于循环矩阵的核跟踪方法,并且从数学上完美解决了密集采样(Dense Sampling)的问题,利用傅立叶变换快速实现了检测的过程。在训练分类器时,一般认为离目标位置较近的是正样本,而离目标较远的认为是负样本。回顾前面...
目标跟踪基本参数
- 品牌
- 慧视科技
- 型号
- 可咨询
- 输出信号
- 数字型,定制
- 制作工艺
- 集成,薄膜,陶瓷,可定制
- 材质
- 可定制
- 材料物理性质
- 导体,磁性材料,定制
- 材料晶体结构
- 定制
- 加工定制
- 是
目标跟踪企业商机
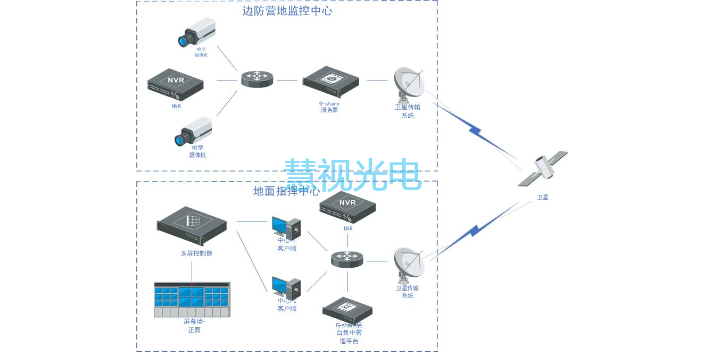
自动化的视频跟踪系统的工作流程一般是摄像机的模拟信号通过视频电缆传送至计算机,计算机通过视频采集卡将模拟视频信号转换为数字视频信号,该转换的输出的数字图像一方面在计算机CRT上显示,同时传送至内存进行目标检测或跟踪(根据需要可同时进行硬盘录像),计算机根据算法的运算结果来控制摄像机的云台,这个控制过程是通过通讯协议卡和双绞线电缆和摄像机的云台接口来完成的。监视和跟踪系统的启动可以是人工的,也可以由系统的报警输入设备启动。高性能的图像卡一般自带显卡,能够避免廉价的多媒体卡长时间地、连续地通过总线传送到计算机的显存而带来的死屏、CPU的占用及总线的占用等问题。Viztra-LE034图像处理板识别概率超过85%。智能化目标跟踪批发商
目标跟踪
视觉跟踪技术是计算机视觉领域(人工智能分支)的一个重要课题,有着重要的研究意义;且在导弹制导、视频监控、机器人视觉导航、人机交互、以及医疗诊断等许多方面有着广泛的应用前景。随着研究人员不断地深入研究,视觉目标跟踪在近十几年里有了突破性的进展,使得视觉跟踪算法不只是局限于传统的机器学习方法,更是结合了近些年人工智能热潮—深度学习(神经网络)和相关滤波器等方法,并取得了鲁棒(robust)、精确、稳定的结果。专业目标跟踪价格信息如何实现目标识别及跟踪?

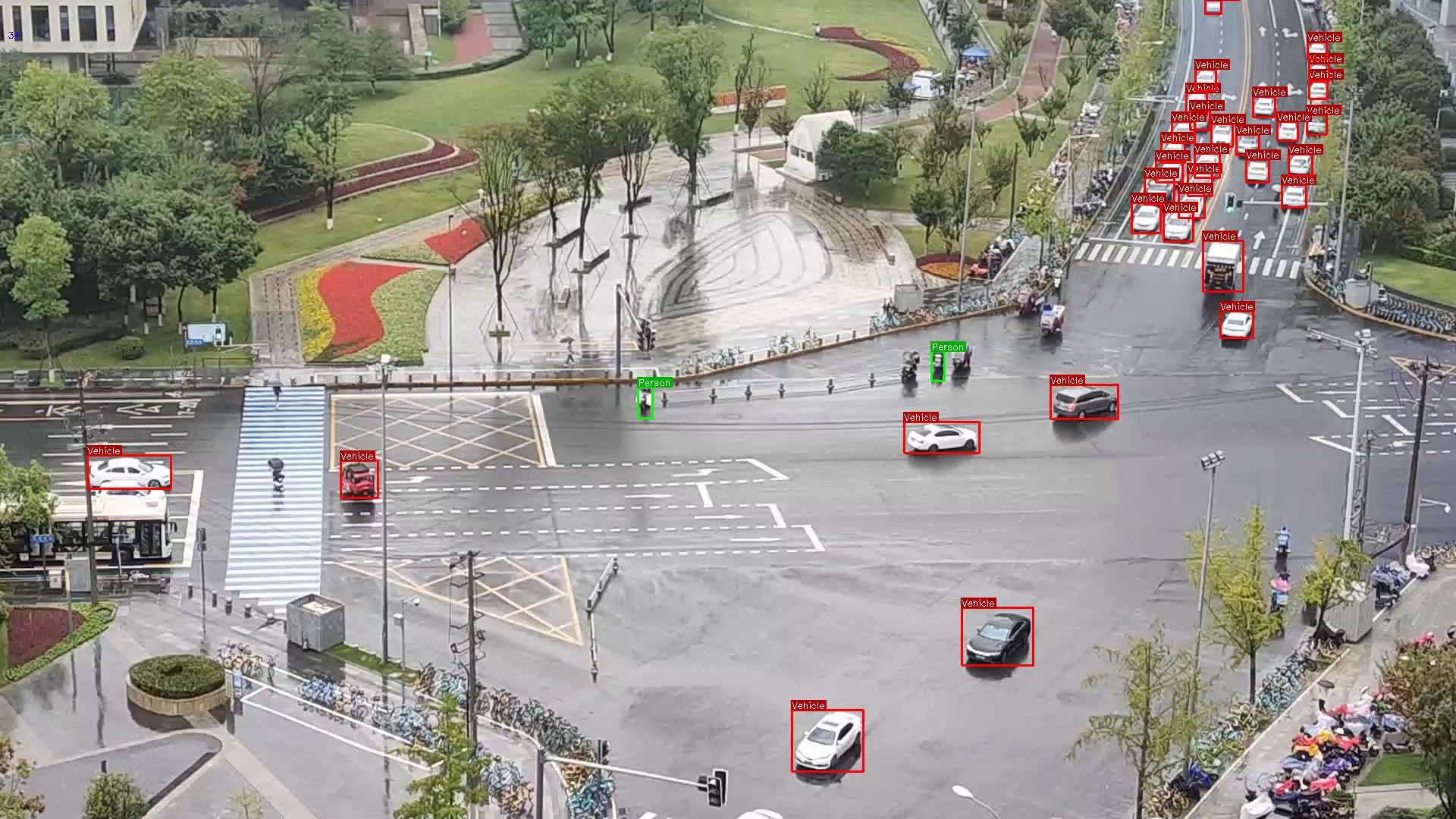
目标检测与目标跟踪这两个任务有着密切的联系。针对目标跟踪任务,微软亚洲研究院提出了一种通过目标检测技术来解决的新视角,采用简洁、统一而高效的“目标检测+小样本学习”框架,在多个主流数据集上均取得了杰出性能。目标跟踪(Object tracking)与目标检测(Object detection)是计算机视觉中两个经典的基础任务。跟踪任务需要由用户指定跟踪目标,然后在视频的每一帧中给出该目标所在的位置,通常由一系列的矩形边界框表示。而检测任务旨在定位图片中某几类物体的坐标位置。对物体的检测、识别和跟踪能够有效地帮助机器理解图片视频的内容,为后续的进一步分析打下基础。
检测器的输出通常被用作跟踪设备的输入,跟踪设备的输出被提供给运动预测算法,该算法预测物体在接下来的几秒钟内将移动到哪里。然而,在无检测跟踪中,情况并非如此。基于DFT的模型要求必须在首帧中手动初始化固定数量的对象,然后必须在随后的帧中对这些对象进行定位。DFT是一项困难的任务,因为关于要跟踪的对象的信息有限,而且这些信息不清楚。结果,初始边界框与背景中的感兴趣对象近似,并且对象的外观可能随着时间的推移而急剧改变。
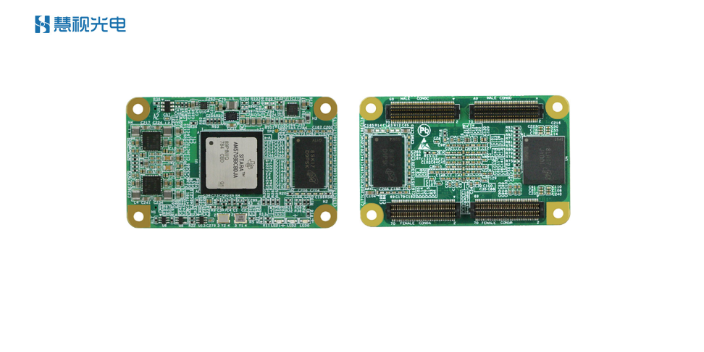
RV1126处理板如何实现目标的识别及跟踪?
用检测器模型去解决跟踪问题,遇到的比较大问题是训练数据不足。普通的检测任务中,因为检测物体的类别是已知的,可以收集大量数据来训练。例如 VOC、COCO 等检测数据集,都有着上万张图片用于训练。而如果我们将跟踪视为一个特殊的检测任务,检测物体的类别是由用户在首先帧的时候所指定的。这意味着能够用来训练的数据只是只是只有少数几张图片。这给检测器带来了很大的障碍。而慧视光电定制的目标跟踪算法可以有效的解决这个问题,通过AI自动图像标注平台SpeedDP的大量模型部署训练,能够有效解决数据训练不足的问题。无人机吊舱能够通过定制算法和精细定位技术实现农药精细喷洒、农作物精细抛粮等操作。青海目标跟踪价格信息
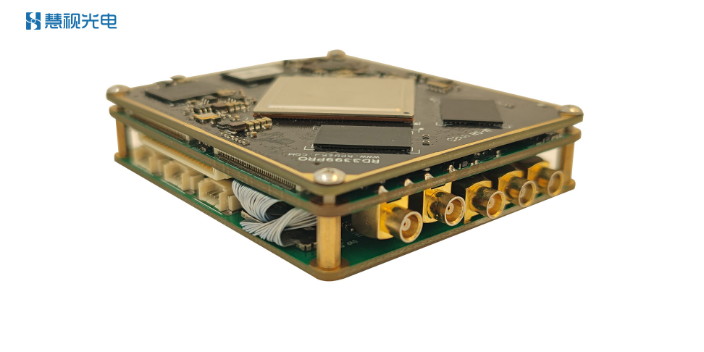
RK3399处理板如何实现目标的识别及跟踪?智能化目标跟踪批发商
YOLO单卷积神经网络在一次评价中直接从全图中预测多个boundingboxes和类概率,在全图上训练并直接优化检测性能,同时学习目标的泛化表示。然而,YOLO对边界框预测施加了严格的空间约束,限制了模型可以预测的相邻项目的数量。成群出现的小物件,如鸟类,对于此模型也同样有问题。fasterR-CNN,一个由全深度CNN组成的单一统一对象识别网络,提高了检测的准确性和效率,同时减少了计算开销。该模型集成了一种在区域方案微调之间交替的训练方法,使得统一的、基于深度学习的目标识别系统能够以接近实时的帧率运行,然后在保持固定目标的同时微调目标检测。智能化目标跟踪批发商
与目标跟踪相关的文章
自主可控目标跟踪诚信推荐
- 高性能目标跟踪工程 2024-10-22
- 辽宁无源目标跟踪 2024-10-22
- 稳定目标跟踪性价比 2024-10-22
- 智能化目标跟踪联系方式 2024-10-22
- 附近目标跟踪技术 2024-10-22
- 低压线目标跟踪好选择 2024-10-22
- 广东网络目标跟踪 2024-10-22
- 福建目标跟踪性价比 2024-10-21
- 广西移动目标跟踪 2024-10-21
- 河南目标跟踪服务电话 2024-10-21
- 黑龙江目标跟踪功效 2024-10-21
- 湖北安全目标跟踪 2024-10-21
与目标跟踪相关的产品



与目标跟踪相关的新闻
-
宁夏目标跟踪价格信息 2024-10-21 14:03:05设想这样一个场景:孙悟空在飞行过程中完成了一次变化(这里假设他变成了一只鸟),但这个变化并不是像西游记拍摄中有烟雾效果完成的,而就是通过身体结构发生渐变来完成的,这种情况下,检测器应该会在后续的检测任务中失败,因为设计好的检测器只是为了检测目标孙悟空的存在,孙悟空变身之后已经不存在这个目标,检测器是...
-
比较好的目标跟踪优势 2024-10-20 10:03:23然后在下一帧采集的图像中对目标对象进行特征提取;特征匹配的过程既是将提取出来的目标对象的特征与我们事先已经建立的特征模板进行匹配,通过与特征模板的相似程度来确定被跟踪的目标对象,实现对目标的跟踪。基于特征的跟踪算法的优点在于速度快、对运动目标的尺度、形变和亮度等变化不敏感,能满足特定场合的处理要求。...
-
辽宁哪里有目标跟踪 2024-10-20 23:03:09如今,无人机在我们生活中的应用越来越广。例如无人机巡检安防领域,无人机能够到达人无法触及的一些角度,能够很大程度上扩大安防检查的覆盖面。在工地、电力、化工等行业,晚上巡检是必不可少的环节,并且晚上巡检还能发现白天无法看到的一些问题,在白天,一般的相机效果很好,能够看到非常清晰的监控画面,但是到了晚上...
-
新疆目标跟踪要多少钱 2024-10-20 01:03:20目标跟踪是在首帧中给定待跟踪目标的情况下,对目标进行特征提取,对感兴趣区域进行分析;然后在后续图像中找到相似的特征和感兴趣区域,并对目标在下一帧中的位置进行预测。作为计算机视觉领域的一个热点研究方向,目标跟踪一直都是一项具有挑战性的工作。目标跟踪技术在导弹制导、智能监控系统、视频检索、无人驾驶、人机...
与目标跟踪相关的问题
新闻资讯
产品推荐
-

河南可视化视频压缩与传输山区
2024-10-26 -
湖北仓储视频压缩与传输提供商
2024-10-26 -

河北物流视频压缩与传输高清
2024-10-26 -
湖北网络目标识别控制软件
2024-10-26 -
河南稳定目标识别解决方案
2024-10-26 -

吉林窄带多路视频压缩与传输专业方案
2024-10-26 -

上海视频目标识别售价
2024-10-26 -
贵州专业激光测距公司
2024-10-26 -
吉林应急救援视频压缩与传输森林
2024-10-26