- 品牌
- 佳控科技
- 型号
- --
- 类型
- 齿轮-蜗杆减速器,蜗杆减速器,摆线减速器,摆线针轮减速器,行星齿轮减速器,圆柱齿轮减速器,无级减速器,谐波减速器
- 载荷状态
- 均匀载荷,强冲击载荷
步进电机减速机错位是指什么?步进电机减速机错位即是失步,失步分为丢步和越步。步进电动机正常工作时,每接收一个控制脉冲就移动一个步距角,即前进一步。若连续地输入控制脉冲,电动机就相应地连续转动。丢步时,转子前进的步数小于脉冲数;越步时,转子前进的步数多于脉冲数。一次丢步和越步的步距数等于运行拍数的整数倍。丢步严重时,将使转子停留在一个位置上或围绕一个位置振动,越步严重时,拖动结构将发生过冲。关于步进电机减速机丢步和失步的分析:步进电机减速机选型不当,电机力矩不够或者物体运动的惯量超过电机自锁力,造成的丢步或失步。驱动器选型不当,配套的驱动器电流偏小,影响电机正常运转,现在市面上很多电流虚标的驱动器,拿峰值电流当额定电流来忽悠消费者,驱动器选型额定电流应大于步进电机减速机额定电流的1.2-1.5倍。配套电源选型不当,配套电源应是驱动器额定电源的1.5-2倍,电源虚标比驱动器虚标更严重。控制部分应排除干扰,远离变频器,防静电。减速机广泛应用于工业生产中的各种机械设备,如输送机、搅拌机、起重机等。嘉定区硬齿面减速机供应商
从成本上来说,目前全球机器人产业的成本构成,35%左右是减速器,20%左右是伺服电机,15%左右是控制系统,机械加工本体可能只占15%左右,其他的部分主要就是应用。可以看出,减速器是制约机器人产业发展的关键因素。目前中国机器人的技术上还缺乏整体的突破。关键部件进口比例较高,就会导致国内制造机器人成本高。特别是减速器,国内企业购买减速器的价格是国外企业的价格的将近数倍。这样国产机器人难以形成价格优势,只有年产量上500-1000台,才有一定的规模效应。因此,中国如果想要形成机器人产业化,摆脱国外机器人企业的掣肘,在机器人领域赢得自主,必须要将减速器国产化加速提上日程。普陀区精密减速机厂家供应减速机在自动化设备中广泛应用,提高生产效率。
减速器1漏油的原因、减压器内外压差:在减速器运行过程中,运动副的摩擦和发热以及环境温度的影响使减速器的温度升高如果没有排气口或排气口被堵塞,减压器内的压力会逐渐升高减速器内部温度越高,与外界的压力差越大,润滑油就会在压力差的作用下从缝隙中漏出。2、减速器结构设计不合理。1)检查孔盖板太薄,拧紧螺栓后容易变形,使结合面不平整,接触间隙漏油;2)减速器在制造过程中,铸件不退火,不时效,不消除内应力,必然会产生变形缝隙和泄漏;3)箱体上没有回油箱,润滑油积聚在轴封内、端盖、接合面等,在压力差的作用下从缝隙向外泄漏;4)轴封结构设计不合理。早期的减速器多采用油槽、毛毡环轴封结构,装配时使毛毡因压缩而变形,密封连接间隙。如果轴颈和密封的接触不理想,由于毛毡的补偿性能差,密封会在短时间内失效。油槽内虽有回油孔,但容易堵塞,回油功能难以发挥。3、加油量过多:减速机运转过程中,油池被搅得很厉害,润滑油溅得减速机内到处都是如果油太多,大量润滑油会积聚在轴封内、结合面等,导致漏电。4、检修工艺不当:设备维修时,由于结合面污垢不完全或密封胶选择不当、密封件方向装反、不及时更换密封件也会导致漏油。
行星减速机的精度单位为孤分:1度分为60弧分。例如,当回程间隙标记为1min时,表示减速机每转一圈,输出端的角度偏差为1/60。在实际应用中,这个角度偏差与轴的直径有关,b = 。也就是说,当输出端半径为500mm时,齿轮箱的接触度为10,即a"=3/60,减速机一转的偏差为B = 0.44mm,行星齿轮箱的传动精度也叫回程间隙。减速机的回程间隙是当输出端固定,输入端顺时针和逆时针旋转,使输出端产生2%的额定扭矩时,减速机的输入端有微小的角位移,这就是回程间隙。减速机是工业设备中的重要部件,确保动力传输的稳定。

精密减速机作为机器人**零部件,占据了机器人整机约35%的成本。同时,减速机在工业机器人的**零部件中技术壁垒极高,间隙或过盈配合的微小偏差都会导致接触刚度和啮合刚度的成倍差异,进而影响工业机器人运动参数的极大变化。对于机器人关节用高精密减速机,日本具备*****优势,目前世界机器人市场约75%的精密减速机被日本企业垄断,是中国工业机器人行业亟待解决的“卡脖子”难题。与此同时,机器人行业日益增长的需求,也使得**精密减速机“卡脖子”难题变得更加迫在眉睫。据国家统计局及第三方研报数据,2021年中国机器人产量36.6万台,同比增长44.90%。国产工业机器人的市占率从2015年的16.4%提升至目前的25%以上。另据IFR预测,全球工业机器人2022年至2024年每年新安装量将分别较2020年同比增长18%、27%、35%。可见在全球机器人高速增长的趋势下,行业对于高精密减速机的需求将会呈现百万量级的爆发式增长。对蜗轮蜗杆减速电机不能对减速机(自锁)施加逆向传动的较大负荷。闵行区精密型减速机供应
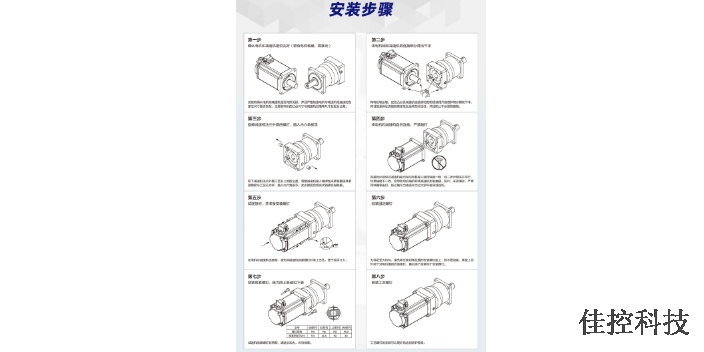
有键空心输出轴与工作机轴联接时应涂防锈油,装入时应轻松推入或用螺旋拉入。嘉定区硬齿面减速机供应商
这是比较直观,但是比较少人关注的一个点。其实发热也是上面讲的精度有关。减速机精度取决于齿轮的啮合程度,啮合间隙过大,减速机的精度就差,而采用微过盈的方式,精度就会提高,但是就会导致发热过大的问题。RV上,采用帝人结构的发热的区别还没有那么明显,而同样是谐波减速机,不同品牌的发热程度就差很多了。别的不说,谐波里面,HD是一家可以既可以精度高又可以发热少的厂家。大佬的称号绝不是浪得虚名。当然,发热除了与齿轮有关之外,还跟油脂、跟装配有关,油脂的好坏,装配的能力都会有明显的影响。这里有很多的细节工艺,这就看各个机器人厂家的技术能力了。嘉定区硬齿面减速机供应商
- 涡轮蜗杆减速机 2026-04-21
- 普陀区高精密减速机品牌 2026-04-21
- 转角高精密减速机厂家供应 2026-04-21
- 浙江专业减速机产品介绍 2026-04-21
- 静安区转角高精密减速机 2026-04-21
- 浙江高精密减速机大概多少钱 2026-04-21
- 松江区高精密减速机哪里好 2026-04-21
- 松江区硬齿面减速机 2026-04-20
- 青浦区精密型减速机 2026-04-20
- 嘉定区齿轮减速机供应商 2026-04-20
- 江苏硬齿面减速机品牌 2026-04-20
- 虹口区减速机产品介绍 2026-04-19