激光位移传感器的工作原理是利用激光发射光束投射到被测物体表面,接收反射光并将光信号转换为电信号输出,从而获取被测物体空间位置信息。根据激光源发射光束的不同,激光传感器可分为点、线两种。点激光位移传感器在一个采样周期内只能获得被测量的一维信息,使用时通常依托于三坐标测量机或三坐标机床等设备,通过设备机械运动及传感器同步扫描来获取被测物体三维信息。因此,激光位移传感器在精密测量领域有着广泛的应用。。。光谱共焦位移传感器具有非接触式测量的优势,可以在微观尺度下进行精确的位移测量。优势光谱共焦位移传感器量大从优

本实用新型解决的技术问题在于,针对现有技术的上述缺陷,提供一种光谱共焦位移传感器,旨在通过光谱共焦工作原理,避免通过激光直接照射到物体表面而呈现颗粒状的散斑,克服不易确定像点的质心位置的缺陷。本实用新型解决技术问题所采用的技术方案如下: 一种光谱共焦位移传感器,包括底座,其中,还包括有:光源耦合器,所述光源耦合器用于产生多色光; 入射光纤,所述入射光纤的入光端固定连接在所述光源耦合器中并用于接收所述光源耦合器所发出的多色光;品牌光谱共焦位移传感器产品基本性能要求该传感器可以与其他测量设备相结合,实现多参数的综合测量。

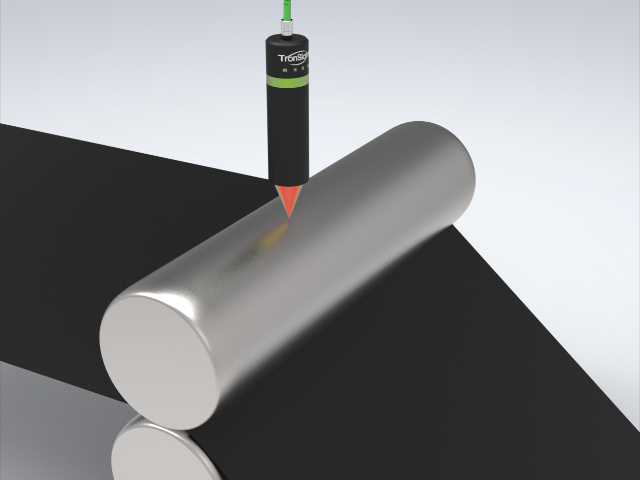
光学头内部的结构不受限制,并且可以适当地设计。例如,可以使用诸如孔和准直透镜等的其它透镜。在本实施例中,可以通过No.1光学头和第二光学头来测量待测物体上的两个测量点的位置。换句话说,可以同时对作为No.1 光学头和第二光学头的测量对象的两个测量点和进行多点测量。当然,本发明不限于在同一待测物体0上进行多点测量的情况,并且可以同时测量两个不同的待测物体。将从No.1光学头和第二光学头射出的测量光和经由光纤和引导至控制器。射出绿色光作为测量光和。当然,本发明不限于射出同一波长光的情况,并且可以射出分别与测量点和的位置相对应的波长光。
机壳设置有两层,聚焦透镜组位于所述机壳的上层,感光元件位于机壳的下层,所述聚焦透镜组与所述感光元件的光路之间设置有用于转变光线传播方向的光线转向镜组,光线转向镜组包括有上反光镜,设置在上反光镜下方位置的下反光镜,光线转向镜组用于使上层的聚焦透镜组射出的光线聚焦到下层的感光元件上。这样,通过光线转向镜组使光线实现掉头转向,从而充分利用上下空间,使原有的水平光路变换为上下光路,使光谱仪的长度变短,有利于光谱仪小型化和便携化。该传感器可用于微纳制造、生物医学和半导体制造等领域的精密测量。
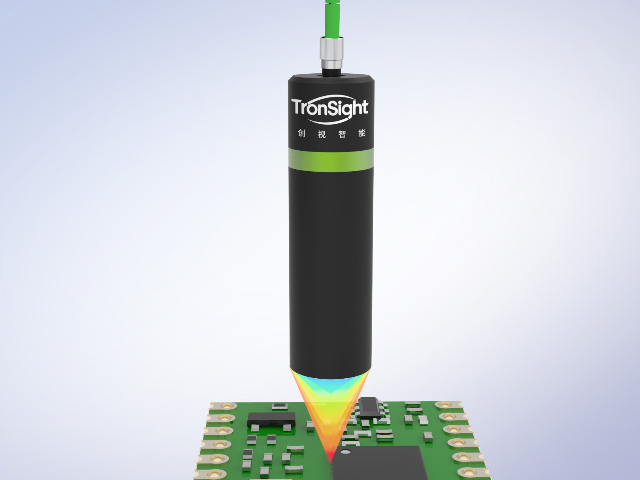
被测物体表面反射的反射光通过探头选择性的接收并由接收光纤传输到光谱仪,光谱仪对反射光进行聚焦并通过设置在光谱仪中的感光元件对反射光进行量化处理,量化后的光波在光谱仪上产生一个光谱波峰,光谱曲线的峰值位置与聚焦于被测物体表面的波长产生对应关系;光谱仪将波长、被测物体的位移和光谱波峰位置三者建立对应关系后进行分析,通过光谱波峰位置反推出被测物体的位移,实现光谱共焦测量位移的过程,通过光谱共焦工作原理,避免激光直接照射到物体表面而呈现颗粒状的散斑,克服不易确定像点的质心位置的缺陷。该传感器可被应用于微纳制造、生物医学和半导体制造等领域中的精密测量。金华光谱共焦位移传感器常用解决方案
光谱共焦位移传感器是一种高精度、非接触式的位移测量传感器。优势光谱共焦位移传感器量大从优
随着精密和超精密制造业的迅速发展,对高精密的检测需求也越来越高,因此高精密的位移传感器也应运而生。超精密的位移传感器精度可达到微纳米级别;传统的接触式测量虽然也有较高的精度,但是由于其可能会划伤被测物体表面,而且当被测物体为弱刚性或是轻软材料时,接触式测量也会造成弹性形变,引入测量的误差,而且接触式测量速度较慢,难以实现自动化测量,基于接触式测量存在的诸多不足,因此非接触式位移传感器受到了更大的关注。如今非接触式测量主要有电磁式和光电式两类,电磁式位移传感器对被测物体的材料类型有要求,因此不具有wide适用性,而且外界的电磁信号的干扰也会对测量的精度造成影响;高精密光电式位移传感器,目前常用的是基于激光三角法的位移传感器,其测量原理是激光光源打在被测物体表面,反射的光经过收光镜简,在光电探测器CCD上成像通过算法标定可以推算出被测物体的位移。目前的光谱共焦位移传感器大多采用分光镜和线阵CCD采集干涉条纹的方法,通过两束光源产生干涉,干涉条纹的宽度信息可以反映被测物的位移量测量信息,此种方案结构复杂,成本相对较高;传统的激光三角法光路容易出现遮挡,导致接收反射光困难,对透明玻璃或表面有凹坑的材料等更是难以测量。优势光谱共焦位移传感器量大从优