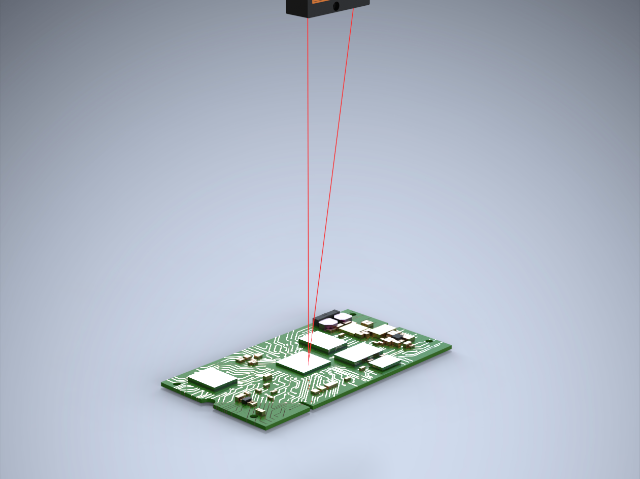
激光位移传感器利用光学三角法原理 ,通过将激光发射光束投射到被测物体表面,利用漫反射效应接收反射光并将光信号转换为电信号输出,从而获取被测物体空间位置信息 。随着现代技术的发展 ,激光位移传感器已成为非接触测量领域的重要手段,并可以通过与计算机及应用软件配合实现测量数据实时处理,为工业生产制定相关决策提供帮助。激光位移传感器具有结构小巧、测量速度快、精度高 、测量光斑小、抗干扰能力强和非接触式的测量特点,广泛应用于微位移测量领域。其应用主要是用于非标的检测设备中,国内所使用的激光非接触测量仪器几乎主要依靠国外进口。激光位移传感器在工业生产和科学研究中有着广泛的应用。工厂位移传感器的精度

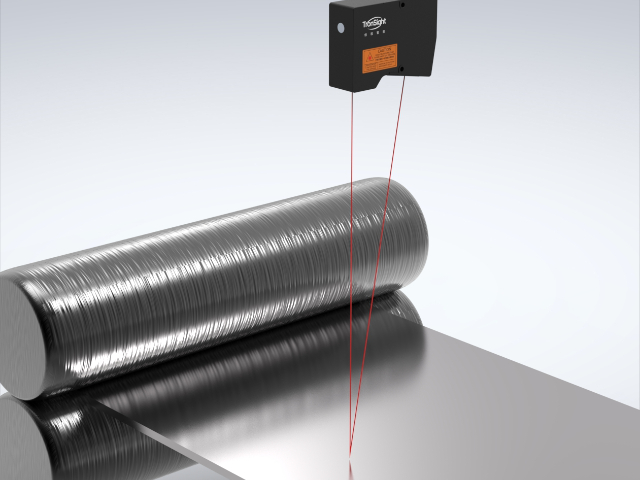
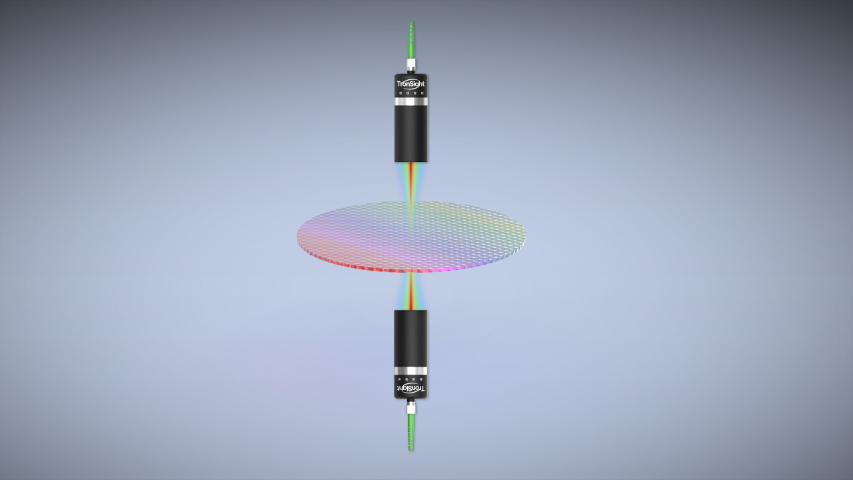
液晶玻璃基板品质管控要求严格、设备精度要求高,传统的接触式测厚装置因其测量精度差、测量频次有限而无法形成连续测量、接触式测量装置损耗快,需频繁定期更换等不足 ,已无法满足当前生产要求。激光测厚装置的应用有效弥补了接触式测厚装置的不足,从效率、精度、准度、连续性、可追溯性上对测厚技术进行升级。激光是由激光器产生的一种特殊的平行光束,它具有方向性强、亮度高、颜色纯、光脉冲宽度窄等优异物理特性。激光在线测厚仪一般是由两个激光位移传感器上下对射的方式组成,上下的两个传感器分别测量玻璃基板上表面的位置和下表面的位置,通过计算机计算得到玻璃基板的厚度。高采样速率位移传感器企业激光位移传感器,可以测量物体的线性位移、倾角位移和振动等参数。

高精度激光位移传感器是一种用于测量物体的位置和位移的重要设备 。在工业生产和科学研究领域,激光位移传感器被广泛应用,以确保精确的测量结果和稳定的性能。然而,安装操作是影响激光位移传感器性能的关键环节。本文将重点介绍高精度激光位移传感器安装操作的注意事项,以帮助用户正确、有效地进行安装。首先,安装位置的选择至关重要。在选择安装位置时,应考虑到测量目标的特性和环境条件。激光位移传感器对测量目标的表面特性和光照条件有一定要求,因此应选择平整、清洁的表面作为安装位置,并避免强烈的光线直接照射到传感器上。此外,还应考虑到传感器与测量目标之间的距离和角度,以确保测量结果的准确性和稳定性。
安装过程中需要注意保护传感器光学部件。激光位移传感器的测量原理是通过激光束对测量目标进行照射,并通过接收反射光信号来计算位移。因此,在安装过程中,应特别注意保护传感器的光学部件,避免碰撞和污染。在安装完成后,还应定期清洁光学部件,以确保传感器的测量精度和稳定性。另外,安装过程中需要注意传感器的固定方式。传感器的固定方式直接影响到传感器的稳定性和测量精度。在选择固定方式时,应考虑到安装位置的特点和测量要求,选择合适的固定方式,并确保固定牢固、稳定。同时,还应避免传感器与外部振动源接触 ,以免影响测量结果。激光位移传感器的研究对于提高工业生产效率具有重要作用。

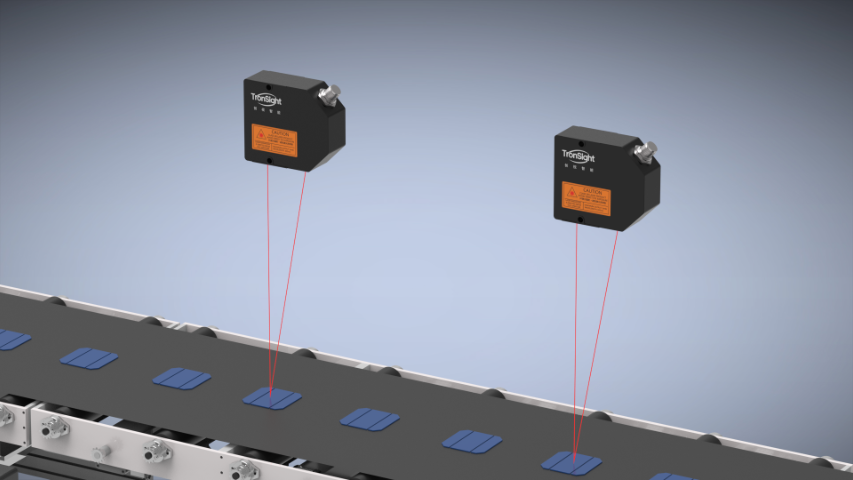
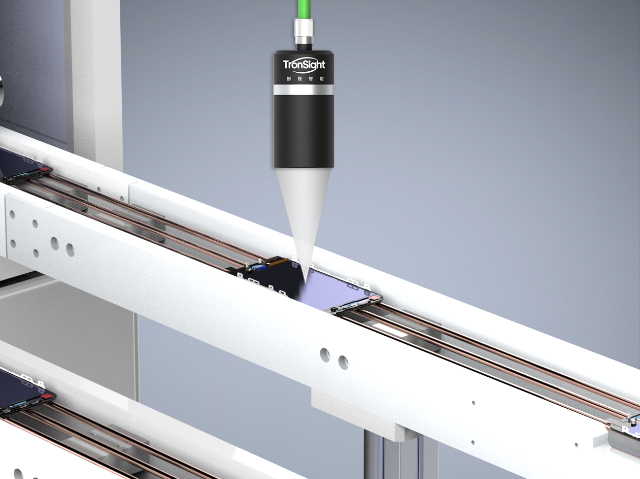
激光位移传感器在手机组装行业中也有着广泛的应用。在手机制造过程中,需要对各个组件进行精确的测量,以确保其质量和可靠性。其中,激光位移传感器可以应用于段差测量。通过将激光发射光束投射到被测组件表面,利用漫反射效应接收反射光并将光信号转换为电信号输出,从而获取被测组件的位移信息。通过使用激光位移传感器进行段差测量,可以快速、准确地检测出组件间的差异,从而提高手机制造过程的效率和质量。此外,激光位移传感器还可以应用于手机外观检测、液晶屏组装等领域,为手机制造过程提供准确 、可靠的测量数据。为了优化激光位移传感器在手机组装后的段差测量等行业应用,需要进一步提高其测量精度和稳定性。在制造过程中,激光位移传感器可能会受到环境因素的影响,如温度、湿度等,这可能会影响测量结果的准确性。因此,需要对激光位移传感器进行精确定标和校正,以确保其测量结果的准确性和可靠性。在实际应用中,还应根据具体需求选择合适的激光位移传感器型号和参数,以满足不同应用场景的测量需求。激光位移传感器可以测量物体的线性位移 、倾斜度 、旋转角度弯曲度、振动等参数,具有多种功能。高频位移传感器供应
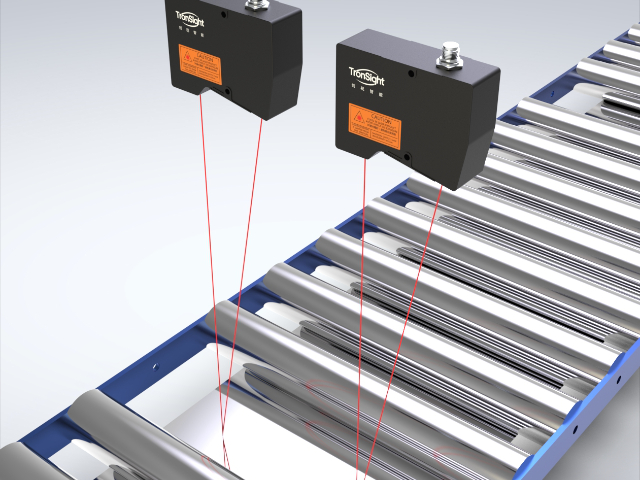
不同的应用场景 需要选择不同类型的激光位移传感器 ,以满足测量要求。工厂位移传感器的精度
随后安装在贴装台单元上的激光位移传感器403检测键合头370上拾取的芯片的倾角,结合两位移传感器360和403的初始角度差值,利用调平机构340对芯片做出与贴装台401上贴装位间的平行调整;其调平的具体实现过程如下:音圈电机343动作,从而实现音圈模组341产生平行于电机轴向的位移,继而导致下方动平台342产生绕u轴或者v轴(与 u轴垂直)方向的转动,从而实现动平台342倾角的调整,使得连接在动平台上的键合头370与贴装台401上基板贴装位平行,保证键合压力均匀;工厂位移传感器的精度