此外,光斑尺寸还会受到激光束的发散角度、被测物体表面的反射率等因素的影响。为了减小这些因素对光斑尺寸的影响,可以采用一些方法进行优化。例如,可以采用透镜或棱镜对激光束进行聚焦和调整,以控制光斑尺寸和形状。此外,还可以采用适当的激光波长和功率,并合理选择被测物体表面的涂层材料,以提高测量精度和可靠性。在实际应用中,需要根据具体的测量场景和要求选择适当的光斑尺寸和激光位移传感器型号,以满足不同精度要求的测量需求。同时,在使用过程中需要注意对激光位移传感器的保养和维护,以保证其长期稳定的工作性能。激光位移传感器具有响应速度快、精度高、不受磁场、温度影响等优点。国内位移传感器详情

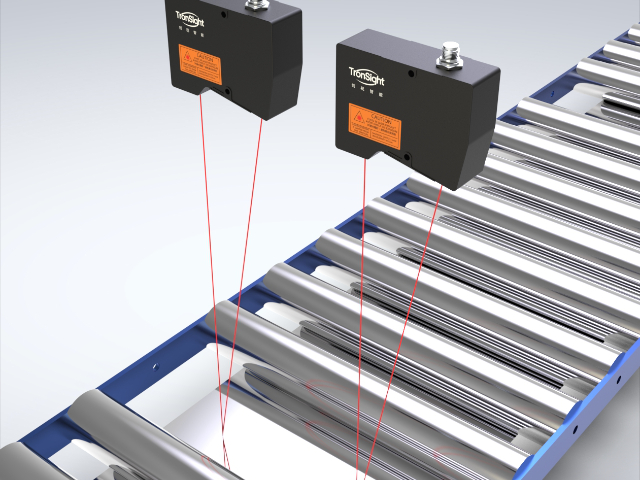
针对车桥减速器桥壳轴承孔的同轴度检测问题,设计了一种基于二维激光位移传感器的同轴度检测装置。该装置通过二维激光位移传感器在孔内旋转一周进行测量数据采集,并利用编码器实现了采集过程的闭环管控,采用该装置可提高数据采集效率。为了进行同轴度计算,提出一种针对三维点云数据的小二乘迭代法。首先,将采集到的角度、径向距离转换成三维坐标的点云数据形式。接着,以残差小为优化目标,利用高斯一牛顿迭代方法确定出轴线。该方法利用了整个圆柱孔测量数据,并通过基于残差小的优化方法计算得到两端孔的轴线和它们的公共轴线,然后,以公共轴线为基准计算出同轴度误差。与传统的通过计算多个横截面中心来确定轴线的方法相比,该方法提高了计算精度。同时,针对影响同轴度测量精度的一些因素,如测量装置的安装精度、转轴的径向跳动等进行了分析,并给出误差补偿方案。将该装置的测量结果与三坐标测量结果进行对比,验证了该方法的正确性。国内位移传感器不同型号的激光位移传感器在精度、测量频率、成本等方面存在差异,需要根据实际需求进行选择。

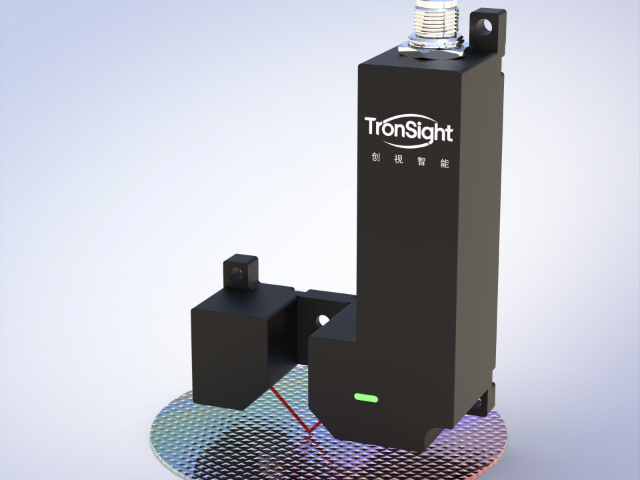
激光位移传感器具有结构小巧、测量速度快、精度高、测量光斑小、抗干扰能力强和非接触式的测量特点,因此在微位移测量领域广泛应用。其测量原理是利用激光单色和准直特性将垂直入射测距面上的激光点通过光学系统将其缩小的实像成像在接收光敏面上。通过计算光斑实际的位移大小,就可以实现对物件位移量的测量。激光位移传感器主要由激光发射、光学成像系统、图像传感器、驱动电路、信号放大处理电路、单片机处理电路和数据输出部分组成。研究激光位移传感器的系统特点和工作原理对于提高其测量精度和稳定性具有重要意义。
激光位移传感器作为一种高精度、高灵敏度的传感器,已成为武器装备制造和维护中必不可少的工具。它可以测量武器装备的位置和位移,以及其运动状态、速度和加速度等动态参数,并实时输出准确的控制信号,实现对武器装备的精密定位和运动控制。在武器装备制造中,激光位移传感器可以用于检测武器装备的加工和装配精度,并提供实时反馈信号,以保证其精度和可靠性。在武器装备维护中,激光位移传感器可以用于检测武器装备的运动状态、位置和位移变化,以及其结构和组件的磨损情况,以确保其性能和可靠性。激光位移传感器利用激光束进行测量,能够测量微小的变化,精度高达纳米级。

在激光三角法的光学成像系统中,像点移动的位移是测量结果的依据,作为成像对象的激光斑点的尺寸对测量的精度有很大的影响。在一个衍射受限系统中,成像的焦深大小为:它是表征光斑能清晰地成像在探测器上的纵向范围,一定的焦深范围是激光三角测量传感器实现精密测量的前提条件。,当用激光三角法测量易拉罐罐盖开启口刻痕的残余厚度时,希望不仅能精确地探测出A部位,而且还能探测出B部位的细节。当激光光斑直径较大时,此时焦深也较大,虽然成像的纵向范围扩大了,激光测量的动态范围提高了,但是在探测B部位时,激光三角测量传感器探测的细节能力降低了,基本上没法探测出B部位的具体细节;当通过增大会聚物镜的数值孔径NA时,光斑的尺寸减小了,探测细节能力增强了,但是成像的焦深范围却大大减小了,也导致激光三角测量传感器不能可靠地探测。所以,利用激光三角法测量易拉盖开启口刻痕时,减小光斑尺寸与增大焦深范围是一对矛盾,它在一定程度上限制了激光三角法在易拉罐罐盖开启口刻痕测量中的使用。因此,在用激光三角法测量易拉罐罐盖开启口刻痕的残余厚度时,应合理设计光学系统,选择合适的激光光斑尺寸。激光位移传感器可分为点、线两种形式。有哪些位移传感器哪个品牌好
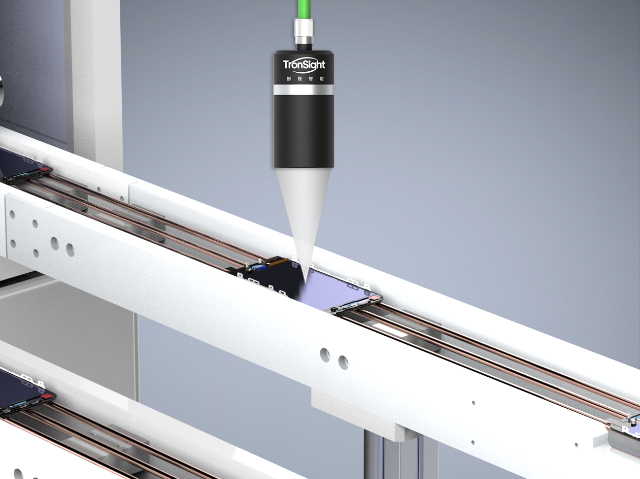
激光位移传感器可以实现非接触式测量,对物体不会产生实际接触,避免对其造成损伤或污染。国内位移传感器详情
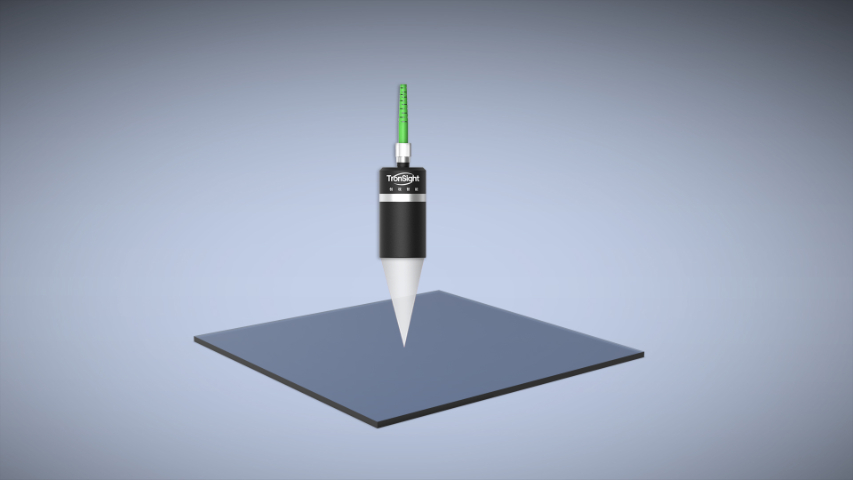
激光三角法原理激光三角法原理框图如图所示,由光源发出的一束激光照射在待测物体平面上,通过反射之后在检测器上成像。当物体表面的位置发生改变时,其所成的像在检测器上也发生相应的位移。通过像移和实际位移之间的关系式,真实的物位移可以由对像移的检测和计算得到,计算公式为:
x=ax'/(bsinθ-x'cosθ)(1)
式中:x,x'分别是被测物位移和光敏器件上像斑的位移;a,b,θ是系统的结构参数,是根据具体使用要求而选定的。由此可见精确地测量X7就可以得到被测物体的位移量,这就是激光三角法测量位移的原理。 国内位移传感器详情