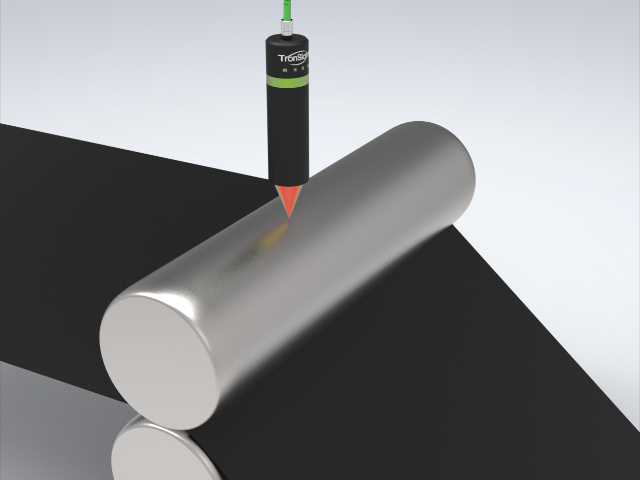
采用激光三角法测量易拉罐罐盖开启口压痕的残余厚度时,要求不仅能测量生产线上易拉罐罐盖开启口刻痕的残余厚度,而且还要对易拉盖模具的磨损情况进行评估。此时,激光三角法的测量精度除了会受到散斑的影响外,还会受到精细结构对测量精度的影响。激光三角法测量的重要假定是发射光束始终与被测物体表面法线方向一致,约定被测表面上入射光点处的法线与入射光方向不重合时称被测表面发生了倾斜,其夹角称为倾斜角E53。当用激光束照射易拉盖的开启口刻痕的斜面和拐角时,被测物表面与入射光不是垂直的,即被测面发生了倾斜。此时,即便物光点的位移与垂直入射时相同,但由于被测面的倾斜改变了散射光的光场相对于接收透镜的空间分布,使得电荷耦合器件(CCD)上会聚光斑的光能质心的位置相对于垂直入射时发生了改变,因而CCD的输出不再与垂直入射式相同。在此情形下,若仍使用垂直入射时的标定曲线来确认位移,必然会产生误差。这就是精细结构对测量精度的主要影响。激光位移传感器是一种高精度、高分辨率的测量仪器,基于激光干涉原理进行测量。非接触式位移传感器厂家供应

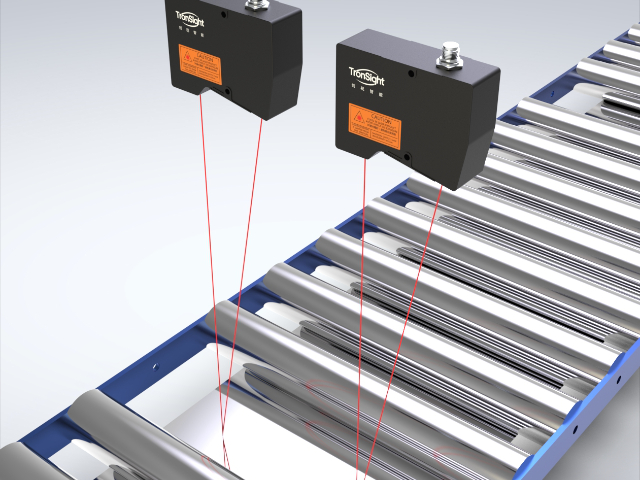
无论是医疗设备、智能手机还是机床,几乎每个电子设备内部都有一块PCB板。这些设备正被要求变得更高效、更小、更快,而开发周期却越来越短。这也意味着电路板必须通过使用高度集成的组件变得更加强大。除了不断增长的封装密度之外,单个组件和开关的小型化是满足所需性能的关键因素。电子元件的准确定位对于确保信息信号或电能信号形式的电流轻松流过元件至关重要。对于PCB制造,这些必须在正确的高度位置和正确的水平位置上,以便正确连接它们。对测量系统的高要求检查生产线中高度集成组件位置的传感器必须克服一系列挑战。主要是由于极小的组件而要求光斑焦点直径小,由于高度动态的生产过程而要求测量速度高,以及由于必须检测的位移变化而要求的测量精度高。使用非接触高精度的激光位移传感器都可以满足这类要求。非接触式位移传感器厂家供应激光位移传感器可以实现非接触式测量,对物体不会产生实际接触,避免对其造成损伤或污染。

近年北京市轨道交通建设发展迅速,截止目前运营线路已达19条,为及时掌握高架线路运行状态,自2012年起北京地铁陆续在5号线、13号线、八通线、机场线、亦庄线、房山线、昌平线和15号线高架线路上安装自动化监测系统,开展对桥梁梁体的位移、裂缝、支座位移、梁体应力、挠度、环境温度和风力风向等参数的监测。位移是结构监测的重要参数之一,在进行位移传感器选型设计时,为避免接触式位移传感器存在的精度低、易磨损、长期稳定性差等缺点,本文将激光位移传感器用于梁体、支座位移和结构微裂缝的测量。激光位移传感器至今少有本身质量出现异常或损坏的情况,取得了良好效果,为传感器的选型设计和运行维修积累了经验。
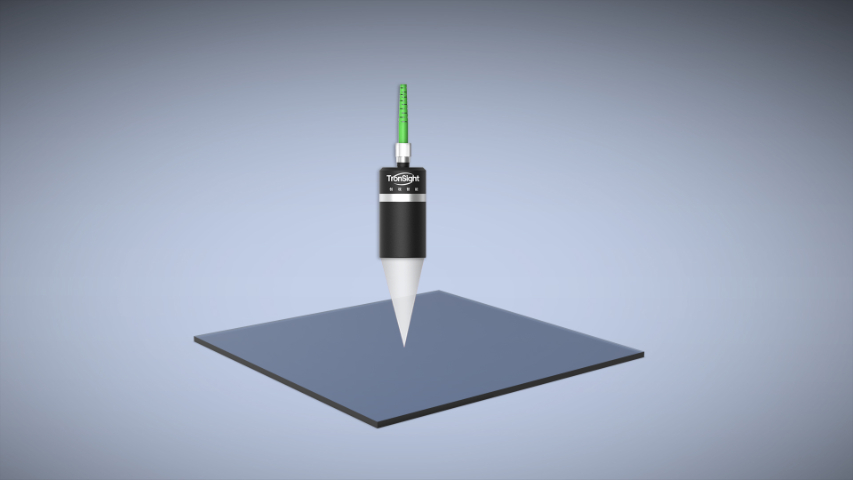
在激光三角法的光学成像系统中,像点移动的位移是测量结果的依据,作为成像对象的激光斑点的尺寸对测量的精度有很大的影响。在一个衍射受限系统中,成像的焦深大小为:它是表征光斑能清晰地成像在探测器上的纵向范围,一定的焦深范围是激光三角测量传感器实现精密测量的前提条件。,当用激光三角法测量易拉罐罐盖开启口刻痕的残余厚度时,希望不仅能精确地探测出A部位,而且还能探测出B部位的细节。当激光光斑直径较大时,此时焦深也较大,虽然成像的纵向范围扩大了,激光测量的动态范围提高了,但是在探测B部位时,激光三角测量传感器探测的细节能力降低了,基本上没法探测出B部位的具体细节;当通过增大会聚物镜的数值孔径NA时,光斑的尺寸减小了,探测细节能力增强了,但是成像的焦深范围却大大减小了,也导致激光三角测量传感器不能可靠地探测。所以,利用激光三角法测量易拉盖开启口刻痕时,减小光斑尺寸与增大焦深范围是一对矛盾,它在一定程度上限制了激光三角法在易拉罐罐盖开启口刻痕测量中的使用。因此,在用激光三角法测量易拉罐罐盖开启口刻痕的残余厚度时,应合理设计光学系统,选择合适的激光光斑尺寸。激光位移传感器的测量范围通常较小,但可以通过搭配不同的反光板、透镜等配件实现不同范围的测量。

智能车技术涵盖了车辆工程、传感器、人工智能、自动管控、汽车电子、计算机等多个学科领域[13,智能车的研究在智能交通领域已成为研究热点。飞思号尔智能汽车竞赛要求参赛车模沿着任意给定的黑色带状路径,通过管控转向和车速,在稳定的前提下以较快的速度完成自主寻径¨j。本文以此为背景,设计了基于MC9S12XSl28微管控器的智能车系统,采用激光传感器阵列识别路径信息,得到智能车中心线与路径中轴线韵横向偏差.采用比例管控算法管控舵机转向,并对直流驱动电机进行增量式PID闭环调节管控,从而实现智能模型车快速稳定地自主寻径行驶。激光位移传感器在智能制造、机器人、医疗等领域具有巨大的应用前景,是现代工业技术发展的重要组成部分。智能位移传感器找谁
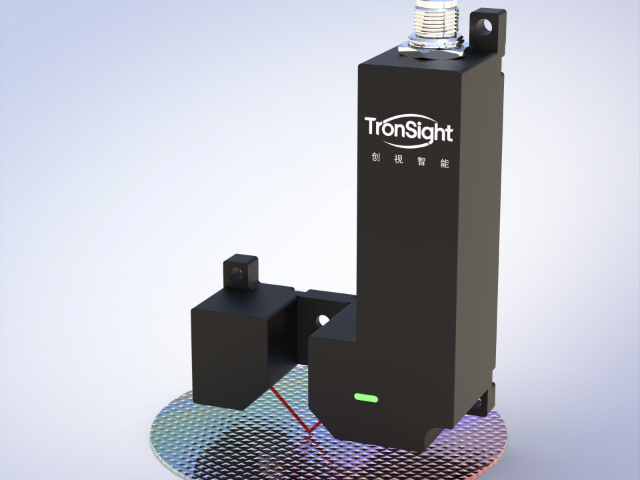
激光位移传感器的使用需要特别注意安全事项,避免对眼睛和皮肤产生伤害。非接触式位移传感器厂家供应
近年来,重型货车及大型客车的发展对车桥的承载能力、输出转矩等能够满足严重超载的性能提出了更高的要求。减速器是驱动车桥的重要部件。减速器壳总成中,对动齿轮轴承孑L之间的同轴度精度要求是汽车稳定运行和齿轮正确啮合的关键,因此对车桥减速器两端轴承孔同轴度的研究有重要的意义。同轴度是机械产品检测中常见的一种形位公差。对于规则轴类零件,一般可采用V型支架、钢球加杠杆百分表或偏摆仪等检具及组合辅具来检测同轴度;对于箱体类孔零件,一般可采用芯轴加杠杆百分表或利用圆度仪来检测同轴度,但对于一些大型零部件(如机床主轴等)、不规则轴类零件以及箱体零件的不规则内孔,采用常规方法测量同轴度则很难实现或非常麻烦。此时常用的方法有激光准直法、三坐标测量机(CMM)与激光位移传感器法。激光准直法通过选用多个内孔截面来测量同轴度误差口,该方法并不能全方面地反映孔内信息,不适合于高精度孑L内同轴度测量。非接触式位移传感器厂家供应