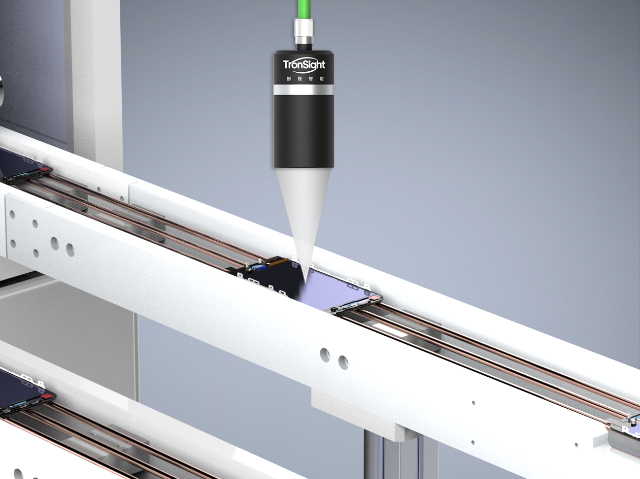
现在的电子设备需要更高效、更小、更快的PCB板,而这些板必须通过使用高度集成的组件变得更加强大。为了确保这些组件在正确的位置上连接,需要使用高精度的测量系统来检测它们的位置。这对传感器提出了一系列挑战,包括需要小的光斑焦点直径、高测量速度和高测量精度。使用非接触高精度的激光位移传感器可以满足这些要求,它们可以检测PCB板和高度集成的组件的位置,以确保它们在正确的高度位置和水平位置上连接。这些传感器可以应用于医疗设备、智能手机和机床等各种电子设备的制造中。不同品牌和型号的激光位移传感器在性能、价格、适用场景等方面存在差异。光电位移传感器免费咨询

激光位移传感器的分辨率是指其可以测量到的小位移量,通常以微米或纳米为单位。分辨率是激光位移传感器的重要性能指标之一,影响着其测量精度和可靠性。测试激光位移传感器的分辨率需要注意被测物体的表面状态和光斑大小等因素,以保证测试结果的准确性。为了优化激光位移传感器的分辨率,可以优化光学系统设计、采用更高精度的信号处理电路和算法、对光学系统进行精细调整等。同时,根据具体应用场景选择适当的激光位移传感器型号和参数也能够满足不同精度要求的测量需求。新型位移传感器的原理激光位移传感器的使用需要特别注意安全事项,避免对眼睛和皮肤造成伤害。

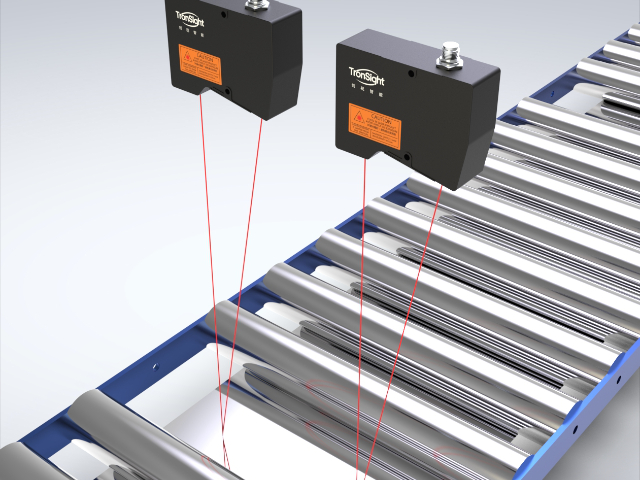
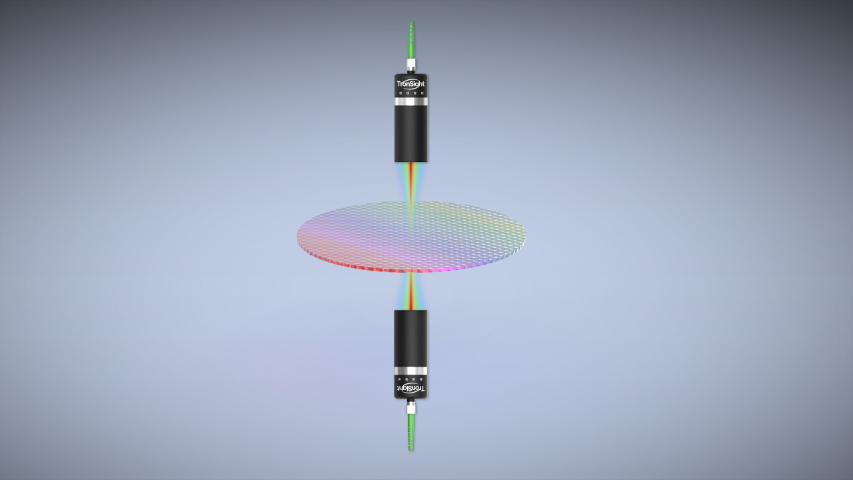
液晶玻璃基板品质管控要求严格、设备精度要求高,传统的接触式测厚装置因其测量精度差、测量频次有限而无法形成连续测量、接触式测量装置损耗快,需频繁定期更换等不足,已无法满足当前生产要求。激光测厚装置的应用有效弥补了接触式测厚装置的不足,从效率、精度、准度、连续性、可追溯性上对测厚技术进行升级。激光是由激光器产生的一种特殊的平行光束,它具有方向性强、亮度高、颜色纯、光脉冲宽度窄等优异物理特性。激光在线测厚仪一般是由两个激光位移传感器上下对射的方式组成,上下的两个传感器分别测量玻璃基板上表面的位置和下表面的位置,通过计算机计算得到玻璃基板的厚度。
针对车桥减速器桥壳轴承孔的同轴度检测问题,设计了一种基于二维激光位移传感器的同轴度检测装置。该装置通过二维激光位移传感器在孔内旋转一周进行测量数据采集,并利用编码器实现了采集过程的闭环管控,采用该装置可提高数据采集效率。为了进行同轴度计算,提出一种针对三维点云数据的小二乘迭代法。首先,将采集到的角度、径向距离转换成三维坐标的点云数据形式。接着,以残差小为优化目标,利用高斯一牛顿迭代方法确定出轴线。该方法利用了整个圆柱孔测量数据,并通过基于残差小的优化方法计算得到两端孔的轴线和它们的公共轴线,然后,以公共轴线为基准计算出同轴度误差。与传统的通过计算多个横截面中心来确定轴线的方法相比,该方法提高了计算精度。同时,针对影响同轴度测量精度的一些因素,如测量装置的安装精度、转轴的径向跳动等进行了分析,并给出误差补偿方案。将该装置的测量结果与三坐标测量结果进行对比,验证了该方法的正确性。激光位移传感器的应用可减少人力,成本支出,从而提高效率,节约成本。

激光三角法测量原理可有效应用于三维曲面的非接触精密测量,测量数据的统计处理结果直接关系到测量精度的提高,同时也与测量系统结构、被测物体特性及环境条件等因素有关。从激光三角法的测量机理出发,针对易拉罐罐盖开启口压痕残余厚度测量中影响测量的关键问题进行分析和研究,包括激光光点尺寸、激光散斑、精细结构、被测物体表面的光泽、颜色等。
随着现代工业的不断发展,对各种罐盖容器表面微小刻痕测量的质量要求越来越高,根据原理的不同,可分为接触式测量和非接触式测量。接触式测量方法发展比较成熟,但有其局限性。非接触测量是罐盖容器测量的发展方向,其中的光学非接触测量法是一个非常活跃的研究领域。目前常见的非接触光学测头有:激光三角法测头、激光聚焦测头、光栅测头等。相对其他测量方法而言,激光三角法测量系统在物体形貌检测以及物体体积测量当中得到广泛的应用,它具有大的偏置距离和大的测量范围,对待测表面要求较低,不仅适合小件物体的轮廓测量,也非常适合大型物体的形貌体积测量,而且测量系统的结构非常简单,维护非常方便,是一种高速、高效、高精度、具有广阔应用前景的非接触测量方法。 激光位移传感器的精度高达亚微米级别,并且响应速度快,适用于高速运动物体的测量。新型位移传感器的精度
激光位移传感器的测量范围较窄,通常适用于小范围、高精度的测量。光电位移传感器免费咨询
在激光三角法的光学成像系统中,像点移动的位移是测量结果的依据,作为成像对象的激光斑点的尺寸对测量的精度有很大的影响。在一个衍射受限系统中,成像的焦深大小为:它是表征光斑能清晰地成像在探测器上的纵向范围,一定的焦深范围是激光三角测量传感器实现精密测量的前提条件。,当用激光三角法测量易拉罐罐盖开启口刻痕的残余厚度时,希望不仅能精确地探测出A部位,而且还能探测出B部位的细节。当激光光斑直径较大时,此时焦深也较大,虽然成像的纵向范围扩大了,激光测量的动态范围提高了,但是在探测B部位时,激光三角测量传感器探测的细节能力降低了,基本上没法探测出B部位的具体细节;当通过增大会聚物镜的数值孔径NA时,光斑的尺寸减小了,探测细节能力增强了,但是成像的焦深范围却大大减小了,也导致激光三角测量传感器不能可靠地探测。所以,利用激光三角法测量易拉盖开启口刻痕时,减小光斑尺寸与增大焦深范围是一对矛盾,它在一定程度上限制了激光三角法在易拉罐罐盖开启口刻痕测量中的使用。因此,在用激光三角法测量易拉罐罐盖开启口刻痕的残余厚度时,应合理设计光学系统,选择合适的激光光斑尺寸。光电位移传感器免费咨询