
序列图像的差异通常是运动目标检测和跟踪的出发点,认为目标的运动是图像差异的根本原因。但是,这是建立在背景本身不运动的前提下的。因此,在许多跟踪系统中,比如车载,由于车的振动导致传感器位置的变化,表现在图像上就是背景的运动,因此在做差图像和背景自动更新之前,都必须先经过配准,即让所有图像在都同一个坐标...
目标跟踪基本参数
- 品牌
- 慧视科技
- 型号
- 可咨询
- 输出信号
- 数字型,定制
- 制作工艺
- 集成,薄膜,陶瓷,可定制
- 材质
- 可定制
- 材料物理性质
- 导体,磁性材料,定制
- 材料晶体结构
- 定制
- 加工定制
- 是
目标跟踪企业商机
智能交通控制是“智慧城市”的关键内容之一。在城市的主干道,尤其是十字路口,对车辆、行人等目标的自动检测与跟踪是智能交通系统的重要任务,而基于深度学习的目标跟踪技术在其中起着重要作用,借助于云平台,能够及时有效地实现对交通状态的感知,从而提高整个城市的交通效能。成都慧视光电技术有限公司专注于图像处理领域,在人工智能算法、激光雷达、红外图像处理、目标识别与追踪、窄带传输等方面积累了丰富的经验和成果。研发团队由行业沉淀了十余载的人员组成,并与南京大学、电子科技大学等学府实验室达成深度合作,公司致力于成为基于图像的智能方案提供商。跟踪板卡的定制哪家比较好?福建目标跟踪工程
目标跟踪
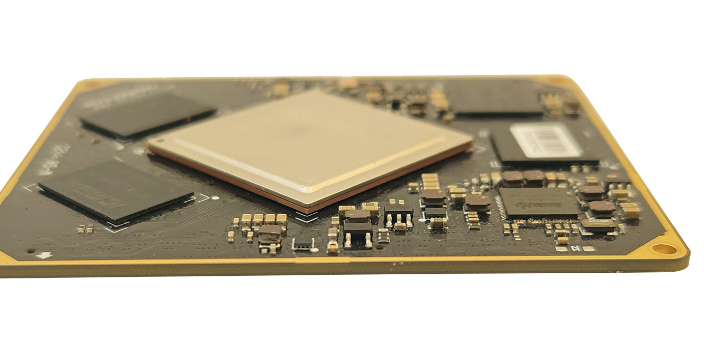
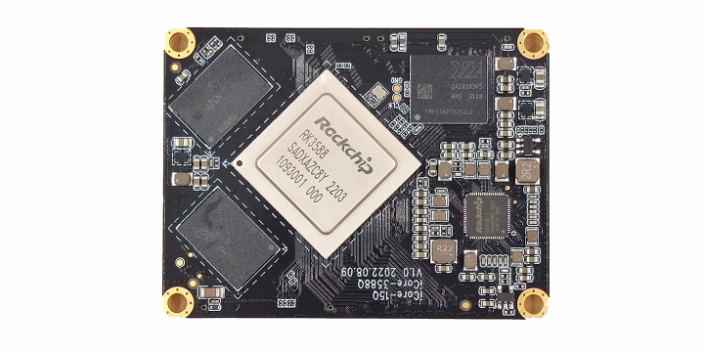
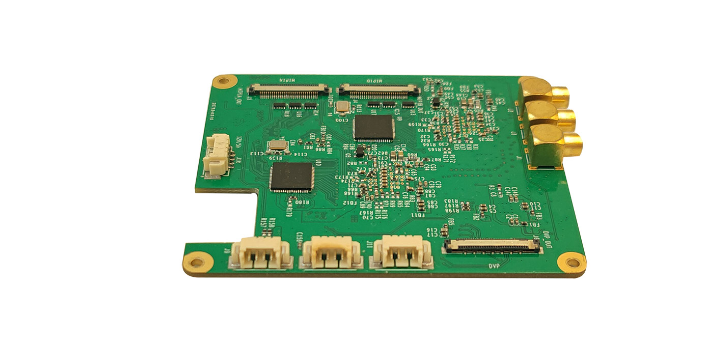
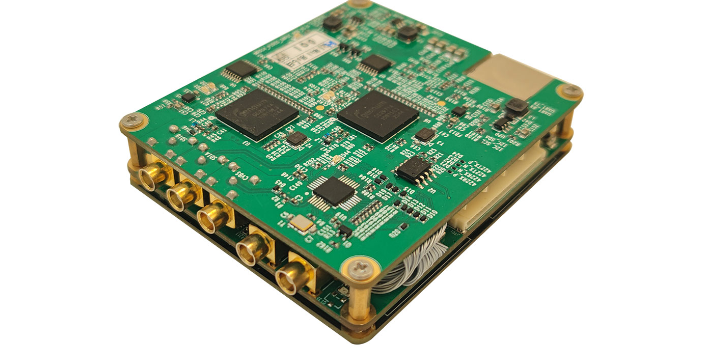
成都慧视光电技术有限公司的RK3588图像处理板同之前的RK3399pro图像处理板对比:CPU方面:3588CPU架构更先进,核心数8核(4大4小),rk3399pro只有6核(2大4小);NPU方面:rk3399pro算力3.0TOPS,rk3588算力6.0TOPS。(算力是NPU的一种评估方法,算力越高,检测帧率越高);视频输入输出接口方面:RK3399PRO支持2组MIPI-CSI输入,1组HDMI、1组MIPI-DSI输出RK3588支持1组HDMI、2组MIPI-CSI、1组DVP输入,2组HDMI、2组MIPI、1组BT1120输出;视频编解码器方面:rk3399pro支持H264,不支持H265,rk3588支持H264、H265,系统上:rk3399pro不支持RT实时系统,RK3588支持RT实时系统。浙江多系统适配目标跟踪RK3588作为慧视光电开发的全国产化工业级板卡,具备高性能、高精度的优点。

AI中台作为智慧城市及城市空间管理的引擎和大脑,可更好的提升城市中数据的价值、提升城市运行效率、有效推进数字化城市空间管理进程、提升城市品质。商业层面,AI中台作为基础平台架构,可有效提升城市空间管理应用的开发速率与运行效果。随着未来AI中台的逐步扩张,可满足城市空间管理的应用需求,抬高市场天花板,为商业进入者提供巨大的增量市场空间。AI中台赋能城市空间管理过程中,相比于之前的技术手段,在可复用性、预测性、创新性和对接数据平台等方面都更有优势,这是AI和中台相叠加后将两者优势结合的结果。更有效地满足城市空间管理者对数据充分挖掘、数据高效利用、各部门职能协同的迫切需求。
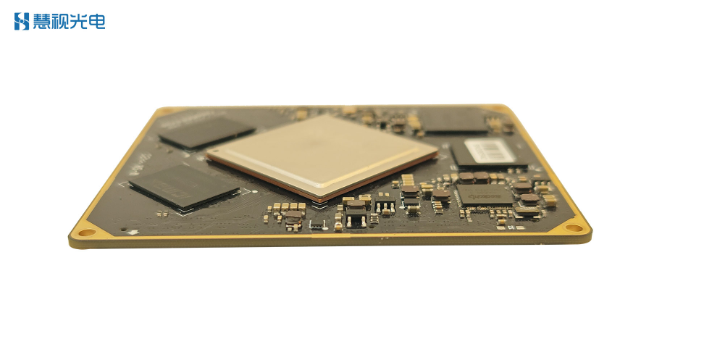
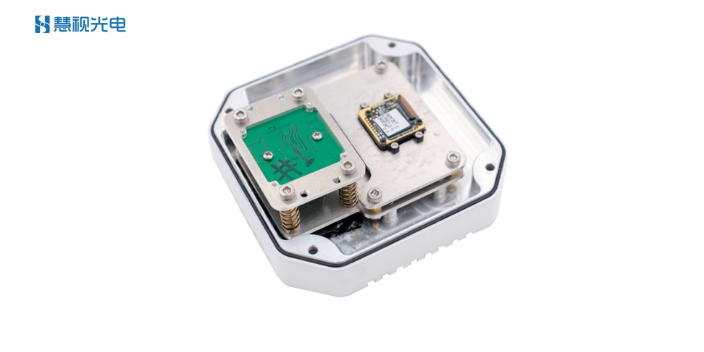
成都慧视光电技术有限公司的RK3588图像处理板是采用国内AI智能芯片基础上自主研发的智能算法图像处理板,植入其自主研发的智能图像算法,基于输入的可见光或者红外的视频流,可实时对目标进行自主检测、识别或者手动锁定,同时可以根据输出目标的靶量信息,对目标进行实时跟踪。支持二次开发,方便客户快速集成。慧眼智能图像处理板是慧视光电在国内AI智能芯片基础上,自主研发的具有智能图像算法的处理板,可实时实现对目标的自主检测、识别、跟踪或者人为的锁定、跟踪,是目前国内少数能够提供稳定成熟的国产化智能图像处理平台的单位之一。慧视微型双光吊舱能够实现昼夜成像。

提到AI智能图像算法,自然而然会想到人工智能。人工智能萌芽期可以追溯到十七世纪,当时的巴斯卡和莱布尼茨萌生了智能机器的想法。到了十九世纪英国的数学家布尔和德国的摩尔根提出了思维定律可以称为人工智能的开端。十九世纪二十年代,英国科学家巴贝奇设计的“计算机器”,被认为是计算机硬件,也就是人工智能硬件的前身。电子计算机的发明,是人工智能称为可能。因为一战、二战原因,人工智能暂时处于了停滞期,到了20世纪60年代末,人工智能又迎来了新研究高潮,到了80年代90年代,人工智能进入发展的快车道,到了二十一世纪,人工智能取得了长足的进步,让我们的生产、生活方式产生了巨大的变化。慧视AI板卡能够凸显AI的智慧之能,变被动为主动,提供多种能主动预警的视频分析和人脸识别黑白名单管理。青海目标跟踪检测
慧视光电开发的慧视AI图像处理板,采用了国产高性能CPU。福建目标跟踪工程
传统的监控系统需要依靠人对得到的监控视频进行分析,耗时耗力。智能监控系统可以通过目标跟踪、识别等技术自动实现对目标场景的分析和异常检测。随着深度学习在计算机视觉领域的快速发展,智能视频分析技术已经成为安防企业竞争的关键,相关技术已经达到非常高的精度。传统安防技术更多的是关注事后查证的有效性,但随着高清摄像机的普及,如何利用这些资源使设备“活”起来,已经成为越来越多安防企业发展的重点。有了视频分析,就可以及时发现视频中的异常情况,从而及时做出反应,减少损失。福建目标跟踪工程
与目标跟踪相关的文章

宁夏目标跟踪好选择
- 工业目标跟踪解决 2025-12-22
- 江西数据目标跟踪 2025-12-22
- 目标跟踪多少钱 2025-12-21
- 贵州什么目标跟踪 2025-12-21
- 比较好的目标跟踪有哪些 2025-12-21
- 山东目标跟踪多少钱 2025-12-21
- 数据目标跟踪解决 2025-12-21
- 广东质量目标跟踪 2025-12-21
- 湖北目标跟踪参考价格 2025-12-21
- 安徽专业目标跟踪 2025-12-21
- 吉林目标跟踪推荐厂家 2025-12-21
- 数据目标跟踪 2025-12-21
与目标跟踪相关的产品



与目标跟踪相关的新闻
-
吉林目标跟踪经验丰富 2025-12-20 15:01:33我们要追踪的目标可以是各式各样,可能是人类,例如街上的行人、场上的运动员等等,也可以是汽车、飞机、船舶,甚至可以是显微镜下的细胞。虽然对象不尽相同,但是我们都有同一个目的,那就是想要确定这些目标的位置,去向和其他感兴趣的特征等等,这就是多目标追踪。研究多目标追踪的历史,会发现首先是在二战时用作对敌机...
-
新疆目标跟踪市场报价 2025-12-20 04:01:55之所以能产生这种可见运动或表观运动,是因为物体以不同的速度在不同的方向上移动,或者是因为相机在移动(或者两者都有)在很多应用程序中,跟踪表观运动都是极其重要的。它可用来追踪运动中的物体,以测定它们的速度、判断它们的目的地。对于手持摄像机拍摄的视频,可以用这种方法消除抖动或减小抖动幅度,使视频更加平稳...
-
耐用目标跟踪 2025-12-20 06:01:42腾讯开发的机器人小五,采用轮、腿、足复合设计,使得它具备越障能力的同时,也保持了轮式机器人的运行效率。每条腿都可以单独伸长缩短,能有效提升承载能力。装上了双编码器大扭矩密度的执行器后,就能承受住一般成年人的重量。将机器人用于养老服务领域,能够帮老人取快递,抱老人起床,带老人进行活动。机器人内置RGB...
-
安全目标跟踪好选择 2025-12-20 11:01:26安全生产一直是发展过程中不变的话题。当前,我国建筑行业正处于高速发展阶段,不少建筑工地陆续开工,建筑行业安全也越发受到社会各界的关注。该行业以事故高发、危险系数高而闻名,建筑工人常常暴露于高处坠落、电气和化学危险以及涉及重型机械和车辆的环境中。一般情况下,工地开工都会对工人进行安全教育培训,并且设有...
与目标跟踪相关的问题
新闻资讯
产品推荐
-
***时省力目标识别供应商
2025-12-28 -

吉林自主可控图像标注有哪些
2025-12-28 -
重庆哪里有目标识别联系方式
2025-12-28 -
智能化目标识别郑重承诺
2025-12-28 -
云南如何目标识别编号
2025-12-28 -
海南快速目标识别定制
2025-12-28 -
湖南智能化目标识别经验丰富
2025-12-28 -
四川低压线目标识别办公软件
2025-12-28 -
广东视频目标识别定制
2025-12-28