激光位移传感器在手机组装行业中也有着广泛的应用。在手机制造过程中,需要对各个组件进行精确的测量,以确保其质量和可靠性。其中,激光位移传感器可以应用于段差测量。通过将激光发射光束投射到被测组件表面,利用漫反射效应接收反射光并将光信号转换为电信号输出,从而获取被测组件的位移信息。通过使用激光位移传感器进行段差测量,可以快速、准确地检测出组件间的差异,从而提高手机制造过程的效率和质量。此外,激光位移传感器还可以应用于手机外观检测、液晶屏组装等领域,为手机制造过程提供准确、可靠的测量数据。为了优化激光位移传感器在手机组装后的段差测量等行业应用,需要进一步提高其测量精度和稳定性。在制造过程中,激光位移传感器可能会受到环境因素的影响,如温度、湿度等,这可能会影响测量结果的准确性。因此,需要对激光位移传感器进行精确定标和校正,以确保其测量结果的准确性和可靠性。在实际应用中,还应根据具体需求选择合适的激光位移传感器型号和参数,以满足不同应用场景的测量需求。激光位移传感器可以实现物体的倾斜度、线性位移、角度、振动等参数的精确测量。智能位移传感器使用误区

回复 吴佳如: “随后安装在贴装台单元上的激光位移传感器403检测键合头370上拾取的芯片的倾角,结合两位移传感器360和403的初始角度差值,利用调平机构340对芯片做出与贴装台401上贴装位间的平行调整;其调平的具体实现过程如下:音圈电机343动作,从而实现音圈模组341产生平行于电机轴向的位移,继而导致下方动平台342产生绕u轴或者v轴(与u轴垂直)方向的转动,从而实现动平台342倾角的调整,使得连接在动平台上的键合头370与贴装台401上基板贴装位平行,保证键合压力均匀;”扩展在贴装过程中,如果芯片的倾角不正确,将会影响键合头和芯片之间的键合精度和贴装质量。因此,需要使用激光位移传感器对芯片的倾角进行检测,并使用调平机构对其进行调整。具体实现过程是,将激光位移传感器403安装在键合头370上拾取的芯片上,通过结合两个位移传感器360和403的初始角度差值,可以确定芯片的倾角。然后,利用调平机构340对芯片进行平行调整,使芯片倾角与贴装台401上的贴装位平行。位移传感器安装操作注意事项不同品牌和型号的激光位移传感器在精度、测量范围、分辨率、抗干扰能力等方面有所不同。

此外,光斑尺寸还会受到激光束的发散角度、被测物体表面的反射率等因素的影响。为了减小这些因素对光斑尺寸的影响,可以采用一些方法进行优化。例如,可以采用透镜或棱镜对激光束进行聚焦和调整,以控制光斑尺寸和形状。此外,还可以采用适当的激光波长和功率,并合理选择被测物体表面的涂层材料,以提高测量精度和可靠性。在实际应用中,需要根据具体的测量场景和要求选择适当的光斑尺寸和激光位移传感器型号,以满足不同精度要求的测量需求。同时,在使用过程中需要注意对激光位移传感器的保养和维护,以保证其长期稳定的工作性能。
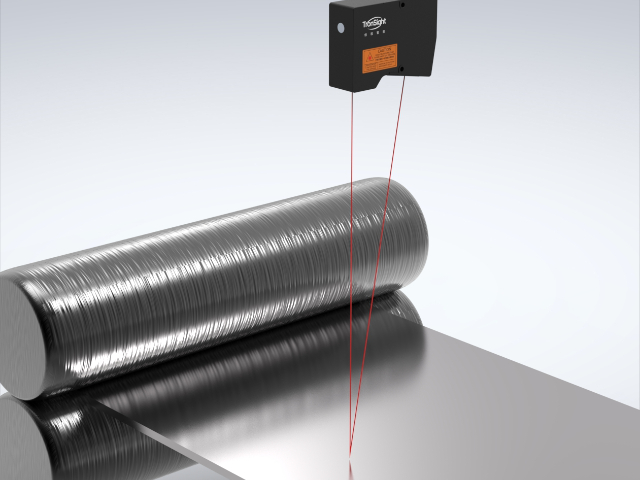
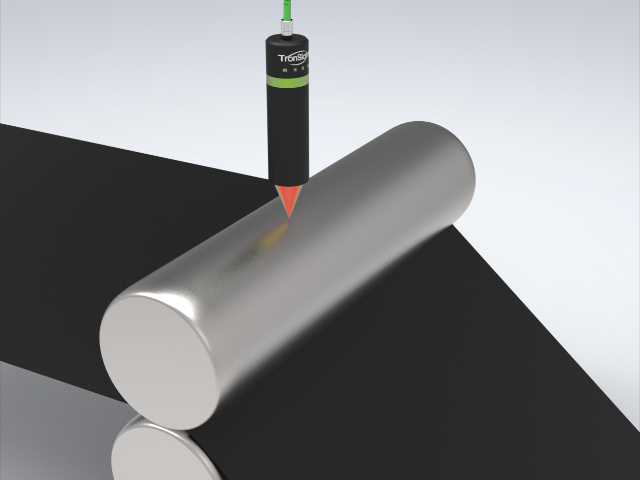
激光位移传感器是一种利用激光发射光束投射到被测物体表面,接收反射光并将光信号转换为电信号输出的原理进行测量的传感器。它根据激光源发射光束的不同,可分为点激光位移传感器和线激光位移传感器两种。其中,点激光位移传感器在一个采样周期内只能获得被测量的一维信息,通常依托于三坐标测量机或三坐标机床等设备来获取被测物体的三维信息。激光位移传感器具有结构紧凑、测量速度快、精度高、测量光斑小和非接触式的测量特点,因此被广泛应用于工业自动化、机器人技术和精密测量等领域。激光位移传感器是一种高精度、高分辨率的测量仪器,基于激光干涉原理进行测量。

在激光三角法的光学成像系统中,像点移动的位移是测量结果的依据,作为成像对象的激光斑点的尺寸对测量的精度有很大的影响。在一个衍射受限系统中,成像的焦深大小为:它是表征光斑能清晰地成像在探测器上的纵向范围,一定的焦深范围是激光三角测量传感器实现精密测量的前提条件。,当用激光三角法测量易拉罐罐盖开启口刻痕的残余厚度时,希望不仅能精确地探测出A部位,而且还能探测出B部位的细节。当激光光斑直径较大时,此时焦深也较大,虽然成像的纵向范围扩大了,激光测量的动态范围提高了,但是在探测B部位时,激光三角测量传感器探测的细节能力降低了,基本上没法探测出B部位的具体细节;当通过增大会聚物镜的数值孔径NA时,光斑的尺寸减小了,探测细节能力增强了,但是成像的焦深范围却大大减小了,也导致激光三角测量传感器不能可靠地探测。所以,利用激光三角法测量易拉盖开启口刻痕时,减小光斑尺寸与增大焦深范围是一对矛盾,它在一定程度上限制了激光三角法在易拉罐罐盖开启口刻痕测量中的使用。因此,在用激光三角法测量易拉罐罐盖开启口刻痕的残余厚度时,应合理设计光学系统,选择合适的激光光斑尺寸。激光位移传感器可以通过无线或有线连接与计算机、控制器等设备进行数据传输和控制。有哪些位移传感器找哪家
不同品牌和型号的激光位移传感器在性能、价格、适用场景等方面存在差异。智能位移传感器使用误区
采用激光三角法测量易拉罐罐盖开启口压痕的残余厚度时,要求不仅能测量生产线上易拉罐罐盖开启口刻痕的残余厚度,而且还要对易拉盖模具的磨损情况进行评估。此时,激光三角法的测量精度除了会受到散斑的影响外,还会受到精细结构对测量精度的影响。激光三角法测量的重要假定是发射光束始终与被测物体表面法线方向一致,约定被测表面上入射光点处的法线与入射光方向不重合时称被测表面发生了倾斜,其夹角称为倾斜角E53。当用激光束照射易拉盖的开启口刻痕的斜面和拐角时,被测物表面与入射光不是垂直的,即被测面发生了倾斜。此时,即便物光点的位移与垂直入射时相同,但由于被测面的倾斜改变了散射光的光场相对于接收透镜的空间分布,使得电荷耦合器件(CCD)上会聚光斑的光能质心的位置相对于垂直入射时发生了改变,因而CCD的输出不再与垂直入射式相同。在此情形下,若仍使用垂直入射时的标定曲线来确认位移,必然会产生误差。这就是精细结构对测量精度的主要影响。智能位移传感器使用误区