激光三角法测量不仅具有大的偏置距离和大的测量范围,而且测量系统结构相对简单,维护方便,可有效应用于三维曲面的非接触精密测量中;但同时由于其测量精度与被测物体表面结构、特性及环境条件等因素有关,当激光三角法应用于易拉罐罐盖开启口压痕残余厚度测量时,要求测量精度达到1μm,从上面的分析可以看到,由于激光光点尺寸、激光散斑和精细结构对测量精度的影响,导致激光三角法测量结果失去实际的参考价值。所以为了提高测量精度,必须针对罐盖微小刻痕的具体结构选用适当的激光尺寸、尽可能抑制激光散斑及环境因素对测量精度的影响。不同品牌和型号的激光位移传感器在精度、测量范围、分辨率、抗干扰能力等方面有所不同。原装位移传感器精度

智能车系统以飞思卡尔16位单片机MC9S12XSl28为重要管控器,该款处理器标称40MHz总线频率,片内集成128KB的FLASH,8KB的RAM,集成8信道脉宽调制模块(PWM),10位模/数转换器(ADC),周期性中断定时器(PIT),增强型捕捉定时器(ECT)以及SCI、SP|等多种通信接口,工作温度范围大,为n]一40~125℃,管控器性能优越,能够满足本设计的需求。智能车系统主要包括单片机樶小系统、路径识别模块(激光传感器阵列)、舵机管控模块,电机驱动模块、测速模块、电源管理模块等,硬件总体设计方案如图】所示。其中MC9S12XSl28管控器是智能车的重要部件,负责接收激光传感器阵列获取的路径信息、小车速度、拨码开关等输入信息,进行数据处理后依据管控策略,输出相应管控量对舵机和直流驱动电机进行管控,完成智能车的转向、前进、减速等功能。高采样速率位移传感器常见问题激光位移传感器是一种高精度、高分辨率的测量仪器。

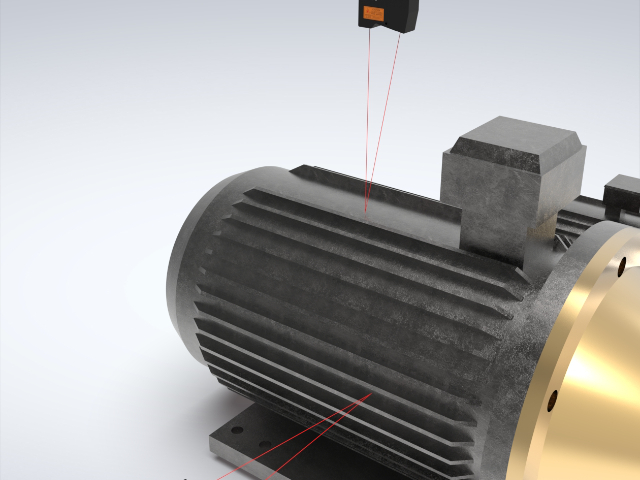
激光位移传感器是一种利用光学三角法原理进行非接触式测量的传感器。它通过将激光发射光束投射到被测物体表面,接收反射光并将光信号转换为电信号输出,从而获取被测物体空间位置信息。激光位移传感器具有结构小巧、测量速度快、精度高、测量光斑小、抗干扰能力强等特点,并广泛应用于微位移测量领域。它可以与计算机及应用软件配合实现测量数据实时处理,为工业生产制定相关决策提供帮助。目前国内所使用的激光非接触测量仪器主要依靠国外进口。
采用激光三角法测量易拉罐罐盖开启口压痕的残余厚度时,要求不仅能测量生产线上易拉罐罐盖开启口刻痕的残余厚度,而且还要对易拉盖模具的磨损情况进行评估。此时,激光三角法的测量精度除了会受到散斑的影响外,还会受到精细结构对测量精度的影响。激光三角法测量的重要假定是发射光束始终与被测物体表面法线方向一致,约定被测表面上入射光点处的法线与入射光方向不重合时称被测表面发生了倾斜,其夹角称为倾斜角E53。当用激光束照射易拉盖的开启口刻痕的斜面和拐角时,被测物表面与入射光不是垂直的,即被测面发生了倾斜。此时,即便物光点的位移与垂直入射时相同,但由于被测面的倾斜改变了散射光的光场相对于接收透镜的空间分布,使得电荷耦合器件(CCD)上会聚光斑的光能质心的位置相对于垂直入射时发生了改变,因而CCD的输出不再与垂直入射式相同。在此情形下,若仍使用垂直入射时的标定曲线来确认位移,必然会产生误差。这就是精细结构对测量精度的主要影响。激光位移传感器可以实现非接触式测量,对物体不会产生实际接触,避免对其造成损伤或污染。

智能车技术涵盖了车辆工程、传感器、人工智能、自动管控、汽车电子、计算机等多个学科领域[13,智能车的研究在智能交通领域已成为研究热点。飞思号尔智能汽车竞赛要求参赛车模沿着任意给定的黑色带状路径,通过管控转向和车速,在稳定的前提下以较快的速度完成自主寻径¨j。本文以此为背景,设计了基于MC9S12XSl28微管控器的智能车系统,采用激光传感器阵列识别路径信息,得到智能车中心线与路径中轴线韵横向偏差.采用比例管控算法管控舵机转向,并对直流驱动电机进行增量式PID闭环调节管控,从而实现智能模型车快速稳定地自主寻径行驶。不同型号的激光位移传感器在精度、测量频率、成本等方面存在差异,需要根据实际需求进行选择。智能位移传感器成本价
不同品牌和型号的激光位移传感器在性能、价格、适用场景等方面存在差异。原装位移传感器精度
激光三角法原理激光三角法原理框图如图所示,由光源发出的一束激光照射在待测物体平面上,通过反射之后在检测器上成像。当物体表面的位置发生改变时,其所成的像在检测器上也发生相应的位移。通过像移和实际位移之间的关系式,真实的物位移可以由对像移的检测和计算得到,计算公式为:
x=ax'/(bsinθ-x'cosθ)(1)
式中:x,x'分别是被测物位移和光敏器件上像斑的位移;a,b,θ是系统的结构参数,是根据具体使用要求而选定的。由此可见精确地测量X7就可以得到被测物体的位移量,这就是激光三角法测量位移的原理。 原装位移传感器精度