激光三角法测量原理可有效应用于三维曲面的非接触精密测量,测量数据的统计处理结果直接关系到测量精度的提高,同时也与测量系统结构、被测物体特性及环境条件等因素有关。从激光三角法的测量机理出发,针对易拉罐罐盖开启口压痕残余厚度测量中影响测量的关键问题进行分析和研究,包括激光光点尺寸、激光散斑、精细结构、被测物体表面的光泽、颜色等。
随着现代工业的不断发展,对各种罐盖容器表面微小刻痕测量的质量要求越来越高,根据原理的不同,可分为接触式测量和非接触式测量。接触式测量方法发展比较成熟,但有其局限性。非接触测量是罐盖容器测量的发展方向,其中的光学非接触测量法是一个非常活跃的研究领域。目前常见的非接触光学测头有:激光三角法测头、激光聚焦测头、光栅测头等。相对其他测量方法而言,激光三角法测量系统在物体形貌检测以及物体体积测量当中得到广泛的应用,它具有大的偏置距离和大的测量范围,对待测表面要求较低,不仅适合小件物体的轮廓测量,也非常适合大型物体的形貌体积测量,而且测量系统的结构非常简单,维护非常方便,是一种高速、高效、高精度、具有广阔应用前景的非接触测量方法。 激光位移传感器的测量范围较窄,通常适用于小范围、高精度的测量。推荐位移传感器使用误区

随着城市化进程的加快和人口的增加,轨道交通已经成为城市中不可或缺的一部分。轨道交通的安全和运营对于现代城市的运转至关重要。而激光位移传感器的高精度和高灵敏度使其在轨道交通领域得到了广泛应用,它能够快速准确地测量列车的位置和运动状态,为轨道交通的安全和运营提供了支持。在轨道交通领域,激光位移传感器主要被应用于列车的运行状态监测和控制。列车的位置和运动状态是轨道交通运营管理的重要指标,因此需要采用高精度的测量技术进行监测。它能够实现微小位移的测量,可以实时地监测列车的位置和运动状态,并且能够在列车高速行驶时提供快速的响应速度。其还可用于列车轮对的动态测量,以检测轮对的磨损和偏差,从而及时发现问题并进行维修。此外,激光位移传感器还可以用于列车的自动导向系统,通过实时测量列车的位置和运动状态来控制车辆的行驶方向和速度,从而提高列车的安全性和运行效率。总之,激光位移传感器在轨道交通领域的应用,为列车的运行状态监测和控制提供了高精度、高灵敏度的测量手段,为轨道交通的安全和运营提供了重要的支持。未来随着技术的不断发展和应用场景的扩大,激光位移传感器在轨道交通领域的应用前景将更加广阔。高精度位移传感器定做价格不同的应用场景需要选择不同类型的激光位移传感器,以满足测量要求。

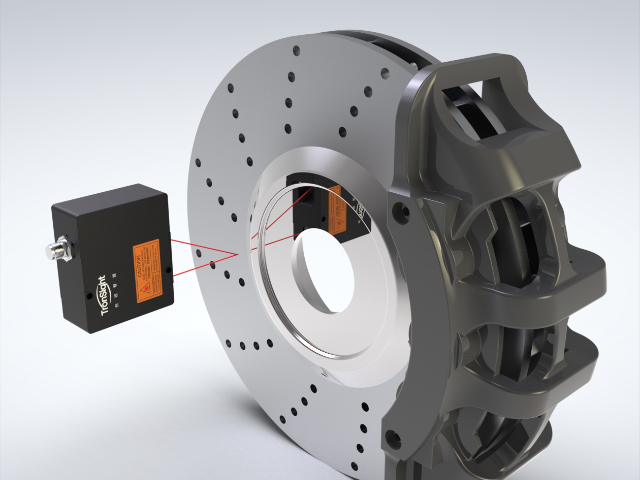
用CMM来测量同轴度是一种不错的选择,但当采样点数庞大时,CMM测量费时。当被测孑L表面到传感器的距离,以及被测孔的高度在传感器测量范围内时,二维激光位移传感器法适合此类孔的同轴度测量。二维激光位移传感器采用线扫描,具有采集数据点快的优势,但用激光位移传感器时需要特殊器具固定,需转动工件或传感器进行孔表面数据采集。本文的实验对象是车桥减速器,其两端轴承孔的直径为180mm,上偏差为o.026mm,下偏差为O.014mm,左边孑L为基准孔,右边孔相对于左边孔的同轴度要求为西o.05mm。本文提出一种基于激光位移传感器检测减速器同轴度的方法,设计了一种实验装置,对采集到的实验数据进行解析,对数据处理算法进行详细说明,利用高斯一牛顿小二乘迭代法求出两端轴承孔轴线以及公共轴线,进而实现同轴度的计算,为减速器同轴度的检测提供一种思路。本实验具有测量速度快、检测精度高、测量便捷等优势。
现在的电子设备需要更高效、更小、更快的PCB板,而这些板必须通过使用高度集成的组件变得更加强大。为了确保这些组件在正确的位置上连接,需要使用高精度的测量系统来检测它们的位置。这对传感器提出了一系列挑战,包括需要小的光斑焦点直径、高测量速度和高测量精度。使用非接触高精度的激光位移传感器可以满足这些要求,它们可以检测PCB板和高度集成的组件的位置,以确保它们在正确的高度位置和水平位置上连接。这些传感器可以应用于医疗设备、智能手机和机床等各种电子设备的制造中。激光位移传感器具有响应速度快、精度高、不受磁场、温度影响等优点。

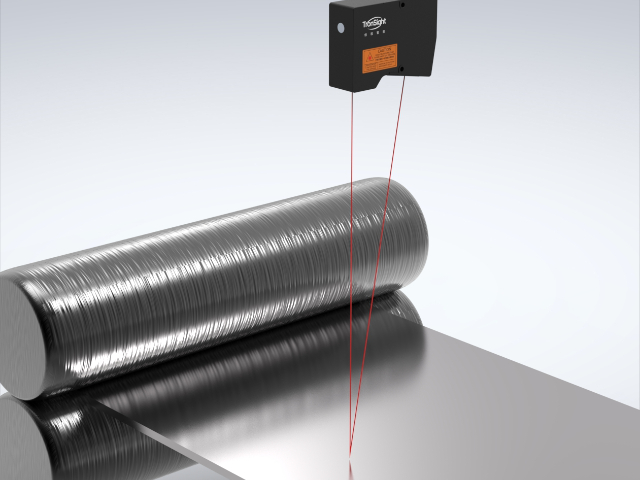
二维激光位移传感器是一种用于测量物件位移大小及对动态物件位移量进行实时测量的光、机、电一体化系统口]。高精度的二维激光传感器采用的是激光三角反射式原理,采集不同材质表面的二维轮廓信息,通过特殊的透镜组,激光束被放大形成一条静态激光线投射到被测物体表面上。激光线在被测物体表面形成漫反射,反射光透过高质量光学系统,被投射到敏感感光矩阵上。除了传感器到被测表面的距离信息(Z轴),控制器还可以通过图像信息计算得出沿着激光线的位置信息(x轴)。二维激光位移传感器测量输出一组二维坐标值,可通过转动被测物体或轮廓仪探头得到一组三维测量值。本文的目标是利用二维激光位移传感器,通过传感器绕转轴的旋转,线扫描圆柱孔内表面来实现圆柱孔内表面信息的测量,进而求得同轴度。如图3所示,二维激光位移传感器有X轴小、大量程,以及Z轴小、大量程。用传感器测量减速器两端轴承孑L内表面信息时,需保证传感器到孔内表面的距离在传感器的Z轴测量范围内,并且对应着该Z轴测量量程的X轴测量范围应大于孔的高度,即激光线旋转一周应能包含轴承孑L内表面。选择合适的激光位移传感器需要考虑精度、灵敏度、分辨率、响应速度以及测量范围等因素。国产位移传感器企业
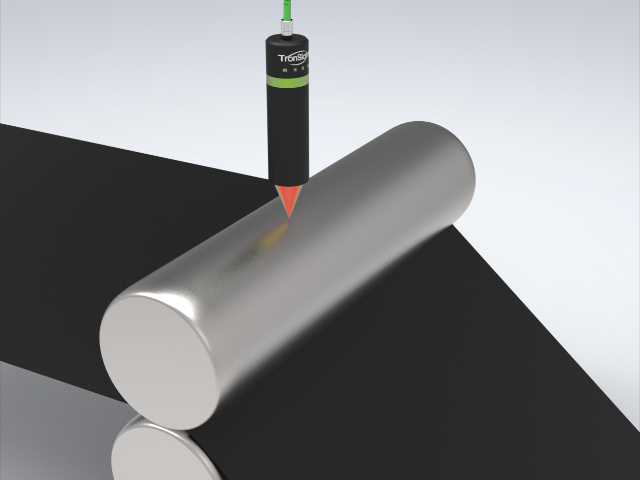
激光位移传感器利用激光束进行测量,能够测量微小的变化,精度高达纳米级。推荐位移传感器使用误区
激光三角法测量不仅具有大的偏置距离和大的测量范围,而且测量系统结构相对简单,维护方便,可有效应用于三维曲面的非接触精密测量中;但同时由于其测量精度与被测物体表面结构、特性及环境条件等因素有关,当激光三角法应用于易拉罐罐盖开启口压痕残余厚度测量时,要求测量精度达到1μm,从上面的分析可以看到,由于激光光点尺寸、激光散斑和精细结构对测量精度的影响,导致激光三角法测量结果失去实际的参考价值。所以为了提高测量精度,必须针对罐盖微小刻痕的具体结构选用适当的激光尺寸、尽可能抑制激光散斑及环境因素对测量精度的影响。推荐位移传感器使用误区