- 品牌
- 朗而美
- 型号
- V1
- 自动化程度
- 自动
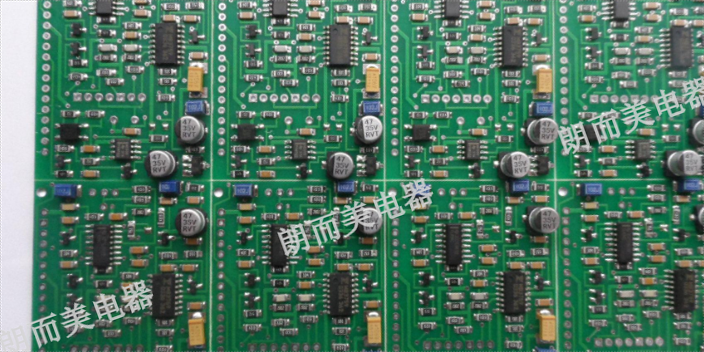
一、PCBA、SMT、PCB是什么?1、PCB中文名称有电路板、线路板、印制电路板等几种称呼,PCB是用来支撑电子元器件,并提供线路,使电子元器件之间可以形成一个完整的电路。2、SMT是目前流行的一种工艺技术,通过一道道工序将电子元器件贴装在PCB空板上,又称表面贴装技术。3、PCBA是指经过原材料采购,然后在进行SMT贴片,DIP插件,测试以及成品组装等一站式服务的加工制程。上海朗而美电器有限公司PCBA、SMT、PCB加工/代加工,欢迎咨询。smt贴片机的工作流程是什么?湖北PCB贴片加工厂商

表面贴装技术(SurfacdMountingTechnolegy简称SMT)是新一代电子组装技术,它将传统的电子元器件压缩成为体积只有几十分之一的器件,从而实现了电子产品组装的高密度、高可靠、小型化、低成本,以及生产的自动化。这种小型化的元器件称为:SMY器件(或称SMC、片式器件)。将元件装配到印刷(或其它基板)上的工艺方法称为SMT工艺。相关的组装设备则称为SMT设备。目前,先进的电子产品,特别是在计算机及通讯类电子产品,已普遍采用SMT技术。国际上SMD器件产量逐年上升,而传统器件产量逐年下降,因此随着进间的推移,SMT技术将越来越普及。湖北PCB贴片加工厂商目前计算机主板上常被使用之BGA球径为0.76mm。
PCBA加工焊接要求:1、插装元件在焊接面引脚高度1.5~2.0mm。贴片元件应平贴板面,焊点光滑无毛刺、略呈弧状,焊锡应超过焊端高度的2/3,但不应超过焊端高度。少锡、焊点呈球状或焊锡覆盖贴片均为不良;2、焊点高度:焊锡爬附引脚高度单面板不小于1mm,双面板不小于0.5mm且需透锡。3、焊点形状:呈圆锥状且布满整个焊盘。4、焊点表面:光滑、明亮,无黑斑、助焊剂等杂物,无尖刺、凹坑、气孔、露铜等缺陷。5、焊点强度:与焊盘及引脚充分润湿,无虚焊、假焊。6、焊点截面:元件剪脚尽可能不剪到焊锡部分,在引脚与焊锡的接触面上无裂锡现象。在截面处无尖刺、倒钩。7、针座焊接:针座要求底部贴板插装,且位置端正,方向正确,针座焊接后,底部浮高不超过0.5mm,座体歪斜不超出丝印框。成排的针座还应保持整齐,不允许前后错位或高低不平
PCBA加工工艺十分复杂,基本要经历近50道工序,从电路板制程、元器件采购与检验、SMT贴片组装、DIP插件、PCBA测试、程序烧制、包装等重要过程。其中,电路板制程拥有20~30道工序,程序极为复杂。一、电路板加工工艺及设备电路板设备包含电镀线、沉铜线、DES线、SES线、清洗机、OSP线、沉镍金线、压机、曝光机、烤箱、AOI、板翘整平机、磨边机、开料机、真空包装机、锣机、钻机、空压机、喷锡机、CMI系列、光绘机等。路板按照导体图形的层数可以分为单面、双面和多层印制板。随着三十年的发展之后,贴片机由低速、低精度慢慢发展到现在的高速、高精度。
PCBA、SMT、PCB三者之间的区别1、PCB又称电路板,是SMT加工时必备的原材料,只是一个半成品。2、SMT是一种电路板组装技术,通过把PCB基板买回来,通过技术把元器件贴装再PCB上,是目前*流行的工艺技术。3、PCBA则是在SMT的基础上进行完善的一种的加工服务,增加了元器件的采购,和后面的测试和成品组装环节,是为客户提供一条龙服务的服务模式,是未来发展的方向。一个电子产品的加工完成,它们的顺序应该是这样的PCB→SMT→PCBA,PCB的生产是非常复杂的,SMT则相对简单,PCBA讲究的是一站式服务。贴片机的原理又是做什么的?湖北电动贴片加工流程
SMT基本工艺构成要素包括:丝印(或点胶),贴装(固化),回流焊接,清洗,检测,返修。湖北PCB贴片加工厂商
3、贴装:其作用是将表面组装元器件准确安装到PCB的固定位置上。所用设备为贴片机,位于SMT生产线中丝印机的后面。4、固化:其作用是将贴片胶融化,从而使表面组装元器件与PCB板牢固粘接在一起。所用设备为固化炉,位于SMT生产线中贴片机的后面。5、回流焊接:其作用是将焊膏融化,使表面组装元器件与PCB板牢固粘接在一起。所用设备为回流焊炉,位于SMT生产线中贴片机的后面。6、清洗:其作用是将组装好的PCB板上面的对人体有害的焊接残留物如助焊剂等除去。所用设备为清洗机,位置可以不固定,可以在线,也可不在线。7、检测:其作用是对组装好的PCB板进行焊接质量和装配质量的检测。所用设备有放大镜、显微镜、在线测试仪(ICT)、fei针测试仪、自动光学检测(AOI)、X-RAY检测系统、功能测试仪等。位置根据检测的需要,可以配置在生产线合适的地方。8、返修:其作用是对检测出现故障的PCB板进行返工。所用工具为烙铁、返修工作站等。配置在生产线中任意位置。湖北PCB贴片加工厂商
1、激光识别、X/Y坐标系统调整位置、吸嘴旋转调整方向,这种方法可实现飞行过程中的识别,但不能用于球栅列陈元件BGA。2、相机识别、X/Y坐标系统调整位置、吸嘴旋转调整方向,一般相机固定,贴片头飞行划过相机上空,进行成像识别,比激光识别耽误一点时间,但可识别任何元件,也有实现飞行过程中的识别的相机识别系统,机械结构方面有其它xi牲。这种形式由于贴片头来回移动的距离长,所以速度受到限制。现在一般采用多个真空吸料嘴同时取料(多达上十个)和采用双梁系统来提高速度,即一个梁上的贴片头在取料的同时,另一个梁上的贴片头贴放元件,速度几乎比单梁系统快一倍。但是实际应用中,同时取料的条件较难达到,而且不同类型...
- 山西哪里有SMT贴片加工定制厂家 2024-11-24
- 山东哪里有SMT贴片加工定制 2024-11-24
- 福建电动贴片加工定制厂家 2024-11-24
- 上海哪里有电子贴片加工组装 2024-11-24
- 山西PCB贴片加工厂家 2024-11-24
- 山西SMT贴片加工公司 2024-11-24
- 上海PCB贴片加工定制厂家 2024-11-23
- 北京PCB贴片加工流程 2024-11-23
- 江苏PCB贴片加工定制 2024-11-23
- 广东贴片加工定制厂家 2024-11-23

- 天津哪里有SMT贴片加工厂家 2024-03-16
- 山东哪里有SMT贴片加工供应商 2024-03-15
- 江西贴片加工厂商 2024-03-15
- 重庆贴片加工厂商 2024-03-15
- 山东SMT贴片加工公司 2024-03-14
- 广东哪里有电子贴片加工 2024-03-14




- 甘肃附近灯条批发 02-27
- 云南灯条灯带批发厂家 02-27
- 山西防水灯条批发厂家 02-27
- 湖北LED灯条供应商 02-27
- 山东灯条灯带批发供应商 02-27
- 贵州LED照明灯条厂家 02-27
- 河北LED防水灯条灯带批发厂家 02-27
- 黑龙江LED照明灯条批发供应商 02-27
- 青海防水灯条采灯带购供应商 02-27
- 内蒙古防水灯条灯带价格 02-27