- 品牌
- 上海洲和
- 型号
- IP65
- 加工定制
- 是
- 别名
- 河道清淤特种机器人
- 产品用途
- 河道、大坝、湖泊、沟道间、污水池等
机器人是一个能够在各种环境中自主行动和工作的机器,通常配备有多种传感器和执行器,可以在人的控制下完成各种任务。清淤机器人则是一种专门用于清理河道、河流、排水管道等水域环境的机器人,它具有一定的自主控制能力和水下行动能力,可以根据不同的任务需求进行精细化清淤。与普通机器人相比,清淤机器人具有以下不同之处:应用领域不同:普通机器人可以应用于各种领域,包括制造业、农业、医疗保健、服务业等,而清淤机器人则专门应用于水域环境治理领域。环境要求不同:普通机器人在各种环境中都可以工作,而清淤机器人则需要在水下环境中工作,对水质、水压、流速等参数有较高的要求。上海洲和智能科技有限公司是一家专业提供湖泊河道清淤的公司,欢迎您的来电哦!河北水下自动河道清淤施工方案

清淤机器人施工方案需要满足以下要求:施工前准备:进行施工前,需要充分了解施工环境、河道的形状和构造、淤积物成分等信息,以便选择合适的清淤机器人和其他相关设备。施工时间安排:清淤施工通常需要避开河道丰水期,选择在枯水期进行,以降低对周围环境和生态的影响。安全措施:施工过程中需要采取一定的安全措施,如设置警示标志、穿救生衣、配置救生圈等,确保施工人员的安全。施工质量管理:为确保施工质量,清淤机器人需要定期进行维护和检修,以确保其正常运行。同时,需要保证施工材料的质量,禁止使用低质量的产品。吉林湖泊河道清淤造价上海洲和智能科技有限公司湖泊河道清淤值得放心。
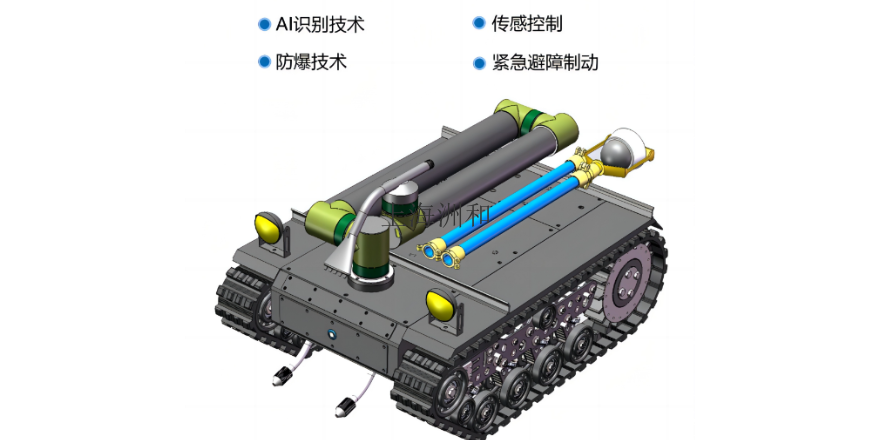
水下声学通信能力:水下探测机器人通常具备声学通信能力,可以通过水声信号与地面或者其他探测器进行通信,传递探测数据和信息,以便更好地协作和管理水下任务。水下环境感知能力:水下探测机器人通常装有多种传感器,可以感知水下环境的变化,如水温、水深、水质等参数,以便更好地适应水下环境。自动探测和识别能力:一些先进的水下探测机器人还具备自动探测和识别能力,可以通过图像识别、特征提取等技术自动发现和识别水下目标,以便更好地进行水下任务的自动化处理。总体来说,水下探测机器人具有多种特殊功能,可以广泛应用于水下考古、环境保护、海洋工程、水产养殖等多个领域。
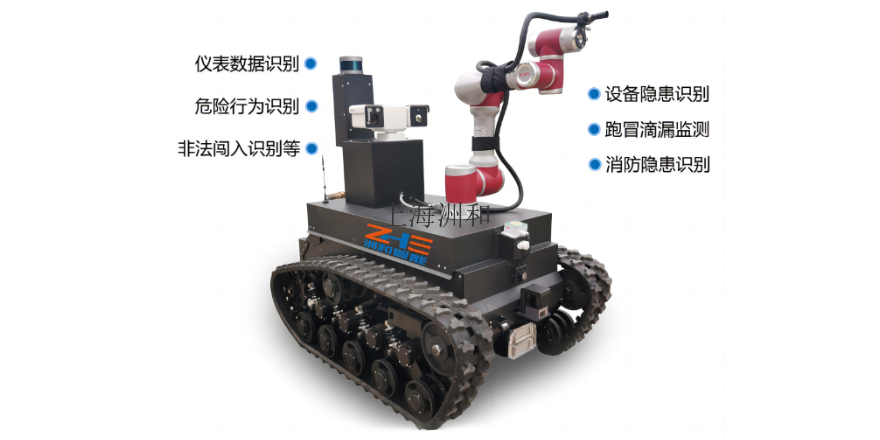
河道清淤机器人主要由以下关键部件组成:机器人本体:这是清淤机器人的主体结构,通常具有一定的承载能力和越障能力,可以在恶劣环境下稳定工作。控制器:控制器是机器人的大脑,它负责机器人的整体控制,根据传感器采集的信息进行处理并下达指令,以保证机器人的正常运行。传感器:这些是机器人的感知部件,用于获取机器人周围的环境信息,如水流、水位、地形等,为机器人提供决策依据。清扫设备:这是机器人用于清理淤泥、垃圾等物质的工具,可以根据不同的工作需求配备不同的设备,如机械臂、清淤刀、清淤箅子等。动力系统:为机器人提供行动所需的动力,通常包括电池、电机等。通讯系统:这是机器人与地面指挥系统进行信息交流的通道,用于实时传输图像、数据等信息。导航系统:用于确定机器人在环境中的位置和规划其行动路径,通常包括GPS、激光雷达等。这些部件协同工作,使河道清淤机器人能够在复杂的河道环境中完成清淤任务。智能机器河道清淤,就选上海洲和智能科技有限公司,用户的信赖之选,有需要可以联系我司哦!

按照施工进度计划指标配备设备的台数。在数量上要充足,不同种类的仪器和机具要配置合理。根据施工进度计划,需要合理安排设备的数量和种类,确保工程进度的顺利进行。同时,不同种类的设备需要根据其特点进行合理配置,以提高设备的利用率和施工效率。在施工高峰期,一方面要考虑满足数量的因素,另一方面要考虑有效的周转使用。在河道清淤机器人施工方案中,需要根据工程量和施工进度来合理安排设备的数量和种类,同时需要考虑设备在高峰期的有效周转使用。这需要合理安排设备的进场时间和退场时间,以确保设备能够很大限度地发挥其作用。综上所述,河道清淤机器人施工方案中的设备选择需要根据工程规模、施工任务和技术要求等因素进行综合考虑,以确保设备的性能指标符合工程要求,同时能够满足施工需求和提高施工效率。上海洲和智能科技有限公司致力于提供河道清淤,欢迎您的来电!广东河道清淤造价
智能机器河道清淤,就选上海洲和智能科技有限公司,用户的信赖之选。河北水下自动河道清淤施工方案
水下探测机器人除了上述提到的特殊功能以外,还有一些其他的特点:耐用性和可靠性:水下环境通常比较恶劣,有大量的水流和压力,温度变化也很大。因此,水下探测机器人必须具备较高的耐用性和可靠性,能够在这种环境中稳定工作。密封性和水密性:水下环境需要严格的密封性和水密性要求,以防止水的渗入和机器内部的泄漏。因此,水下探测机器人必须具备良好的密封性和水密性,确保在长时间的水下工作中不会出现渗漏等问题。能源管理:由于水下环境的能源传输较为困难,因此水下探测机器人必须具备良好的能源管理能力,能够有效地利用和管理能源,确保长时间的水下工作能力。远程控制和自主控制:水下探测机器人通常可以通过远程控制或自主控制进行操作。远程控制需要通过水面上方的控制系统进行操作,自主控制则通过机器自身携带的控制系统进行操作。材料选择:水下探测机器人需要选择合适的材料制造,以适应当下水环境的腐蚀和磨损等要求。通常会选择耐腐蚀、耐磨、抗压、耐高温等材料来制造机器人的外壳和内部零件。总体来说,水下探测机器人具有多种特点和要求,需要结合具体的应用场景和实际需求进行设计和应用。河北水下自动河道清淤施工方案

自主控制:清淤机器人需要具备一定的自主控制能力,以便在水下环境中单独完成清淤任务。这需要借助人工智能技术、传感器和算法等来实现。机械臂设计:清淤机器人通常需要配备机械臂来抓取和处理垃圾和淤泥等物质。因此,机械臂的设计需要考虑到水下环境的特殊要求,如防水性、灵活性和力量等方面。水质适应性:不同的水质环境对清淤机器人的工作效果和使用寿命有很大的影响。因此,在选择和使用清淤机器人时,需要考虑不同水质环境的特点,如浑浊度、温度、PH值等,以保证机器人的稳定性和适应性。总的来说,清淤机器人在水下环境中工作具有一些特殊要求,需要综合考虑机器人的防水设计、防腐蚀性、通讯设备、自主控制、机械臂设计和水质适应性...
- 江西城市河道清淤工程 2023-09-26
- 河南城市河道清淤造价 2023-09-26
- 江西智能机器河道清淤方案设计 2023-09-25
- 广西农村河道清淤 2023-09-25
- 四川智能机器河道清淤造价 2023-09-25
- 内蒙古特种机器人河道清淤价格 2023-09-25
- 江苏河道清淤作用 2023-09-25
- 江苏农村河道清淤方案设计 2023-09-24
- 山东特种机器人河道清淤作用 2023-09-24
- 西藏智能机器河道清淤定制 2023-09-24


- 浙江城市河道清淤 2023-09-23
- 湖南智能机器河道清淤 2023-09-23
- 山西智能化河道清淤施工方案 2023-09-23
- 福建特种机器人河道清淤施工方案 2023-09-23
- 江西水下自动河道清淤报价 2023-09-22
- 湖北智能机器河道清淤机器人 2023-09-22





- 壁挂式气体探测仪OEM 11-15
- 石油气体探测器价格 11-15
- 电化学气体探测器价格 11-15
- 有毒气体探测仪价格 11-15
- 扩散式气体报警控制器高防护等级IP 11-15
- 石油气气体报警控制器ODM 11-15
- 催化燃烧气体监测器怎么选 11-15
- 光离子气体探测器哪家好 11-15
- 远程气体报警器OEM 11-15
- 氢气气体探测器高防护等级IP66/ 11-15